YOLOV8 + 双目测距
YOLOV8 + 双目测距
- 1. 环境配置
- 2. 测距流程和原理
- 2.1 测距流程
- 2.2 测距原理
- 3. 代码部分解析
- 3.1 相机参数stereoconfig.py
- 3.2 测距部分
- 3.3 主代码yolov8-stereo.py
- 4. 实验结果
- 4.1 测距
- 4.2 测距+跟踪
- 4.3 测距+跟踪+分割
- 4.4 视频展示
相关文章
1. YOLOv5+双目测距(python)
2. YOLOv7+双目测距(python)
如果有用zed相机,可以进我主页👇👇👇直接调用内部相机参数,精度比双目测距好很多
https://blog.csdn.net/qq_45077760
下载链接(求STAR):https://github.com/up-up-up-up/YOLOv8-stereo
1. 环境配置
具体可见: Windows+YOLOV8环境配置
2. 测距流程和原理
2.1 测距流程
大致流程: 双目标定→双目校正→立体匹配→结合yolov8→深度测距
- 找到目标识别源代码中输出物体坐标框的代码段。
- 找到双目测距代码中计算物体深度的代码段。
- 将步骤2与步骤1结合,计算得到目标框中物体的深度。
- 找到目标识别网络中显示障碍物种类的代码段,将深度值添加到里面,进行显示
注:我所做的是在20m以内的检测,没计算过具体误差,当然标定误差越小精度会好一点,其次注意光线、亮度等影响因素,当然检测范围效果跟相机的好坏也有很大关系

2.2 测距原理
如果想了解双目测距原理,请移步该文章 双目三维测距(python)
3. 代码部分解析
3.1 相机参数stereoconfig.py
双目相机标定误差越小越好,我这里误差为0.1,尽量使误差在0.2以下
import numpy as np
# 双目相机参数
class stereoCamera(object):def __init__(self):self.cam_matrix_left = np.array([[1101.89299, 0, 1119.89634],[0, 1100.75252, 636.75282],[0, 0, 1]])self.cam_matrix_right = np.array([[1091.11026, 0, 1117.16592],[0, 1090.53772, 633.28256],[0, 0, 1]])self.distortion_l = np.array([[-0.08369, 0.05367, -0.00138, -0.0009, 0]])self.distortion_r = np.array([[-0.09585, 0.07391, -0.00065, -0.00083, 0]])self.R = np.array([[1.0000, -0.000603116945856524, 0.00377055351856816],[0.000608108737333211, 1.0000, -0.00132288199083992],[-0.00376975166958581, 0.00132516525298933, 1.0000]])self.T = np.array([[-119.99423], [-0.22807], [0.18540]])self.baseline = 119.99423
3.2 测距部分
这一部分我用了多线程加快速度,计算目标检测框中心点的深度值
config = stereoconfig_040_2.stereoCamera()
map1x, map1y, map2x, map2y, Q = getRectifyTransform(720, 1280, config)
thread = MyThread(stereo_threading, args=(config, im0, map1x, map1y, map2x, map2y, Q))
thread.start()
results = model.predict(im0, save=False, conf=0.5)
annotated_frame = results[0].plot()
boxes = results[0].boxes.xywh.cpu()
for i, box in enumerate(boxes):# for box, class_idx in zip(boxes, classes):x_center, y_center, width, height = box.tolist()x1 = x_center - width / 2y1 = y_center - height / 2x2 = x_center + width / 2y2 = y_center + height / 2if (0 < x2 < 1280):thread.join()points_3d = thread.get_result()# gol.set_value('points_3d', points_3d)a = points_3d[int(y_center), int(x_center), 0] / 1000b = points_3d[int(y_center), int(x_center), 1] / 1000c = points_3d[int(y_center), int(x_center), 2] / 1000distance = ((a ** 2 + b ** 2 + c ** 2) ** 0.5)
3.3 主代码yolov8-stereo.py
(1)加入了多线程处理,加快处理速度
(2)如果想打开相机,直接把cap = cv2.VideoCapture(‘a1.mp4’)改成cap = cv2.VideoCapture(0)即可
import cv2
import torch
import argparse
from ultralytics import YOLO
from stereo import stereoconfig_040_2
from stereo.stereo import stereo_40
from stereo.stereo import stereo_threading, MyThread
from stereo.dianyuntu_yolo import preprocess, undistortion, getRectifyTransform, draw_line, rectifyImage, \stereoMatchSGBMdef main():cap = cv2.VideoCapture('ultralytics/assets/a1.mp4')model = YOLO('yolov8n.pt')cv2.namedWindow('00', cv2.WINDOW_NORMAL)cv2.resizeWindow('00', 1280, 360) # 设置宽高out_video = cv2.VideoWriter('output.avi', cv2.VideoWriter_fourcc(*'XVID'), 30, (2560, 720))while True:ret, im0 = cap.read()if not ret:print("Video frame is empty or video processing has been successfully completed.")break# img = cv2.cvtColor(image_net, cv2.COLOR_BGRA2BGR)config = stereoconfig_040_2.stereoCamera()map1x, map1y, map2x, map2y, Q = getRectifyTransform(720, 1280, config)thread = MyThread(stereo_threading, args=(config, im0, map1x, map1y, map2x, map2y, Q))thread.start()results = model.predict(im0, save=False, conf=0.5)annotated_frame = results[0].plot()boxes = results[0].boxes.xywh.cpu()for i, box in enumerate(boxes):# for box, class_idx in zip(boxes, classes):x_center, y_center, width, height = box.tolist()x1 = x_center - width / 2y1 = y_center - height / 2x2 = x_center + width / 2y2 = y_center + height / 2if (0 < x2 < 1280):thread.join()points_3d = thread.get_result()# gol.set_value('points_3d', points_3d)a = points_3d[int(y_center), int(x_center), 0] / 1000b = points_3d[int(y_center), int(x_center), 1] / 1000c = points_3d[int(y_center), int(x_center), 2] / 1000distance = ((a ** 2 + b ** 2 + c ** 2) ** 0.5)if (distance != 0):text_dis_avg = "dis:%0.2fm" % distancecv2.putText(annotated_frame, text_dis_avg, (int(x2 + 5), int(y1 + 30)), cv2.FONT_ITALIC, 1.2,(0, 255, 255), 3)cv2.imshow('00', annotated_frame)out_video.write(annotated_frame)key = cv2.waitKey(1)if key == 'q':breakout_video.release()cap.release()cv2.destroyAllWindows()if __name__ == '__main__':parser = argparse.ArgumentParser()parser.add_argument('--weights', type=str, default='yolov8n.pt', help='model.pt path(s)')parser.add_argument('--svo', type=str, default=None, help='optional svo file')parser.add_argument('--img_size', type=int, default=416, help='inference size (pixels)')parser.add_argument('--conf_thres', type=float, default=0.4, help='object confidence threshold')opt = parser.parse_args()with torch.no_grad():main()
4. 实验结果
可实现测距、跟踪和分割功能,实现不同功能仅需修改以下代码,具体见 此篇文章
4.1 测距

4.2 测距+跟踪

4.3 测距+跟踪+分割

4.4 视频展示
相关文章:
YOLOV8 + 双目测距
YOLOV8 双目测距 1. 环境配置2. 测距流程和原理2.1 测距流程2.2 测距原理 3. 代码部分解析3.1 相机参数stereoconfig.py3.2 测距部分3.3 主代码yolov8-stereo.py 4. 实验结果4.1 测距4.2 测距跟踪4.3 测距跟踪分割4.4 视频展示 相关文章 1. YOLOv5双目测距(python&…...
前端:SVG绘制流程图
效果 代码 html代码 <!DOCTYPE html> <html lang"en"><head><meta charset"UTF-8"><title>SVG流程图示例</title><style>/* CSS 样式 */</style><script src"js/index.js"></script…...

【Linux系列】如何确定当前运行的是 RHEL 9 还是 RHEL 8?
💝💝💝欢迎来到我的博客,很高兴能够在这里和您见面!希望您在这里可以感受到一份轻松愉快的氛围,不仅可以获得有趣的内容和知识,也可以畅所欲言、分享您的想法和见解。 推荐:kwan 的首页,持续学…...

vscode开发java的插件和配置
推荐插件 .vscode/extensions.json {"recommendations": ["redhat.fabric8-analytics","ms-azuretools.vscode-docker","vscjava.vscode-java-pack","eamodio.gitlens","obkoro1.korofileheader","redhat.j…...

Mysql启动报错:本地计算机上的mysql服务启动后停止,某些服务在未由其他服务或程序使用时将自动停止
Mysql启动报错:本地计算机上的mysql服务启动后停止,某些服务在未由其他服务或程序使用时将自动停止 文章目录 Mysql启动报错:本地计算机上的mysql服务启动后停止,某些服务在未由其他服务或程序使用时将自动停止1. 备份mysql的data文件夹2. 重新构建 Wind…...

WPF程序添加托盘图标
程序添加托盘图标 UI层 //添加handycontrol的引用xmlns:hc"https://handyorg.github.io/handycontrol"//添加NotifyIcon图标 实现单击 双击 二级菜单点击功能<hc:NotifyIconText"通知"Token"Info"><hc:NotifyIcon.ContextMenu><…...

工业4g路由器联网后迅速掉线是什么原因?
工业4G路由器连接上网后迅速掉线可能是由多种因素造成的。以下是一些建议的检查和解决步骤: 1、信号问题: 信号强度:检查工业路由器信号强度指示灯,如果信号弱,尝试移动路由器位置或添加外部天线来增强信号。 网络拥…...

腾讯云4核8G服务器12M带宽646元1年零3个月,4C8G使用场景说明
腾讯云4核8G服务器多少钱?腾讯云4核8G轻量应用服务器12M带宽租用价格646元15个月,活动页面 txybk.com/go/txy 活动链接打开如下图所示: 腾讯云4核8G服务器优惠价格 这台4核8G服务器是轻量应用服务器,详细配置为:轻量4核…...

java - 读取配置文件
文章目录 1. properties2. XML(1) dom4j(2) XPath 1. properties // 创建properties对象用于读取properties文件Properties properties new Properties();properties.load(new FileReader("src/main/resources/test.properties"));String name properties.getPrope…...
Ubuntu22.04平台编译完美解决问题“error: GLSL 4.5 is not supported.”【GLSL(OpenGL着色器语言)】
GLSL介绍 GLSL(OpenGL着色器语言)是用于编写OpenGL着色器程序的语言。GLSL 4.5 是 GLSL 的一个版本,引入了许多新的特性和改进,旨在提高着色器编程的灵活性和性能。GLSL 4.5 工具通常是用于编写、调试和优化 GLSL 4.5 着色器代码…...
数据结构之搜索二叉树与关联性容器初接触
一、搜索二叉树 1>、前言 1. map和set特性需要先铺垫二叉搜索树,而二叉搜索树也是一种树形结构 2. 二叉搜索树的特性了解,有助于更好的理解map和set的特性。 2>、概念 二叉搜索树又称二叉排序树,它或者是一棵空树,或者…...

C语言整数和小数的存储
1.整数在内存中的存储 计算机使用二进制进行存储、运算,整数在内存中存储使用的是二进制补码 1.1原码、反码、补码 整数的2进制表⽰⽅法有三种,即 原码、反码和补码 三种表⽰⽅法均有符号位和数值位两部分,符号位都是⽤0表⽰“正”&am…...
Games101Homework【6】Acceleration structure(Including framework analysis)
Code Analysis: friend: C中友元(友元函数和友元类)的用法和功能_friend class a<b>-CSDN博客 [C:不如Coding](11):友元函数与友元类_哔哩哔哩_bilibili Here is a simple…...

应用运维文档1
统一nginx接入配置指南 Nginx配置规范 1:不带微服务编码上下文至后端,以metadata-ui为例 location段配置信息,location配置中维护微服务编码上下文信息 # app_code: metadata-ui 流水线名称: metadata-ui location ~ ^/metadata-ui/(?P.*) {set $app_code metadata-ui;p…...

手机如何在线制作gif?轻松一键在线操作
现在大家都喜欢使用手机来拍摄记录有趣的事物,但是时间长了手机里的视频越来越多导致手机存储空间不够了,这些视频又不想删除时应该怎么办呢?这个很简单,下面就给大家分享一款不用下载手机就能操作的视频转gif网站-GIF中文网&…...

ChatGPT 在做什么,为什么有效?
原文:What Is ChatGPT Doing … and Why Does It Work? 译者:飞龙 协议:CC BY-NC-SA 4.0 序言 这本简短的书试图从第一原理解释 ChatGPT 是如何工作的。在某种程度上,这是关于技术的故事。但它也是关于科学的故事。以及关于哲学…...
Linux实验2 初步使用shell
一:实验目的 学习Linux下的文件系统结构,了解最基本的Linux下的shell命令操作,例如ls, cd, cat等各种指令操作。 学习vim编辑器的使用方式,学习如何使用ssh连接远程服务器。 二:实验内容 1.请指出下面每…...
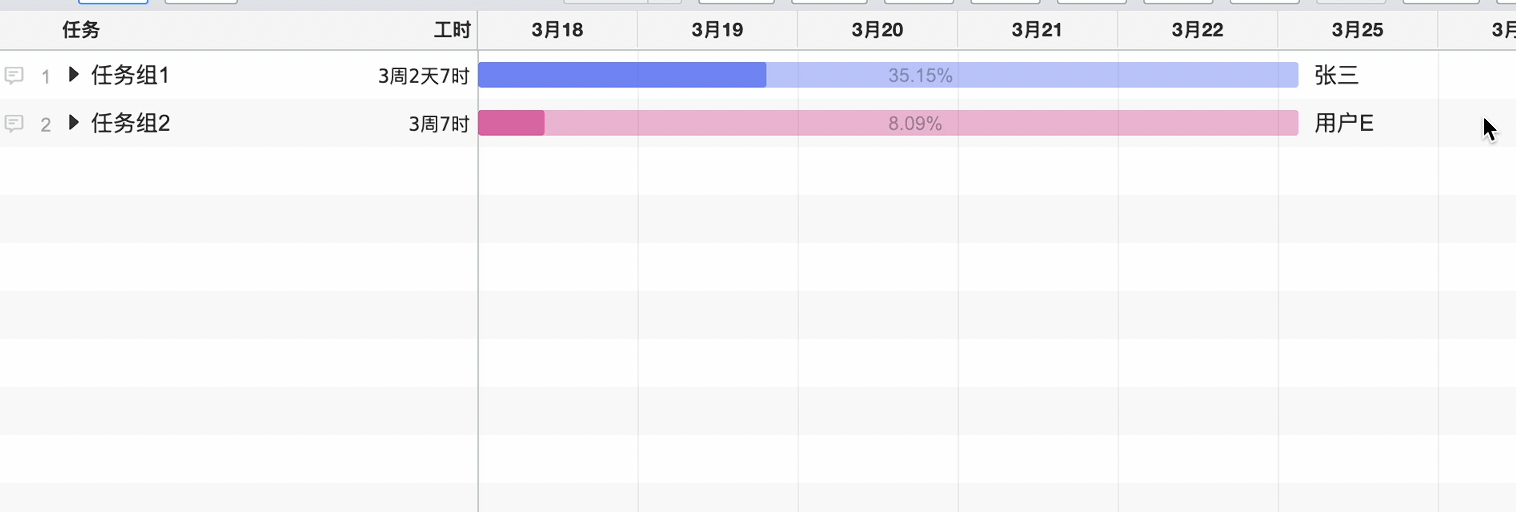
甘特图/横道图制作技巧 - 任务组
在甘特图中通过合理的任务分组可以让项目更加清晰,修改也更方便。 列如下面的甘特图一眼不太容易看清楚整体的进度。或者需要把所有的任务整体的延迟或者提前只能这样一个一个的任务调整,就比较麻烦。 通过给任务分组,看这上面整体的进度就…...
Web题记
反序列化补充知识: private变量会被序列化为:\x00类名\x00变量名 protected变量会被序列化为: \x00\*\x00变量名 public变量会被序列化为:变量名web254 这个逻辑不难,自己刚看的时候还奇怪是不是自己哪里想错了,因为…...

学习java第三十六天
Spring 官网列出的 Spring 的 6 个特征: 核心技术 :依赖注入(DI),AOP,事件(events),资源,i18n,验证,数据绑定,类型转换,SpEL。 测试 :模拟对象,…...
第19节 Node.js Express 框架
Express 是一个为Node.js设计的web开发框架,它基于nodejs平台。 Express 简介 Express是一个简洁而灵活的node.js Web应用框架, 提供了一系列强大特性帮助你创建各种Web应用,和丰富的HTTP工具。 使用Express可以快速地搭建一个完整功能的网站。 Expre…...
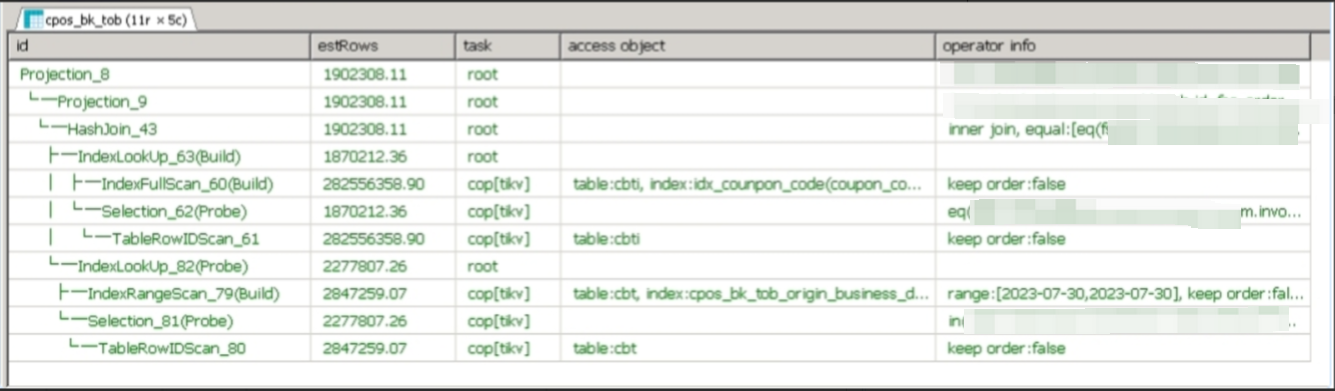
【入坑系列】TiDB 强制索引在不同库下不生效问题
文章目录 背景SQL 优化情况线上SQL运行情况分析怀疑1:执行计划绑定问题?尝试:SHOW WARNINGS 查看警告探索 TiDB 的 USE_INDEX 写法Hint 不生效问题排查解决参考背景 项目中使用 TiDB 数据库,并对 SQL 进行优化了,添加了强制索引。 UAT 环境已经生效,但 PROD 环境强制索…...
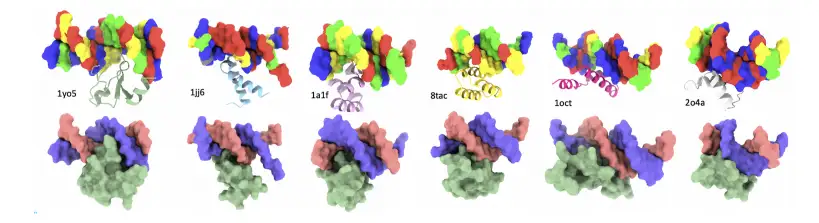
8k长序列建模,蛋白质语言模型Prot42仅利用目标蛋白序列即可生成高亲和力结合剂
蛋白质结合剂(如抗体、抑制肽)在疾病诊断、成像分析及靶向药物递送等关键场景中发挥着不可替代的作用。传统上,高特异性蛋白质结合剂的开发高度依赖噬菌体展示、定向进化等实验技术,但这类方法普遍面临资源消耗巨大、研发周期冗长…...

基于服务器使用 apt 安装、配置 Nginx
🧾 一、查看可安装的 Nginx 版本 首先,你可以运行以下命令查看可用版本: apt-cache madison nginx-core输出示例: nginx-core | 1.18.0-6ubuntu14.6 | http://archive.ubuntu.com/ubuntu focal-updates/main amd64 Packages ng…...

Golang dig框架与GraphQL的完美结合
将 Go 的 Dig 依赖注入框架与 GraphQL 结合使用,可以显著提升应用程序的可维护性、可测试性以及灵活性。 Dig 是一个强大的依赖注入容器,能够帮助开发者更好地管理复杂的依赖关系,而 GraphQL 则是一种用于 API 的查询语言,能够提…...
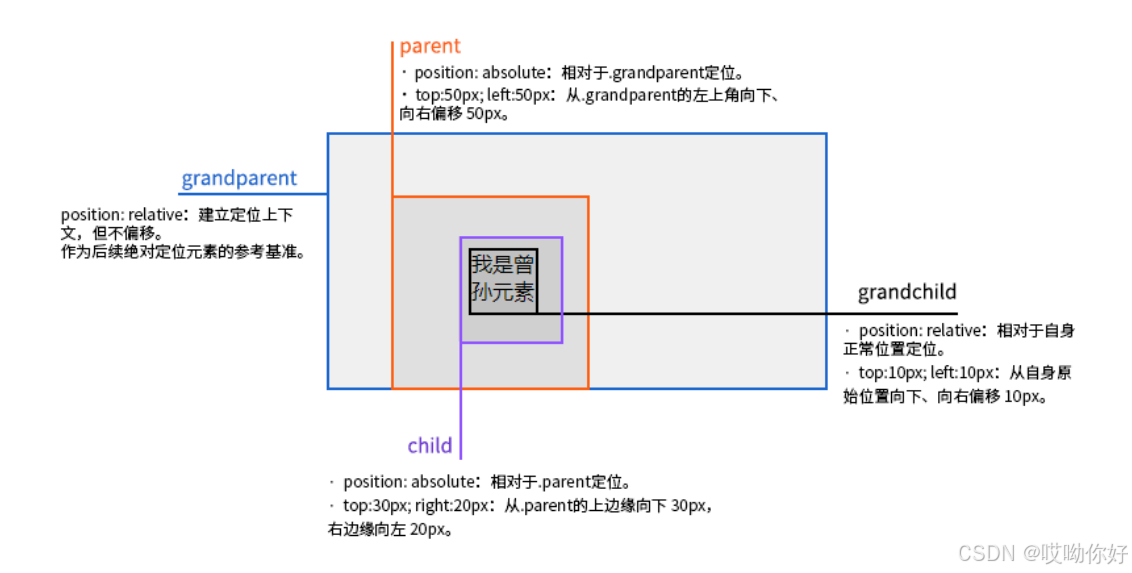
【CSS position 属性】static、relative、fixed、absolute 、sticky详细介绍,多层嵌套定位示例
文章目录 ★ position 的五种类型及基本用法 ★ 一、position 属性概述 二、position 的五种类型详解(初学者版) 1. static(默认值) 2. relative(相对定位) 3. absolute(绝对定位) 4. fixed(固定定位) 5. sticky(粘性定位) 三、定位元素的层级关系(z-i…...

镜像里切换为普通用户
如果你登录远程虚拟机默认就是 root 用户,但你不希望用 root 权限运行 ns-3(这是对的,ns3 工具会拒绝 root),你可以按以下方法创建一个 非 root 用户账号 并切换到它运行 ns-3。 一次性解决方案:创建非 roo…...
的原因分类及对应排查方案)
JVM暂停(Stop-The-World,STW)的原因分类及对应排查方案
JVM暂停(Stop-The-World,STW)的完整原因分类及对应排查方案,结合JVM运行机制和常见故障场景整理而成: 一、GC相关暂停 1. 安全点(Safepoint)阻塞 现象:JVM暂停但无GC日志,日志显示No GCs detected。原因:JVM等待所有线程进入安全点(如…...

Hive 存储格式深度解析:从 TextFile 到 ORC,如何选对数据存储方案?
在大数据处理领域,Hive 作为 Hadoop 生态中重要的数据仓库工具,其存储格式的选择直接影响数据存储成本、查询效率和计算资源消耗。面对 TextFile、SequenceFile、Parquet、RCFile、ORC 等多种存储格式,很多开发者常常陷入选择困境。本文将从底…...

省略号和可变参数模板
本文主要介绍如何展开可变参数的参数包 1.C语言的va_list展开可变参数 #include <iostream> #include <cstdarg>void printNumbers(int count, ...) {// 声明va_list类型的变量va_list args;// 使用va_start将可变参数写入变量argsva_start(args, count);for (in…...