ROS笔记(4)——发布者Publisher与订阅者Subscribe的编程实现
发布者
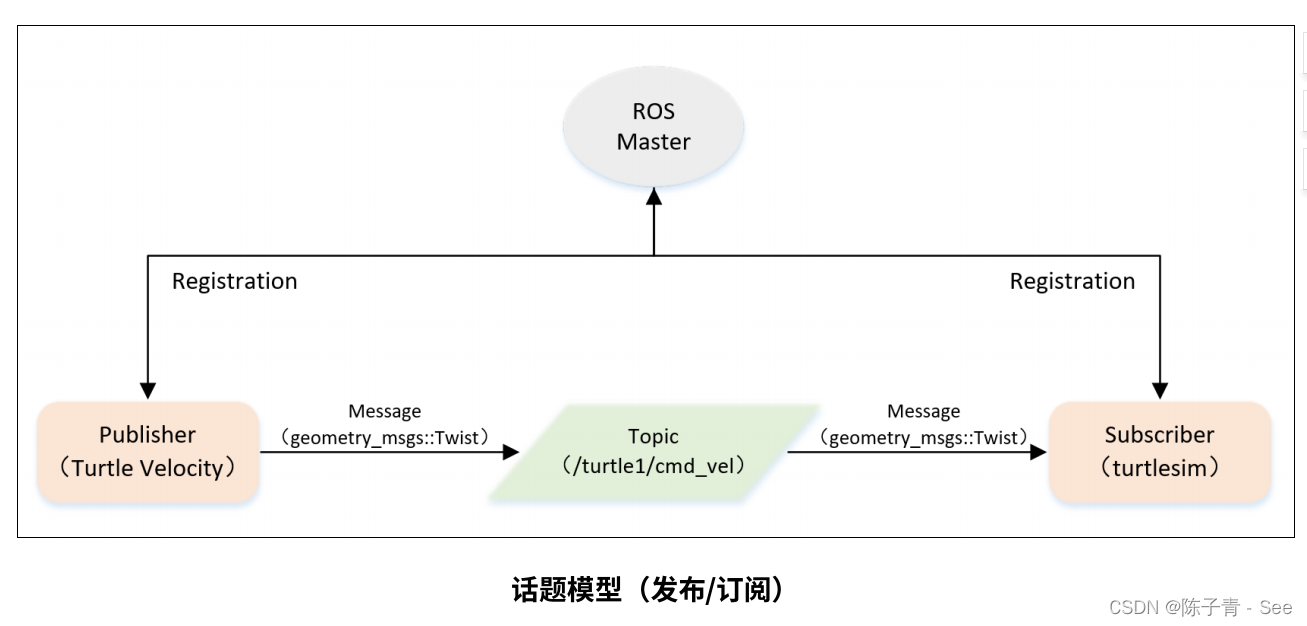
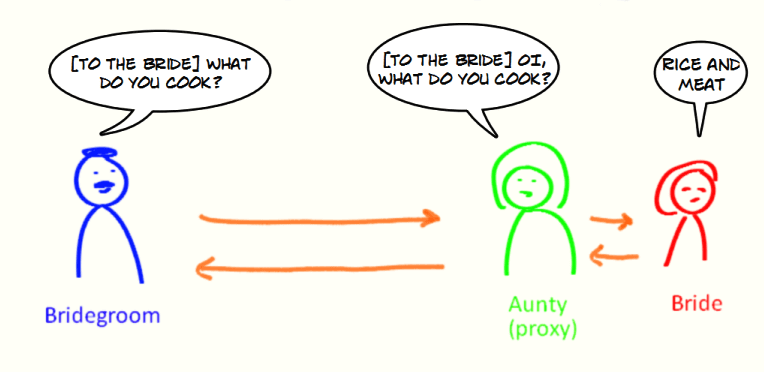
以小海龟的话题消息为例,编程实现发布者通过/turtle1/cmd_vel 话题向 turtlesim节点发送消息,流程如图
步骤一 创建功能包(工作空间为~/catkin_ws/src)
$ cd ~/catkin_ws/src
$ catkin_create_pkg learning_topic roscpp rospy std_msgs geometry_msgs turtlesim
步骤二 编写C++代码,如下
#include<ros/ros.h>
#include<geometry_msgs/Twist.h>int main(int argc, char*argv[])
{/* 初始化ros节点 */ros::init(argc,argv,"velovity_publisher");//创建节点句柄ros::NodeHandle n;//创建一个Publisher,发布名为turtle1/cmd_vel 的topic,消息类型为 geometry_msgs ::Twist.h 队列长度为10 ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist>("turtle1/cmd_vel",10);ros::Rate loop_rate(10);while(ros::ok()){//初始化消息geometry_msgs::Twist vel_msg;vel_msg.linear.x = 0.5;vel_msg.angular.z = 0.2;//发布消息turtle_vel_pub.publish(vel_msg);//打印日志ROS_INFO("velocity_publisher : msg [%0.2f m/s,%0.2f rad/s]",vel_msg.linear.x,vel_msg.angular.z);loop_rate.sleep();}return 0;
}补充项:使用vscode编写C++代码,ROS的头文件引用问题
解决方案如下:
打开您的VS Code项目或工作空间。
在菜单栏中,选择“查看”(View) -> “命令面板”(Command Palette)。
在搜索框中输入“C++: Edit Configuration”,并选择“C++: Edit Configurations (UI)”选项。
在这个UI界面中,您需要添加以下两个路径:
在“编译”(Compile)标签页下,选择“高级”(Advanced)选项。
在“includePath”中添加ROS的include文件夹的路径,如
/opt/ros/<ROS_VERSION>/include。在“browse.path”中添加ROS的lib文件夹的路径,如
/opt/ros/<ROS_VERSION>/lib。单击“确定”(OK)保存您的更改。
步骤三 配置CMakeLists.txt
add_executable(velocity_publisher src/velocity_publisher.cpp)
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})
步骤四 编译运行
$ cd ~/catkin_ws
$ catkin_make
$ source devel/setup.bash
$ roscore
$ rosrun turtlesim turtlesim_node
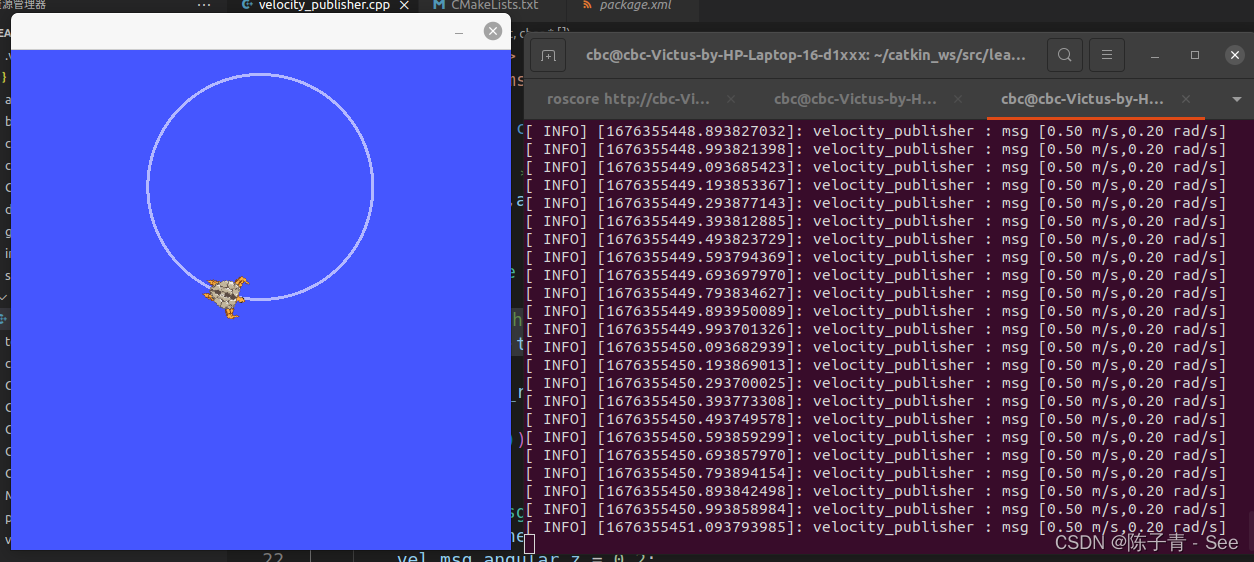
$ rosrun learning_topic velocity_publisher
此时,小海龟接受到消息作圆周运动。
订阅者
订阅者编译与运行方式同上,以订阅/turtle1/pose topic 获取小海龟坐标为例,代码如下
#include<ros/ros.h>
#include"turtlesim/Pose.h"void poseCallback(const turtlesim::Pose::ConstPtr &msg)
{ROS_INFO("pose:x %0.6f, y %0.6f",msg->x,msg->y);
}int main(int argc, char *argv[])
{/* code *///初始化ros节点ros::init(argc,argv,"pose_subscriber");//创建节点句柄ros::NodeHandle n;//创建一个订阅者,订阅名为 /turtle1/pose 的 topic ros::Subscriber pose_sub =n.subscribe("/turtle1/pose",10,poseCallback);//阻塞ros::spin();return 0;
}附录:roscpp C++官方文档 roscpp: roscpp
rospy Python官网文档 http://docs.ros.org/en/melodic/api/rospy/html/
python对应写法
发布者
# 该例程将发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twistimport rospy
from geometry_msgs.msg import Twistdef velocity_publisher():# ROS节点初始化rospy.init_node('velocity_publisher', anonymous=True)# 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10turtle_vel_pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)#设置循环的频率rate = rospy.Rate(10) while not rospy.is_shutdown():# 初始化geometry_msgs::Twist类型的消息vel_msg = Twist()vel_msg.linear.x = 0.5vel_msg.angular.z = 0.2# 发布消息turtle_vel_pub.publish(vel_msg)rospy.loginfo("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]", vel_msg.linear.x, vel_msg.angular.z)# 按照循环频率延时rate.sleep()if __name__ == '__main__':try:velocity_publisher()except rospy.ROSInterruptException:pass订阅者
# 该例程将订阅/turtle1/pose话题,消息类型turtlesim::Poseimport rospy
from turtlesim.msg import Posedef poseCallback(msg):rospy.loginfo("Turtle pose: x:%0.6f, y:%0.6f", msg.x, msg.y)def pose_subscriber():# ROS节点初始化rospy.init_node('pose_subscriber', anonymous=True)# 创建一个Subscriber,订阅名为/turtle1/pose的topic,注册回调函数poseCallbackrospy.Subscriber("/turtle1/pose", Pose, poseCallback)# 循环等待回调函数rospy.spin()if __name__ == '__main__':pose_subscriber()
相关文章:
ROS笔记(4)——发布者Publisher与订阅者Subscribe的编程实现
发布者 以小海龟的话题消息为例,编程实现发布者通过/turtle1/cmd_vel 话题向 turtlesim节点发送消息,流程如图 步骤一 创建功能包(工作空间为~/catkin_ws/src) $ cd ~/catkin_ws/src $ catkin_create_pkg learning_topic roscpp rospy s…...
Linux进程概念(一)
文章目录Linux进程概念(一)1. 冯诺依曼体系结构2. 操作系统(Operator System)2.1 考虑2.2 如何理解操作系统对硬件做管理?2.3 操作系统为什么要对软硬件资源做管理呢?2.4 系统调用和库函数概念2.5 计算机体系结构3. 进程的初步理解…...
Leetcode.1124 表现良好的最长时间段
题目链接 Leetcode.1124 表现良好的最长时间段 Rating : 1908 题目描述 我们认为当员工一天中的工作小时数大于 8 小时的时候,那么这一天就是「劳累的一天」。 所谓「表现良好的时间段」,意味在这段时间内,「劳累的天数」是严格…...

达梦数据库会话、事务阻塞排查步骤
查询阻塞的事务IDselect * from v$trxwait order by wait_time desc;--单机select * from v$dsc_trxwait order by wait_time desc;–DSC集群查询阻塞事务的会话信息select sf_get_session_sql(sess_id),* from v$sessions where trx_id69667;--单机select sf_get_session_sql(…...

sqlServer 2019 开发版(Developer)下载及安装
下载软件 官网只有2022的,2019使用百度网盘进行下载 安装下崽器 选择自定义安装 选择语言、以及安装位置 点击“安装” 安装 SQL Server 可能的故障 以上步骤安装后会弹出以上界面,如果未弹出,手动去安装目录下点击 SETUP.EXE 文件…...
使用Arthas定位问题
功能概述 首先,Arthas的常用功能大概有以下几个: 解决依赖冲突 sc命令:模糊查看当前 JVM 中是否加载了包含关键字的类,以及获取其完全名称。 sc -d 关键字 注意使用 sc -d 命令,获取 classLoaderHash命令:…...
性能测试之tomcat+nginx负载均衡
nginx tomcat 配置准备工作:两个tomcat 执行命令 cp -r apache-tomcat-8.5.56 apache-tomcat-8.5.56_2修改被复制的tomcat2下conf的server.xml 的端口号,不能与tomcat1的端口号重复,不然会启动报错 ,一台电脑上想要启动多个tomcat,…...
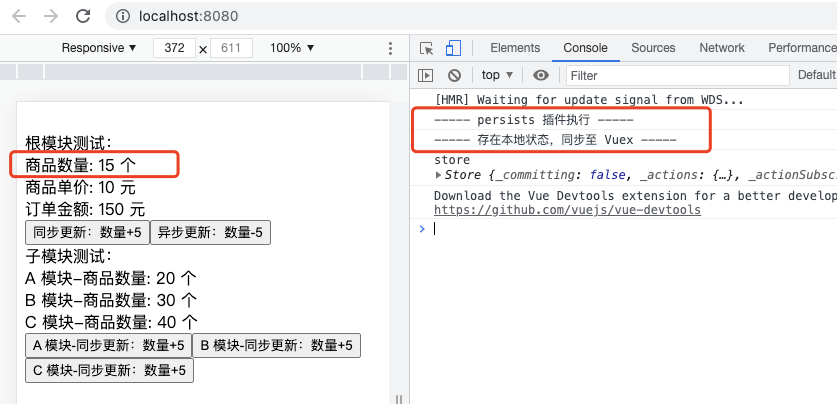
【手写 Vuex 源码】第十一篇 - Vuex 插件的开发
一,前言 上一篇,主要介绍了 Vuex-namespaced 命名空间的实现,主要涉及以下几个点: 命名空间的介绍和使用;命名空间的逻辑分析与代码实现;命名空间核心流程梳理; 本篇,继续介绍 Vu…...
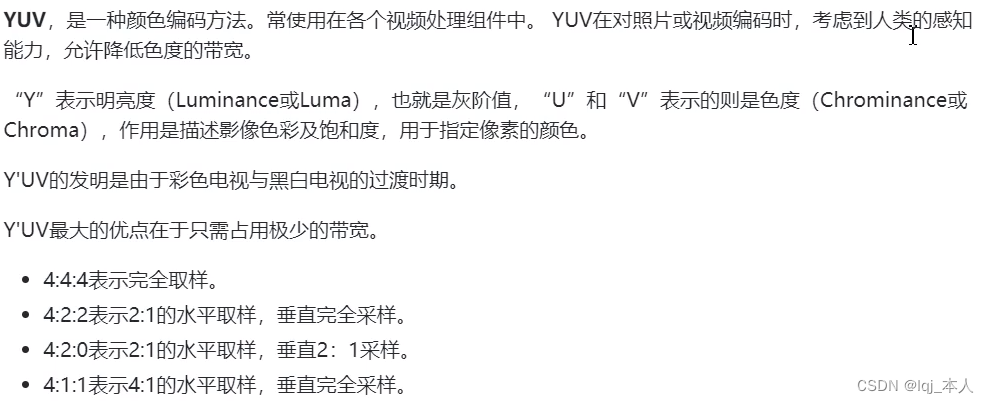
opencv基础知识和绘图图形
大家好,我是csdn的博主:lqj_本人 这是我的个人博客主页: lqj_本人的博客_CSDN博客-微信小程序,前端,python领域博主lqj_本人擅长微信小程序,前端,python,等方面的知识https://blog.csdn.net/lbcyllqj?spm1011.2415.3001.5343哔哩哔哩欢迎关注…...

15- 决策回归树, 随机森林, 极限森林 (决策树优化) (算法)
1. 决策回归树: from sklearn.tree import DecisionTreeRegressor model DecisionTreeRegressor(criterionmse,max_depth3) model.fit(X,y) # X是40个点 y是一个圆 2. 随机森林 稳定预测: from sklearn.ensemble import RandomForestClassifier # model RandomForestC…...

Flink相关的记录
Flink源码编译首次编译的时候,去除不必要的操作,同时install会把Flink中的module安装到本地仓库,这样依赖当前module的其他组件就无需去远程仓库拉取当前module,节省了时间。mvn clean install -T 4 -DskipTests -Dfast -Dmaven.c…...

配置可视化-基于form-render的无代码配置服务(一)
背景 有些业务场景需要产品或运营去配置JSON数据提供给开发去使用(后面有实际业务场景的说明),原有的业务流程,非开发人员(后面直接以产品指代)把数据交给开发,再由开发去更新JSON数据。对于产…...
Java 代理模式详解
1、代理模式 代理模式是一种比较好理解的设计模式。简单来说就是 我们使用代理对象来代替对真实对象(real object)的访问,这样就可以在不修改原目标对象的前提下,提供额外的功能操作,扩展目标对象的功能。 代理模式的主要作用是扩展目标对象…...
知识付费小程序怎么做_分享知识付费小程序的作用
在线知识付费产业的主要业务逻辑是基于用户的主动学习需求,为其提供以跨领域基础知识与技能为核心的在线知识服务,提升其达到求知目的的效率。公众号和小程序的迅速发展,又为知识付费提供了技术支持,从而促进了行业的进一步发展。…...
14- 决策树算法 (有监督学习) (算法)
决策树是属于有监督机器学习的一种决策树算法实操: from sklearn.tree import DecisionTreeClassifier # 决策树算法 model DecisionTreeClassifier(criterionentropy,max_depthd) model.fit(X_train,y_train)1、决策树概述 决策树是属于有监督机器学习的一种,起源…...

如何编译和运行C++程序?
C 和C语言类似,也要经过编译和链接后才能运行。在《C语言编译器》专题中我们讲到了 VS、Dev C、VC 6.0、Code::Blocks、C-Free、GCC、Xcode 等常见 IDE 或编译器,它们除了可以运行C语言程序,还可以运行 C 程序,步骤是一样的&#…...

Golang 给视频添加背景音乐 | Golang工具
目录 前言 环境依赖 代码 总结 前言 本文提供给视频添加背景音乐,一如既往的实用主义。 主要也是学习一下golang使用ffmpeg工具的方式。 环境依赖 ffmpeg环境安装,可以参考我的另一篇文章:windows ffmpeg安装部署_阿良的博客-CSDN博客 …...

让AI护理医疗:解决卫生系统的痛点
一、引言 1.对医疗领域中AI技术的介绍 随着人工智能的不断发展,它已经成为了各个领域中的重要组成部分。在医疗领域中,AI技术也逐渐发挥着越来越重要的作用。从诊断到治疗,从健康管理到研究,人工智能已经深刻地影响着医疗领域的…...
Windows 离线安装 MySQL 8
目录 1. 下载离线安装包 2. 上传解压 3 配置 my.ini 文件 4 设置系统环境变量 5 安装 MySQL 6 登录 MySQL 客户环境是内网环境,不能访问外网,只能离线安装 MySQL 了。 1. 下载离线安装包 MySQL 离线压缩包官网下载地址:MySQL :: Down…...

【前端攻城狮之vue基础】02路由+嵌套路由+路由query/params传参+路由props配置+replace属性+编程式路由导航+缓存路由组件
路由的基础知识1.路由简介2.路由基本使用3.嵌套路由4.传递路由的query传参# 5.传递路由的params参数6.路由的props传参配置7.路由router-link标签的replace属性8.编程式路由导航9.缓存路由组件1.路由简介 路由是一条条对应的key-value关系,key就是前端地址栏的路径…...

变量 varablie 声明- Rust 变量 let mut 声明与 C/C++ 变量声明对比分析
一、变量声明设计:let 与 mut 的哲学解析 Rust 采用 let 声明变量并通过 mut 显式标记可变性,这种设计体现了语言的核心哲学。以下是深度解析: 1.1 设计理念剖析 安全优先原则:默认不可变强制开发者明确声明意图 let x 5; …...

【杂谈】-递归进化:人工智能的自我改进与监管挑战
递归进化:人工智能的自我改进与监管挑战 文章目录 递归进化:人工智能的自我改进与监管挑战1、自我改进型人工智能的崛起2、人工智能如何挑战人类监管?3、确保人工智能受控的策略4、人类在人工智能发展中的角色5、平衡自主性与控制力6、总结与…...
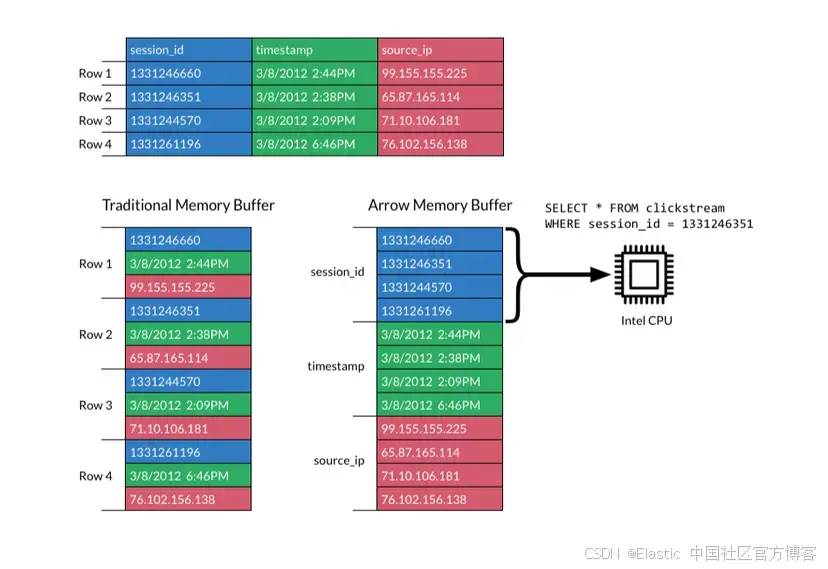
JavaScript 中的 ES|QL:利用 Apache Arrow 工具
作者:来自 Elastic Jeffrey Rengifo 学习如何将 ES|QL 与 JavaScript 的 Apache Arrow 客户端工具一起使用。 想获得 Elastic 认证吗?了解下一期 Elasticsearch Engineer 培训的时间吧! Elasticsearch 拥有众多新功能,助你为自己…...
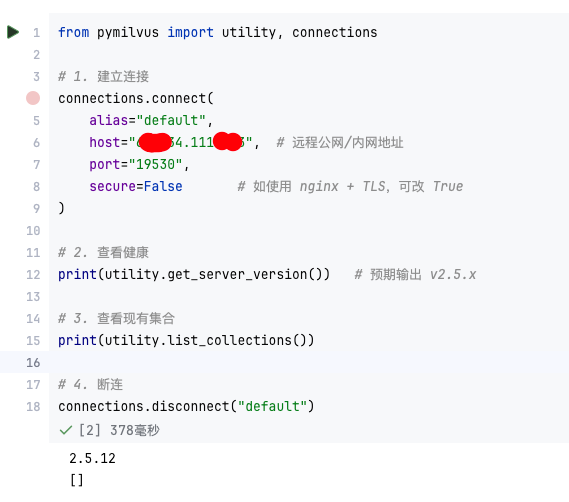
【大模型RAG】Docker 一键部署 Milvus 完整攻略
本文概要 Milvus 2.5 Stand-alone 版可通过 Docker 在几分钟内完成安装;只需暴露 19530(gRPC)与 9091(HTTP/WebUI)两个端口,即可让本地电脑通过 PyMilvus 或浏览器访问远程 Linux 服务器上的 Milvus。下面…...

使用van-uploader 的UI组件,结合vue2如何实现图片上传组件的封装
以下是基于 vant-ui(适配 Vue2 版本 )实现截图中照片上传预览、删除功能,并封装成可复用组件的完整代码,包含样式和逻辑实现,可直接在 Vue2 项目中使用: 1. 封装的图片上传组件 ImageUploader.vue <te…...

浅谈不同二分算法的查找情况
二分算法原理比较简单,但是实际的算法模板却有很多,这一切都源于二分查找问题中的复杂情况和二分算法的边界处理,以下是博主对一些二分算法查找的情况分析。 需要说明的是,以下二分算法都是基于有序序列为升序有序的情况…...

AirSim/Cosys-AirSim 游戏开发(四)外部固定位置监控相机
这个博客介绍了如何通过 settings.json 文件添加一个无人机外的 固定位置监控相机,因为在使用过程中发现 Airsim 对外部监控相机的描述模糊,而 Cosys-Airsim 在官方文档中没有提供外部监控相机设置,最后在源码示例中找到了,所以感…...

Spring AI Chat Memory 实战指南:Local 与 JDBC 存储集成
一个面向 Java 开发者的 Sring-Ai 示例工程项目,该项目是一个 Spring AI 快速入门的样例工程项目,旨在通过一些小的案例展示 Spring AI 框架的核心功能和使用方法。 项目采用模块化设计,每个模块都专注于特定的功能领域,便于学习和…...
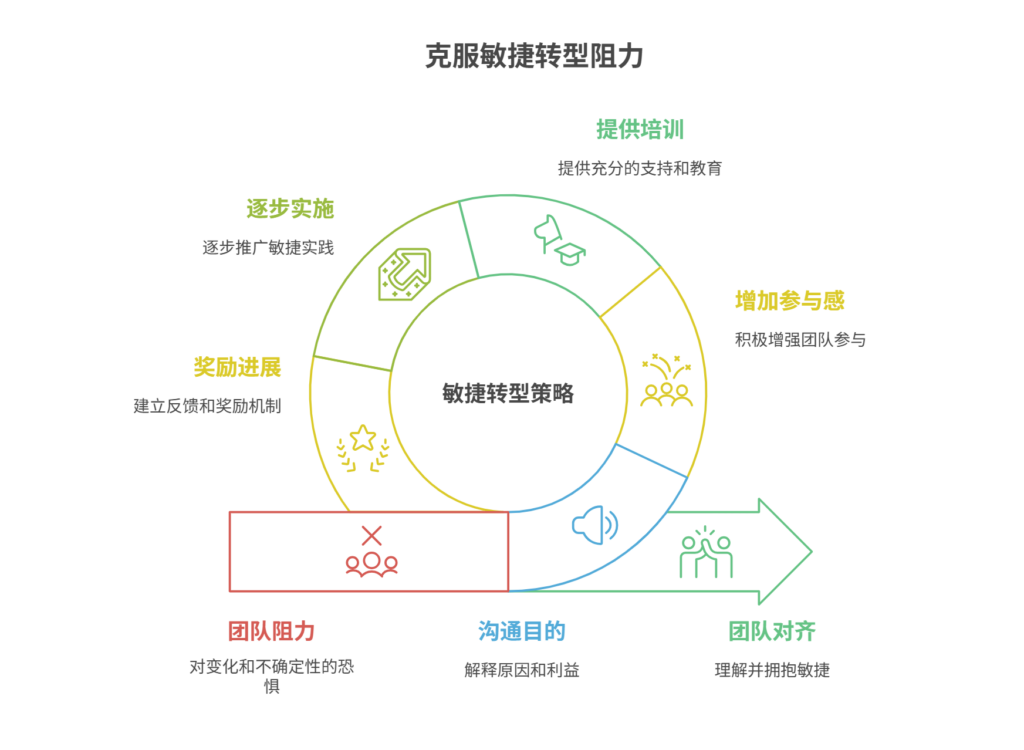
如何应对敏捷转型中的团队阻力
应对敏捷转型中的团队阻力需要明确沟通敏捷转型目的、提升团队参与感、提供充分的培训与支持、逐步推进敏捷实践、建立清晰的奖励和反馈机制。其中,明确沟通敏捷转型目的尤为关键,团队成员只有清晰理解转型背后的原因和利益,才能降低对变化的…...

Kubernetes 网络模型深度解析:Pod IP 与 Service 的负载均衡机制,Service到底是什么?
Pod IP 的本质与特性 Pod IP 的定位 纯端点地址:Pod IP 是分配给 Pod 网络命名空间的真实 IP 地址(如 10.244.1.2)无特殊名称:在 Kubernetes 中,它通常被称为 “Pod IP” 或 “容器 IP”生命周期:与 Pod …...