如何使用PCL处理ROS Bag文件中的点云数据并重新保存 ubuntu20.04
如何使用PCL处理ROS Bag文件中的点云数据并重新保存
要精确地处理ROS bag中的点云数据并使用PCL进行处理,再将处理后的数据保存回新的ROS bag文件,以下方案提供了详细、专业和严谨的步骤。
步骤 1: 环境设置
确保安装了ROS和PCL,并配置好环境。安装pcl_ros包提供了必要的ROS到PCL的转换功能。
-
安装ROS:
- 根据您的操作系统,从ROS官方网站下载并安装合适版本的ROS。
-
安装PCL和
pcl_ros:- PCL可能已作为ROS的一部分自动安装,但也可以单独安装。在Ubuntu上,你可以使用以下命令安装PCL和
pcl_ros:sudo apt-get install libpcl-dev ros-[ros-version]-pcl-ros - 替换
[ros-version]为你的ROS版本,如melodic或noetic。
- PCL可能已作为ROS的一部分自动安装,但也可以单独安装。在Ubuntu上,你可以使用以下命令安装PCL和
步骤 2: 创建ROS包和节点
创建一个新的ROS包,并编写一个C++节点,用于订阅bag文件中的点云数据,处理它们,并将结果发布到新的ROS主题中。
-
创建ROS包:
- 创建包含必要依赖的新包:
source /opt/ros/[ros-version]/setup.bash mkdir -p ~/catkin_ws/src cd ~/catkin_ws/src catkin_create_pkg pcl_processor roscpp pcl_conversions pcl_ros sensor_msgs cd .. catkin_make source devel/setup.bash
- 创建包含必要依赖的新包:
-
编写节点代码:
- 在包的
src目录中创建pcl_processor_node.cpp:#include <ros/ros.h> #include <sensor_msgs/PointCloud2.h> #include <pcl_conversions/pcl_conversions.h> #include <pcl/point_cloud.h> #include <pcl/point_types.h> #include <pcl/filters/voxel_grid.h> #include <pcl_ros/transforms.h>class PCLProcessor { public:PCLProcessor() {// Initialize ROS subscriber and publishersubscriber = node_handle.subscribe("/input_topic", 1, &PCLProcessor::pointCloudCallback, this);publisher = node_handle.advertise<sensor_msgs::PointCloud2>("/output_topic", 1);}void pointCloudCallback(const sensor_msgs::PointCloud2ConstPtr& input_cloud_msg) {// Convert ROS point cloud to PCL point cloudpcl::PointCloud<pcl::PointXYZ>::Ptr raw_cloud(new pcl::PointCloud<pcl::PointXYZ>);pcl::fromROSMsg(*input_cloud_msg, *raw_cloud);// Perform processing using PCLpcl::PointCloud<pcl::PointXYZ>::Ptr processed_cloud(new pcl::PointCloud<pcl::PointXYZ>);pcl::VoxelGrid<pcl::PointXYZ> sor;sor.setInputCloud(raw_cloud);sor.setLeafSize(0.01f, 0.01f, 0.01f);sor.filter(*processed_cloud);// Convert processed PCL point cloud back to ROS messagesensor_msgs::PointCloud2 output_cloud_msg;pcl::toROSMsg(*processed_cloud, output_cloud_msg);output_cloud_msg.header.frame_id = input_cloud_msg->header.frame_id;output_cloud_msg.header.stamp = ros::Time::now();// Publish the processed cloudpublisher.publish(output_cloud_msg);}private:ros::NodeHandle node_handle;ros::Subscriber subscriber;ros::Publisher publisher; };int main(int argc, char** argv) {ros::init(argc, argv, "pcl_processor_node");PCLProcessor processor;ros::spin();return 0; }
- 在包的
步骤 3: 编译和启动节点
-
编译ROS包:
- 在catkin工作空间中运行
catkin_make以编译新创建的包。
- 在catkin工作空间中运行
-
运行处理节点:
- 启动节点以开始处理数据:
source ~/catkin_ws/devel/setup.bash rosrun pcl_processor pcl_processor_node
- 启动节点以开始处理数据:
步骤 4: 录制处理后的数据
- 使用rosbag录制新的数据:
- 开启另一个终端,开始录制处理后发布的点云数据:
rosbag record -O processed_output.bag /output_topic
- 开启另一个终端,开始录制处理后发布的点云数据:
步骤 5: 播放原始bag文件
- 在另一个终端,播放原始bag文件,触发点云数据的流动:
rosbag play your_original_bagfile.bag
通过以上步骤,您可以直接对ROS bag中的点云数据进行PCL处理,并将处理后的数据再转为新的ROS bag文件,实现了一个闭环的点云数据处理流程。这种处理方式适用于需要在ROS环境中高效、自动化地处理大量点云数据的应用场景。
相关文章:

如何使用PCL处理ROS Bag文件中的点云数据并重新保存 ubuntu20.04
如何使用PCL处理ROS Bag文件中的点云数据并重新保存 要精确地处理ROS bag中的点云数据并使用PCL进行处理,再将处理后的数据保存回新的ROS bag文件,以下方案提供了详细、专业和严谨的步骤。 步骤 1: 环境设置 确保安装了ROS和PCL,并配置好环…...
)
背包问题(动态规划)
背包问题是一种组合优化的问题,它有多种变体,但最常见的两种是0/1背包问题和完全背包问题。 0/1背包问题 问题描述: 假设你有一个背包,背包的容量为W(可以是重量或者体积等度量),同时有n个物品…...

从0开始学习机器学习--Day26--聚类算法
无监督学习(Unsupervised learning and introduction) 监督学习问题的样本 无监督学习样本 如图,可以看到两者的区别在于无监督学习的样本是没有标签的,换言之就是无监督学习不会赋予主观上的判断,需要算法自己去探寻区别,第二张…...

Vue3插槽v-slot使用方式
在 Vue 3 中,v-slot 是用来定义和使用插槽的指令。插槽是 Vue 的一个功能,允许你在组件内部定义占位内容,便于在父组件中提供动态内容。以下是 v-slot 的详细使用方法: 1. 基础使用 <template><BaseComponent><te…...

Axure二级菜单下拉交互实例
1.使用boxlabe进行基础布局 2.设置鼠标悬浮和选中状态 3.转换为动态面板 选中所有二级菜单,进行按钮组转换 选中所有二级菜单,进行动态面板转换 4.给用户管理增加显示/隐藏事件 1)选择toggle代表上拉和下拉切换加载 2)勾选Bring to Front,并选择Push/Pull Widgets代表收缩时…...

华为VPN技术
1.启动设备 2.配置IP地址 [FW1]int g1/0/0 [FW1-GigabitEthernet1/0/0]ip add 192.168.1.254 24 [FW1-GigabitEthernet1/0/0]int g1/0/1 [FW1-GigabitEthernet1/0/1]ip add 100.1.1.1 24 [FW1-GigabitEthernet1/0/1]service-manage ping permit [FW2]int g1/0/0 [FW2-Gi…...

CommonsBeanutils与Shiro发序列化利用的学习
一、前言 前面的学习中,过了一遍cc1-cc7的利用链,在CC2的利用链中,学习了 java.util.PriorityQueue,它在Java中是一个优先队列,队列中每一个元素都有自己的优先级。在反序列化这个对象时,为了保证队列顺序…...

运维云计算SRE-第2周
1. 总结学过的权限,属性及ACL相关命令及选项,示例。 一、Linux安全模型 (一)资源分派 Authentication(认证):验证用户身份,确保登录系统的用户是合法的。 Authorization(…...

React Native 全栈开发实战班 - 用户界面进阶之响应式设计实践
在移动应用开发中,响应式设计 是确保应用在不同设备、屏幕尺寸和方向下都能提供良好用户体验的关键。React Native 提供了多种工具和技巧来实现响应式设计,包括 Flexbox 布局、动态样式、屏幕尺寸适配等。本章节将详细介绍如何在 React Native 中进行响应…...

SlickGrid点击/双击事件
分析 SlickGrid提供了点击事件方法grid.onClick和grid.onDblClick用于捕获用户对表格列的点击,捕获到点击事件之后,修改表格数据,然后使用grid.updateRow方法将修改后的数据更新到表格中。 展示 代码 创建grid(HTML)…...

一文详细深入总结服务器选型
1. 题记: 服务器选型工作是项目规划检讨的一项非常重要的工作,本文详细深入总结服务器选型。 2. 服务器基础知识概览 2.1 服务器的定义与功能 2.1 .1 定义 服务器是一种高性能计算机,其设计目的是在网络中提供服务。它可以处理来自多个客…...
二、Nginx的TCP/UDP调度器(四层代理))
一、Nginx反向代理(七层代理)二、Nginx的TCP/UDP调度器(四层代理)
一、Nginx反向代理(七层代理) 实验要求 使用Nginx实现Web反向代理功能,实现如下功能: 后端Web服务器两台,可以使用httpd实现Nginx采用轮询的方式调用后端Web服务器两台Web服务器的权重要求设置为不同的值最大失败次数为…...

CSS+JQuery 实现弹力球效果,碰到屏幕边框弹回
实现弹力球效果,碰到屏幕边框弹回,效果如下 代码如下: <img src"../image/ball.png" alt"" class"ball"> <style>.ball {position: fixed;top: 50vh;left: 50vw;width: 15vw;height: 15vw;border…...

shell编程规范和脚本变量
什么是shell 人和计算机内核之间的中介: 计算机的语言是二进制,把人类的语言翻译成计算机能够识别的语言,然后让内核来处理 内核完成之后要把结果反馈给用户,要把计算机的翻译成人类能够识别的语言 命令解释器,pyc…...

jspm美容院管理系统
摘要 首先,论文一开始便是清楚的论述了系统的研究内容。其次,剖析系统需求分析,弄明白“做什么”,分析包括业务分析和业务流程的分析以及用例分析,更进一步明确系统的需求。然后在明白了系统的需求基础上需要进一步地设计系统,主要包罗软件架构模式、整体功能模块、数据库设计…...

Prometheus结合K8s(二)使用
上一篇介绍了如何搭建 Prometheus结合K8s(一)搭建-CSDN博客,这章介绍使用 页面访问 kubectl get svc -n prom 看promeheus和granfana的端口访问页面 Prometheus 点击status—target,可以看到metrics的数据来源,即各…...

【虚幻引擎】UE5数字人开发实战教程
本套课程将会交大家如何去开发属于自己的数字人,包含大模型接入,流式输出,语音识别,语音合成,口型驱动,动画蓝图,语音唤醒等功能。 课程介绍视频如下: 【虚幻引擎】UE5 历时一个多月…...

深入分析:固定参考框架在RViz中的作用与对数据可视化的影响 ros ubuntu20.04
深入分析:固定参考框架在RViz中的作用与对数据可视化的影响 RViz (Robot Visualization) 是 ROS (Robot Operating System) 中一种重要的三维可视化工具,主要用于实时观察和分析传感器数据、机器人状态信息以及环境模型。RViz的核心功能之一是固定参考框…...

Android:时间选择器(最下面有效果图)
1.创建DateUtil类 /*** Created by wangshuai on 2024/11/19.*/ public class DateUtil {public final static String PATTERN_ALL"yyyy-MM-dd HH:mm:ss";public final static String PATTERN_DEFAULT"yyyy-MM-dd";/*** 获取当前时间* return yyyy-MM-dd*…...
-c++/c)
第十六届蓝桥杯模拟赛(第一期)-c++/c
c/c蓝桥杯模拟赛题解,非常详细 质因数 1、填空题 【问题描述】 如果一个数 p 是个质数,同时又是整数 a 的约数,则 p 称为 a 的一个质因数。 请问 2024 有多少个质因数。 【答案提交】 这是一道结果填空的题,你只需要算出结果后提…...
linux之kylin系统nginx的安装
一、nginx的作用 1.可做高性能的web服务器 直接处理静态资源(HTML/CSS/图片等),响应速度远超传统服务器类似apache支持高并发连接 2.反向代理服务器 隐藏后端服务器IP地址,提高安全性 3.负载均衡服务器 支持多种策略分发流量…...

【Oracle APEX开发小技巧12】
有如下需求: 有一个问题反馈页面,要实现在apex页面展示能直观看到反馈时间超过7天未处理的数据,方便管理员及时处理反馈。 我的方法:直接将逻辑写在SQL中,这样可以直接在页面展示 完整代码: SELECTSF.FE…...
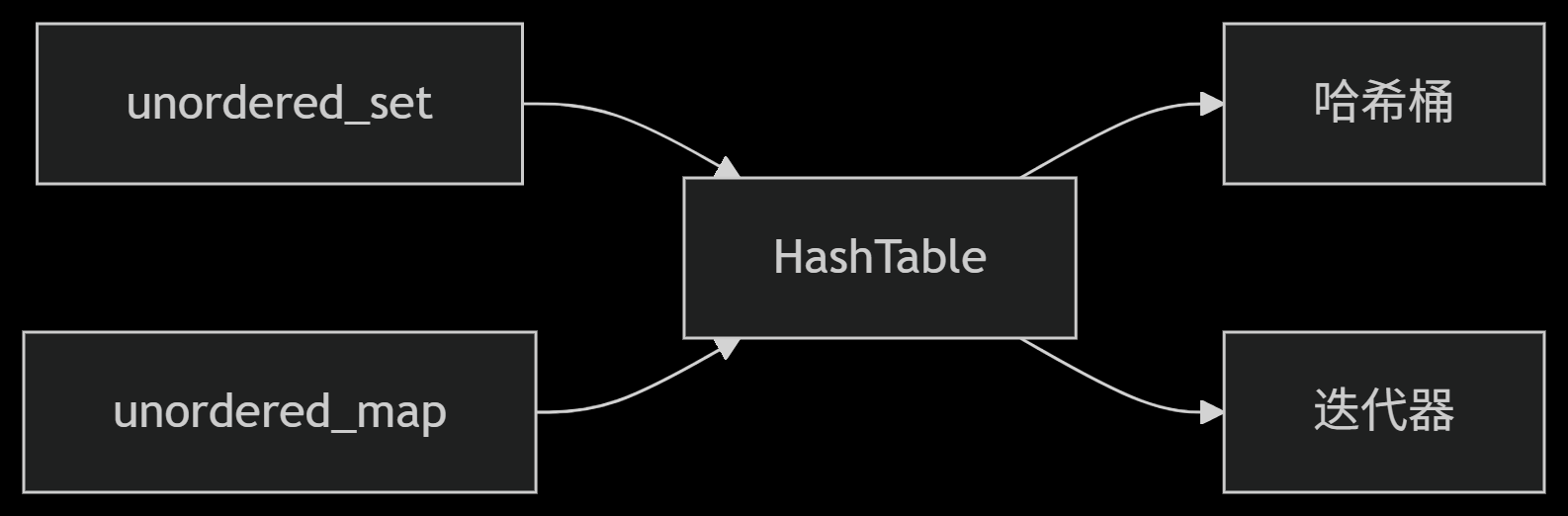
从零实现STL哈希容器:unordered_map/unordered_set封装详解
本篇文章是对C学习的STL哈希容器自主实现部分的学习分享 希望也能为你带来些帮助~ 那咱们废话不多说,直接开始吧! 一、源码结构分析 1. SGISTL30实现剖析 // hash_set核心结构 template <class Value, class HashFcn, ...> class hash_set {ty…...
)
GitHub 趋势日报 (2025年06月08日)
📊 由 TrendForge 系统生成 | 🌐 https://trendforge.devlive.org/ 🌐 本日报中的项目描述已自动翻译为中文 📈 今日获星趋势图 今日获星趋势图 884 cognee 566 dify 414 HumanSystemOptimization 414 omni-tools 321 note-gen …...

汇编常见指令
汇编常见指令 一、数据传送指令 指令功能示例说明MOV数据传送MOV EAX, 10将立即数 10 送入 EAXMOV [EBX], EAX将 EAX 值存入 EBX 指向的内存LEA加载有效地址LEA EAX, [EBX4]将 EBX4 的地址存入 EAX(不访问内存)XCHG交换数据XCHG EAX, EBX交换 EAX 和 EB…...

【Linux】Linux 系统默认的目录及作用说明
博主介绍:✌全网粉丝23W,CSDN博客专家、Java领域优质创作者,掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域✌ 技术范围:SpringBoot、SpringCloud、Vue、SSM、HTML、Nodejs、Python、MySQL、PostgreSQL、大数据、物…...
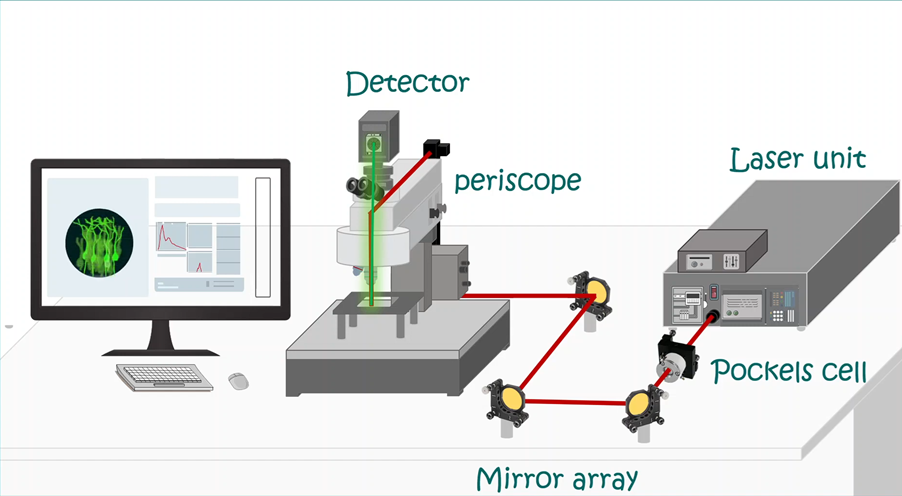
LabVIEW双光子成像系统技术
双光子成像技术的核心特性 双光子成像通过双低能量光子协同激发机制,展现出显著的技术优势: 深层组织穿透能力:适用于活体组织深度成像 高分辨率观测性能:满足微观结构的精细研究需求 低光毒性特点:减少对样本的损伤…...
基于Java+VUE+MariaDB实现(Web)仿小米商城
仿小米商城 环境安装 nodejs maven JDK11 运行 mvn clean install -DskipTestscd adminmvn spring-boot:runcd ../webmvn spring-boot:runcd ../xiaomi-store-admin-vuenpm installnpm run servecd ../xiaomi-store-vuenpm installnpm run serve 注意:运行前…...

wpf在image控件上快速显示内存图像
wpf在image控件上快速显示内存图像https://www.cnblogs.com/haodafeng/p/10431387.html 如果你在寻找能够快速在image控件刷新大图像(比如分辨率3000*3000的图像)的办法,尤其是想把内存中的裸数据(只有图像的数据,不包…...

Java 与 MySQL 性能优化:MySQL 慢 SQL 诊断与分析方法详解
文章目录 一、开启慢查询日志,定位耗时SQL1.1 查看慢查询日志是否开启1.2 临时开启慢查询日志1.3 永久开启慢查询日志1.4 分析慢查询日志 二、使用EXPLAIN分析SQL执行计划2.1 EXPLAIN的基本使用2.2 EXPLAIN分析案例2.3 根据EXPLAIN结果优化SQL 三、使用SHOW PROFILE…...