open3d点云配准函数registration_icp
文章目录
- 基本原理
- open3d调用
- 绘图
基本原理
ICP, 即Iterative Closest Point, 迭代点算法。
ICP算法有多种形式,其中最简单的思路就是比较点与点之间的距离,对于点云P={pi},Q={qi}P=\{p_i\}, Q=\{q_i\}P={pi},Q={qi}而言,如果二者是同一目标,通过旋转、平移等操作可以实现重合的话,那么只需要固定QQQ而不断地旋转或平移PPP,最终二者一定能最完美地重合。
设旋转PPP的矩阵为RRR,平移矩阵为ttt,在完美匹配的情况下,必有qi=Rpi+tq_i = Rp_i + tqi=Rpi+t。
又因三维点云不具备栅格特征,故而很难保证qiq_iqi和pip_ipi是同一点,所以要使得目标函数最小化
arg minR,t12∑i=1n∥qi−Rpi−t∥2\argmin_{R,t}\frac{1}{2}\sum^n_{i=1}\Vert q_i-Rp_i-t\Vert^2 R,targmin21i=1∑n∥qi−Rpi−t∥2
1992年Chen和Medioni对此方案进行了改进,提出了点对面的预估方法,其目标函数为
arg minR,t12∑i=1n[(qi−Rpi)⋅np]2\argmin_{R,t}\frac{1}{2}\sum^n_{i=1}[(q_i-Rp_i)\cdot n_p]^2 R,targmin21i=1∑n[(qi−Rpi)⋅np]2
其中npn_pnp是点ppp的法线,这种方案显然效率更高。
open3d调用
open3d中实现了ICP算法,参数如下
registration_icp(source, target, max_correspondence_distance, init, estimation_method, criteria)
source为点云PPP,target为目标点云QQQ,max_correspondence_distance为匹配点在未匹配时的最大距离,init为初始变化矩阵,默认为单位矩阵;criteria为精度。
estimation_method可以理解为上面提到的两种方案,下面选择点对点ICP方法进行计算
import numpy as np
import open3d as o3dpipreg = o3d.pipelines.registrationpcd = o3d.data.DemoICPPointClouds()
src = o3d.io.read_point_cloud(pcd.paths[0])
tar = o3d.io.read_point_cloud(pcd.paths[1])
th = 0.02
trans_init = np.array([[0.862, 0.011, -0.507, 0.5], [-0.139, 0.967, -0.215, 0.7],[0.487, 0.255, 0.835, -1.4], [0.0, 0.0, 0.0, 1.0]])reg = pipreg.registration_icp(src, tar, th, trans_init,pipreg.TransformationEstimationPointToPoint())print(reg.transformation)
''' 变换矩阵
[[ 0.83924644 0.01006041 -0.54390867 0.64639961][-0.15102344 0.96521988 -0.21491604 0.75166079][ 0.52191123 0.2616952 0.81146378 -1.50303533][ 0. 0. 0. 1. ]]
'''
print(reg)
print(reg)的返回信息如下,表示点云配准的拟合程度
RegistrationResult with fitness=3.724495e-01, inlier_rmse=7.760179e-03, and correspondence_set size of 74056 Access transformation to get result.
绘图
为了对比配准前后的区别,对src和tar放在图中对比
import copy
srcDraw = copy.deepcopy(src)
tarDraw = copy.deepcopy(tar)
srcDraw.paint_uniform_color([1, 1, 0])
tarDraw.paint_uniform_color([0, 1, 1])
srcDraw.transform(tf)
o3d.visualization.draw_geometries([srcDraw, tarDraw])
此为原图,可以看到两组点云完全是错位的

srcDraw = copy.deepcopy(src)
tarDraw.paint_uniform_color([0, 1, 1])
srcDraw.transform(reg.transformation)
o3d.visualization.draw_geometries([srcDraw, tarDraw])
得到结果如下,可见两组不同颜色的点云已经几乎重合到了一起

相关文章:
open3d点云配准函数registration_icp
文章目录基本原理open3d调用绘图基本原理 ICP, 即Iterative Closest Point, 迭代点算法。 ICP算法有多种形式,其中最简单的思路就是比较点与点之间的距离,对于点云P{pi},Q{qi}P\{p_i\}, Q\{q_i\}P{pi},Q{qi}而言,如果二者是同一目标&am…...
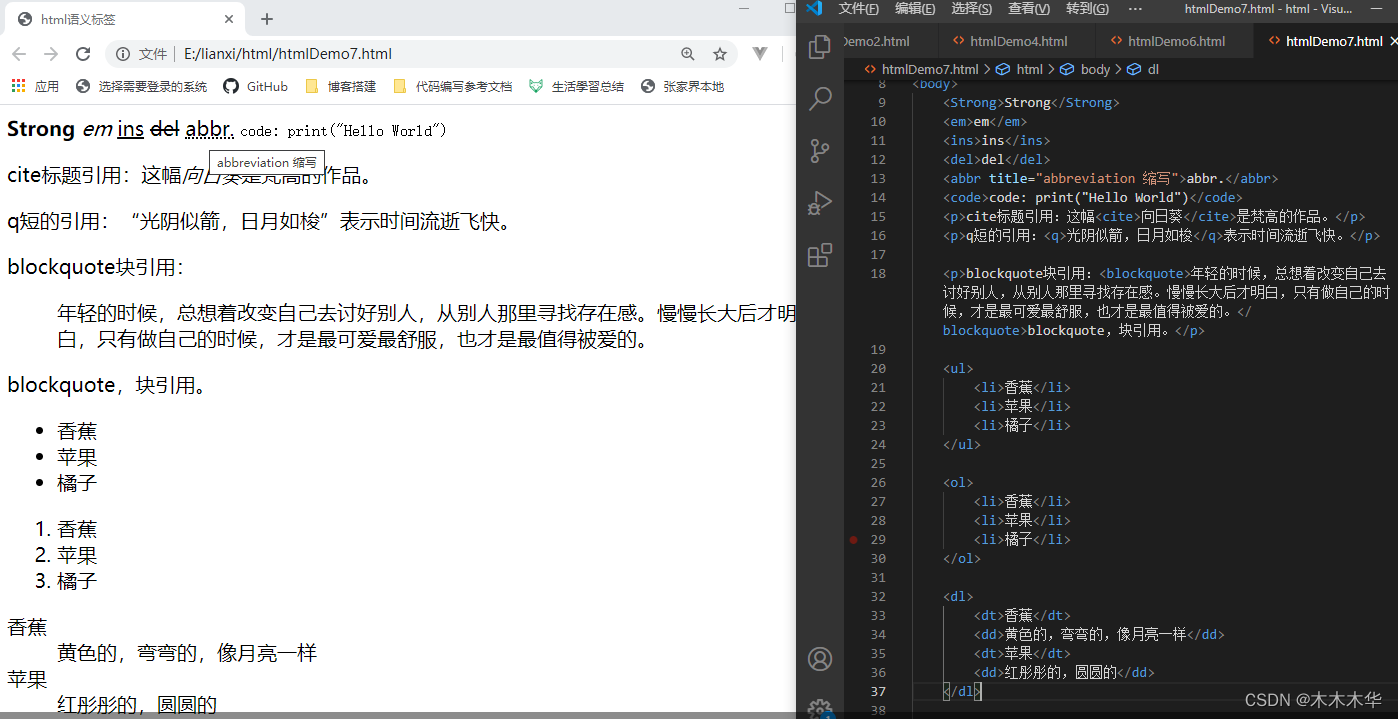
HTML编码规范
本篇文章是基于王叨叨大佬师父维护的文档梳理的,有兴趣可以去看一下原文HTML编码规范。 1. 缩进与换行 【建议】 使用 2 个空格作为一个缩进层级,不允许使用tab字符 解释: 具体项目,可以使用2个空格,也可以使用…...
PDF SDK for Linux 8.4.2 Crack
PDF SDK for Linux 是适用于任何 Linux 企业或云应用程序的强大解决方案,非常适合需要完全可定制的 PDF 查看器或后端流程的任何 Linux 开发人员。 将 Foxit PDF SDK 嵌入到基于 Linux 的应用程序中非常容易。只需打开您最喜欢的 Linux IDE,复制您需要的…...
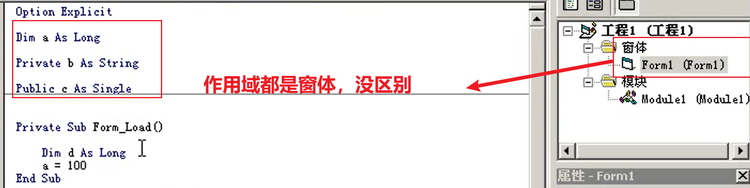
vb 模块和作用域的关系
模块在VB中有三种类型的模块,分别是窗体模块、标准模块和类模块。窗体模块窗体模块中包含了窗体以及窗体中所有控件的事件过程,文件扩展名为(*.frm),窗体文件中不仅包含窗体对象的外观设计,也包含窗体模块(…...
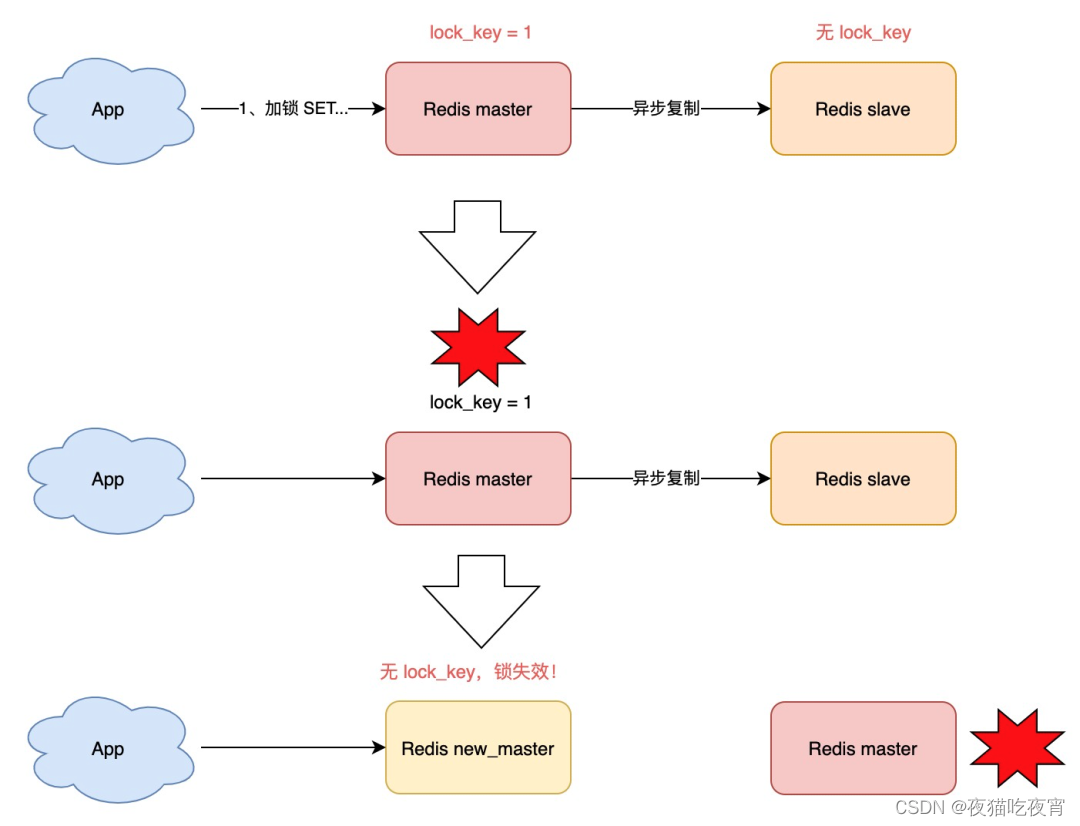
Redis分布式锁
一、背景 与分布式锁相对应的是「单机锁」,我们在写多线程程序时,避免同时操作一个共享变量产生数据问题,通常会使用一把锁来「互斥」,以保证共享变量的正确性,其使用范围是在「同一个进程」中。单机环境下࿰…...

京东前端经典面试题整理
img的srcset属性的作⽤? 响应式页面中经常用到根据屏幕密度设置不同的图片。这时就用到了 img 标签的srcset属性。srcset属性用于设置不同屏幕密度下,img 会自动加载不同的图片。用法如下: <img src"image-128.png" srcset&qu…...

django+mysql实现一个简单的web登录页面
目录 一、使用pyacharm创建一个django项目 二、启动django项目验证 三、配置mysql数据库 1、本地安装mysql数据库 1)安装mysql数据库 2)自己创建一个数据库 2、安装 pymysql 3、配置mysql数据库 1)在项目同名包下的_init_.py里面添加…...

python cartopy手动导入地图数据绘制底图/python地图上绘制散点图:Downloading:warnings/散点图添加图里标签
……开学回所,打开电脑spyder一看一脸懵逼,简直不敢相信这些都是我自己用过的代码,想把以前的自己喊过来科研了() 废话少说,最近写小综述论文,需要绘制一个地图底图+散点图ÿ…...

JavaScript中常用的数组方法
在日常开发中,我们会接触到js中数组的一些方法,这些方法对我们来说,可以很便利的达到我们想要的结果,但是因为方法比较多,有些方法也不常用,可能会过一段时间就会忘记,那么在这里我整理了一些数…...

磁疗为什么“没效果”?原来真相是这样!
很多人磁疗之后, 总爱迫不及待问一个问题: “这个多长时间见效啊?” …… 还有些人几天没有效果, 就果断下结论: “这东西没用!” …… 有不少人错误地把磁疗等同于“药品”一样看待,总觉得…...

【直击招聘C++】5.1函数模板
5.1函数模板一、要点归纳1.定义函数模板2.实例化函数模板3.重载模板函数4.函数调用的匹配顺序一、要点归纳 1.定义函数模板 定义函数模板的一般格式如下: template<类型形参表> 返回类型 函数名(形参表) {函数体; }例如以…...

谈谈Java多线程离不开的AQS
如果你想深入研究Java并发的话,那么AQS一定是绕不开的一块知识点,Java并发包很多的同步工具类底层都是基于AQS来实现的,比如我们工作中经常用的Lock工具ReentrantLock、栅栏CountDownLatch、信号量Semaphore等,而且关于AQS的知识点…...
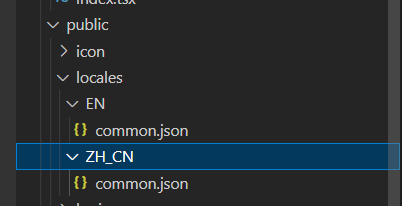
国际化语言,多语言三种方式
可以用透传的方式,自己写local的json文件,不需要配置什么,直接传,自己写方法i18n nextjsi18n umi4一、透传的方式 export const AppContext React.createContext<any>({})app.tsx 用context包裹import type { AppProps } f…...
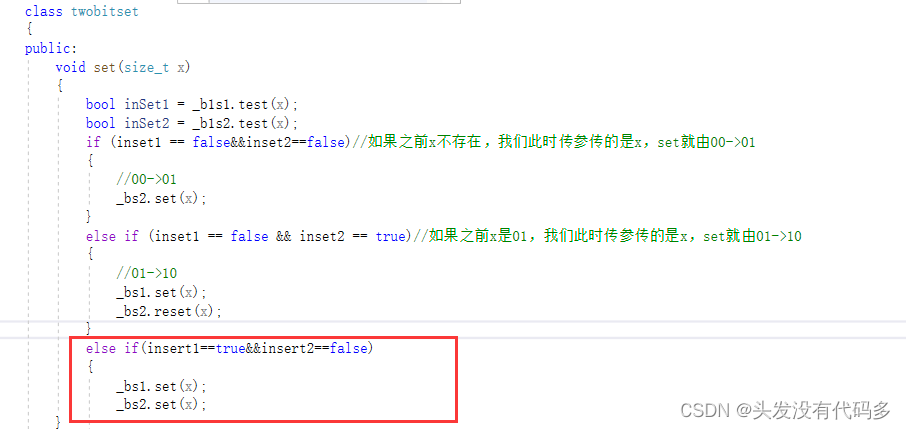
C++——哈希3|位图
目录 常见哈希函数 位图 位图扩展题 位图的应用 常见哈希函数 1. 直接定址法--(常用) 这种方法不存在哈希冲突 取关键字的某个线性函数为散列地址:Hash(Key) A*Key B 优点:简单、均匀 缺点:需要事先知道关键字的…...

75 error
全部 答对 答错 选择题 3. 某公司非常倚重预测型方法交付项目,而其招聘的新项目经理却习惯于运用混合型方法。项目范围包含很多不清晰的需求。项目经理应该如何规划项目的交付? A company that is heavily focused on delivering projects using predi…...
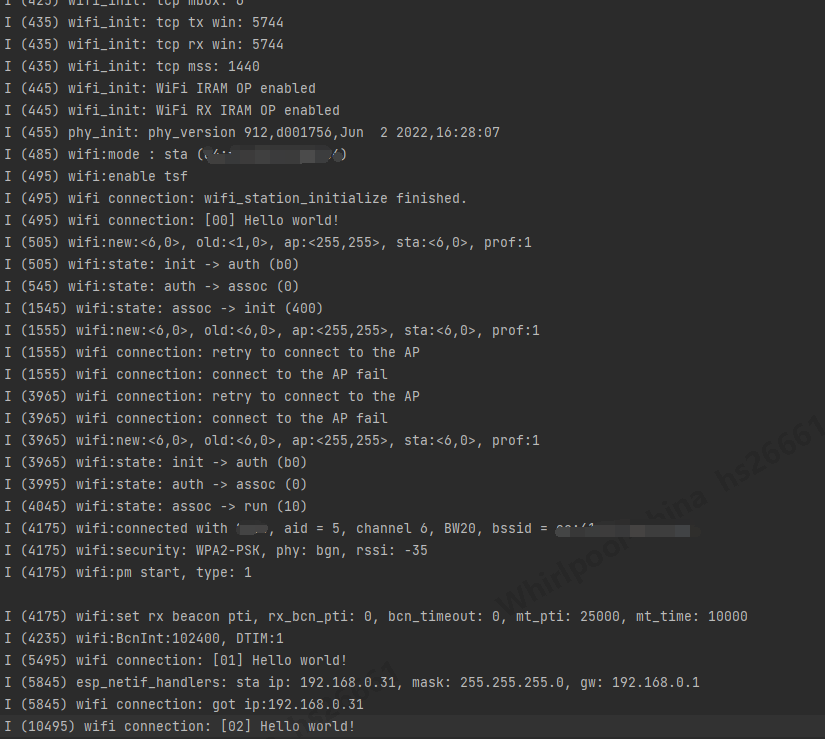
ESP-C3入门8. 连接WiFi并打印信息
ESP-C3入门8. 连接WiFi并打印信息一、ESP32 连接WiFi的基本操作流程1. 初始化nvs存储2. 配置WiFi工作模式3. 设置WiFi登陆信息4. 启动WiFi5. 开启连接6. 判断是否成功二、事件处理函数1. 定义事件处理函数2. 创建事件组3. 在事件处理函数中设置事件组位4. 在其他任务中等待事件…...
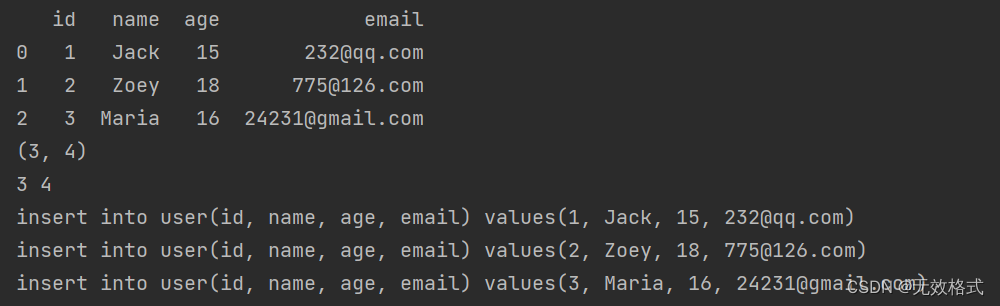
使用python将EXCEL表格中数据转存到数据库
使用Python将excel表格中数据转存到数据库 1. 思路: 1) 使用python读取excel表格中数据 2)根据数据生成sql语句 3)批量运行sql语句 2. 代码: import pandas as pddef readExcel(path, excel_file):return pd.read_e…...
【C++】类和对象(三)
目录 一、构造函数补充 1、初始化列表 1.1、初始化列表概念 1.2、初始化列表性质 2、explicit关键字 二、static成员 1、概念及使用 2、性质总结 三、友元 1、友元函数 2、友元类 四、内部类 五、拷贝对象时的一些编译器优化 一、构造函数补充 在《类和对象&#x…...

vTESTstudio - VT System CAPL Functions - General/Trigger Function
前面文章中我们已经介绍了常用的几种板卡的基本信息,那这些板卡该如何去通过软件调用呢?带着这个问题我们开始新的一块内容 - VT系统相关的自动化控制函数介绍,我会按照不同的板卡来分类,对其可控制的函数进行介绍,方便…...

IDEA 快捷键
ctrlD :复制当前行到下一行 ctrlO : 重写当前类的方法 ctrlshiftu : 大小写转化 Alt 上/下 :跳到上一个、下一个函数 Alt 左/右 : 回到上一个、下一个文件 Alt 回车 : 代码修正 Alt Insert : 插入代码 Ctrl Alt L …...

5步掌控外接显示器:MonitorControl解放Mac多屏生产力
5步掌控外接显示器:MonitorControl解放Mac多屏生产力 【免费下载链接】MonitorControl MonitorControl/MonitorControl: MonitorControl 是一款开源的Mac应用程序,允许用户直接控制外部显示器的亮度、对比度和其他设置,而无需依赖原厂提供的软…...

手把手教你用Dify的‘知识库’功能,把热点数据喂给AI,打造专属的赛道咨询顾问
零代码打造AI赛道顾问:Dify知识库赋能自媒体热点挖掘新范式 当信息洪流以每秒百万级的速度冲刷各大内容平台时,真正有价值的趋势洞察往往淹没在数据噪音中。传统解决方案要求从业者掌握SQL查询、数据可视化甚至Python爬虫技能,这种技术门槛让…...

Qwen-Image RTX4090D镜像高算力适配:支持FP16+FlashAttention-2加速Qwen-VL推理
Qwen-Image RTX4090D镜像高算力适配:支持FP16FlashAttention-2加速Qwen-VL推理 1. 镜像概述与核心优势 Qwen-Image定制镜像是专为RTX 4090D高算力环境打造的大模型推理解决方案。基于官方Qwen-Image基础镜像深度优化,预装了完整的CUDA 12.4生态与Qwen-…...

50. 随机数排序
50. 随机数排序 题目描述 生成 N 个 1 到 500 的随机数,你需要删除掉其中重复的数字,即相同的数字只保留一个,把其余相同的数字去掉,然后再把这些数从小到大进行输出。 输入描述 第一行先输入随机整数的个数 N 。 接下来一行包含 …...

如何利用SwinIR智能石油监测技术:图像分析增强的终极指南 [特殊字符]️
如何利用SwinIR智能石油监测技术:图像分析增强的终极指南 🛢️ 【免费下载链接】SwinIR SwinIR: Image Restoration Using Swin Transformer (official repository) 项目地址: https://gitcode.com/gh_mirrors/sw/SwinIR SwinIR智能石油监测技术正…...

eNSP 常用设置整理:接口显示、字体调整与 CLI 窗口模式
在使用 eNSP 做实验时,有几个设置建议提前调整,可以让实验调试更加直观,也能提升使用体验。下面整理几个比较常用的设置。一、显示所有接口在实验拓扑中,如果设备较多,仅通过连线有时很难判断接口对应关系。点击菜单栏…...

涨价4000元!新一代SU7售价21.99万元起;马斯克谈AI竞赛:中国会赢下地球,SpaceX赢下太空;OpenAI CEO发文感谢开发者却引众怒|极客头条
「极客头条」—— 技术人员的新闻圈!CSDN 的读者朋友们好,「极客头条」来啦,快来看今天都有哪些值得我们技术人关注的重要新闻吧。(投稿或寻求报道:zhanghycsdn.net)整理 | 苏宓出品 | CSDN(ID&…...

AI 时代的 Git 进阶术:如何优雅地让多个 Agent 并行开发
前情提要 缘起:AI 并发能力与传统 Git 工作流的碰撞 接触到 git worktree 的直接原因,是在使用 Claude Code 辅助编程时遇到的文件系统层面的物理瓶颈。当试图让 AI Agent 在同一个代码项目中并行开发两个不同的需求时,由于传统的 Git 仓库…...

Qwen3-0.6B-FP8个人知识管理应用:本地笔记问答+思维链可视化复盘
Qwen3-0.6B-FP8个人知识管理应用:本地笔记问答思维链可视化复盘 1. 引言:你的本地AI知识管家 你是不是也遇到过这样的困扰?电脑里存了成百上千篇技术笔记、会议纪要、学习资料,想找某个具体信息时,却像大海捞针。或者…...

手机号逆向查询QQ号:终极完整指南,3分钟快速上手
手机号逆向查询QQ号:终极完整指南,3分钟快速上手 【免费下载链接】phone2qq 项目地址: https://gitcode.com/gh_mirrors/ph/phone2qq 你是否曾经因为忘记QQ号码而无法登录?或者需要验证手机号与QQ号的绑定关系?今天我要介…...