移动机器人设计与实践课程大纲

MiR移动机器人
参考资料:
图一 西北工业大学-课程平台

图二 清华大学出版社-移动机器人

目前,基本都是双一流大学开设此类课程,并且都是至少3-4+学分,16学时/学分,48-64+学时。
(⊙﹏⊙),难办了。咱这只有(16学时理论+16学时实践,/(ㄒoㄒ)/~~)
课程说明
移动机器人设计与实践课程是一门涵盖了机器人设计、机器人控制与规划、传感器与感知、移动机器人算法等内容的课程。在这门课程中,学生将学习如何设计、建造、编程和测试移动机器人。
课程主要分为以下四个部分:
机器人硬件设计:学生将学习如何选择适合的机器人硬件,如电机、驱动器、传感器等,并了解如何使用CAD软件进行机器人设计。
机器人控制与规划:学生将学习如何使用控制理论来设计机器人的运动控制器,以及如何使用机器人规划算法来实现自主导航。
传感器与感知:学生将学习如何使用各种传感器,如摄像头、激光雷达、超声波传感器等,来实现机器人的感知功能,从而实现避障、定位等功能。
移动机器人算法:学生将学习如何设计和实现各种移动机器人算法,如路径规划、SLAM、机器学习算法等。
在课程的实践环节中,学生将在实验室中亲自动手搭建、编程和测试自己的移动机器人,并通过实践来深入了解课程中的理论知识。
通过这门课程,学生将掌握移动机器人的设计和实现技能,了解机器人领域的最新技术发展,并有机会参与到相关领域的研究和开发工作中。
课程目标
移动机器人设计与实践课程的详细工程认证目标是让学生掌握移动机器人的设计、建模、控制和应用等方面的知识和技能,培养学生的实践能力和团队协作精神。具体目标包括:
理解移动机器人的基本概念、结构和原理,了解常见的移动机器人类型和应用场景;
掌握移动机器人的机械设计和电气控制,能够使用CAD软件设计和优化机器人结构;
学习移动机器人的传感器技术和数据处理方法,能够利用传感器获取环境信息并做出相应的决策;
掌握移动机器人的运动规划和路径规划算法,能够实现机器人的自主导航和避障;
学习移动机器人的视觉技术和图像处理算法,能够利用相机获取图像信息并做出相应的决策;
掌握移动机器人的控制方法和程序设计,能够编写控制程序并实现机器人的运动控制;
能够进行移动机器人的系统集成和调试,实现移动机器人的完整功能;
具备团队协作精神和实践能力,能够独立或协作完成移动机器人项目的设计、实现和测试。
通过学习移动机器人设计与实践课程,学生可以全面掌握移动机器人的设计和实现方法,具备较强的实践能力和团队合作能力,达到相关工程认证的要求。
教学内容
《移动机器人设计与实践》课程的教学内容通常包括以下七个方面:
机器人基础知识:介绍机器人的定义、分类、结构、控制原理、传感器等基础知识。
控制系统设计:介绍控制系统的组成、设计方法、控制算法等内容,培养学生设计控制系统的能力。
运动控制:介绍机器人的运动控制方式,如PID控制器、位置控制、速度控制等。
视觉系统:介绍视觉系统的原理、算法、实现方法等内容,包括视觉传感器、图像处理、目标检测与跟踪等。
路径规划:介绍路径规划算法、运动规划算法等内容,培养学生在实际应用中设计路径规划系统的能力。
定位与导航:介绍机器人的定位与导航方法,包括惯性导航、全球定位系统(GPS)、激光雷达等。
机器人应用:介绍机器人在工业、医疗、服务、教育等领域的应用,并鼓励学生设计并实现自己的机器人应用项目。
以上是《移动机器人设计与实践》课程的一般教学内容,不同学校和教师可能会根据实际情况做出一些调整和增减
基本要求
移动机器人设计与实践课程的基本要求通常包括以下内容:
课程简介:介绍课程的目标、内容、学时和学分等基本信息。
前置知识:明确学生需要具备的基础知识和技能,例如机器人技术、控制理论、编程语言等。
课程大纲:详细描述课程的教学内容和学习目标,包括理论和实践环节,以及相关实验和项目的要求。
教材和参考书目:推荐适合本课程的教材和参考书目。
实验与项目:安排实验和项目来巩固理论知识和提高实践能力,例如使用ROS平台控制移动机器人、机器人自主导航等。
评估方式:说明考核方式和标准,包括作业、实验报告、项目成果、期中期末考试等。
教学方法:根据课程内容和目标,采用适合的教学方法和手段,如讲授、案例分析、讨论、实验等。
实验室与设备:为学生提供必要的实验室和设备,保障实验和项目的顺利进行。
教师要求:要求授课教师具备相关专业背景和实践经验,能够有效地传授知识和指导实践。
以上是移动机器人设计与实践课程的基本要求,不同学校和教师可能会有所差异,具体以实际情况为准。
学时分配
移动机器人设计与实践课程通常需要60-70个学时左右,课时分配如下(实际只有32/(ㄒoㄒ)/~~):
移动机器人导论: 2-3学时
机器人硬件平台介绍: 5-6学时
机器人底盘与电机控制: 10-12学时
传感器与感知技术: 8-10学时
建图与定位技术: 10-12学时
路径规划与运动控制: 10-12学时
机器人应用与案例分析: 8-10学时
此外,还需要适当安排实验课时间,让学生通过实践操作来深入理解移动机器人的设计与实践
实践教学环节
移动机器人设计与实践课程的实践教学环节一般包括以下内容:
硬件介绍:介绍移动机器人的硬件组成和基本原理,包括电机、传感器、控制器等。
软件编程:教授移动机器人的控制程序编写,学习使用编程语言和开发环境,如Python、ROS等。
机器人组装:学生通过组装机器人,了解机器人硬件组成和构造,培养实际动手能力。
机器人控制:通过编写控制程序,学习如何控制机器人进行移动、定位、避障等操作。
机器人感知:介绍机器人传感器的种类和原理,学习如何利用传感器获取环境信息,并进行实时感知。
机器人应用:通过案例介绍,学习机器人在不同领域的应用,如医疗、教育、服务等。
以上是移动机器人设计与实践课程一般的实践教学环节,通过这些实践环节的学习,学生能够掌握移动机器人的基本原理和控制方法,并具备一定的机器人设计与应用能力
教学管理
移动机器人设计与实践课程是一门涉及机器人设计、控制与应用的课程。该课程通常分为理论教学和实践操作两部分。
在理论教学方面,课程将介绍机器人的结构与组成、控制方法、传感器与算法等基础知识。学生将学习机器人的控制系统、运动学与动力学分析等基本理论,并了解到机器人应用领域的最新研究进展。
在实践操作方面,学生将进行实验室实践,设计并搭建基本的移动机器人系统。学生将学习如何使用机器人硬件,如电机、传感器、控制板等,来构建一个完整的机器人系统。在实验室实践中,学生将进行机器人运动控制、传感器数据采集与处理、路径规划与导航等实际操作,通过实践操作来巩固理论知识。
该课程的教学管理方面,老师将组织授课和实验实践,布置作业与实验报告,进行学生的考试与评估等教学管理工作。同时,老师还将提供相关的学习资源,如教材、实验手册、课程资料等,以帮助学生更好地学习和掌握相关知识
考核方法
移动机器人设计与实践课程的考核方法可能因不同学校、不同老师的教学习惯而有所不同,但以下是一些可能的考核方式:
作业:老师可能会布置一些设计、编程、仿真等方面的作业,学生需要在规定时间内完成并提交。作业可能会有不同的难度,有的可能需要花费较长时间完成。
项目:学生可能需要组队完成一个移动机器人设计项目,包括设计、制造、编程、测试等环节。项目可能需要跨学期进行,要求学生在一定的时间内完成不同的阶段性任务。
实验报告:学生可能需要在实验室里进行移动机器人相关的实验,例如传感器调试、运动控制、导航等等,完成后需要撰写实验报告。
期末考试:学生可能需要参加一场考试,考察他们对移动机器人设计与实践课程的理解程度。考试内容可能包括选择题、填空题、计算题、简答题等等。
除此之外,老师还可能会根据学生的课堂表现、讨论参与度等因素对学生进行综合评价,最终得出学生的总成绩。
综合chatgpt和实际情况的大纲后续给出。
相关文章:
移动机器人设计与实践课程大纲
MiR移动机器人参考资料:图一 西北工业大学-课程平台图二 清华大学出版社-移动机器人目前,基本都是双一流大学开设此类课程,并且都是至少3-4学分,16学时/学分,48-64学时。(⊙﹏⊙),难办了。咱这只有…...
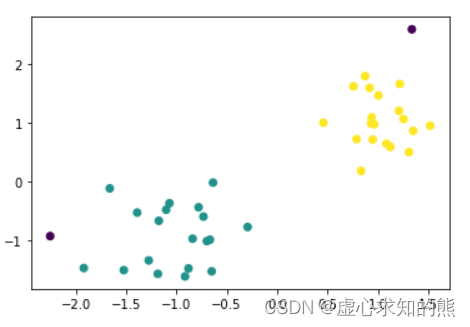
Lesson 7.2 Mini Batch K-Means与DBSCAN密度聚类
文章目录一、Mini Batch K-Means 算法原理与实现二、DBSCAN 密度聚类基本原理与实践1. K-Means 聚类算法的算法特性2. DBSCAN 密度聚类基本原理3. DBSCAN 密度聚类的 sklearn 实现除了 K-Means 快速聚类意外,还有两种常用的聚类算法。(1) 是能…...

11.Dockerfile最佳实践
Dockerfile 最佳实践 Docker官方关于Dockerfile最佳实践原文链接地址:https://docs.docker.com/develop/develop-images/dockerfile_best-practices/ Docker 可以通过从 Dockerfile 包含所有命令的文本文件中读取指令自动构建镜像,以便构建给定镜像。 …...
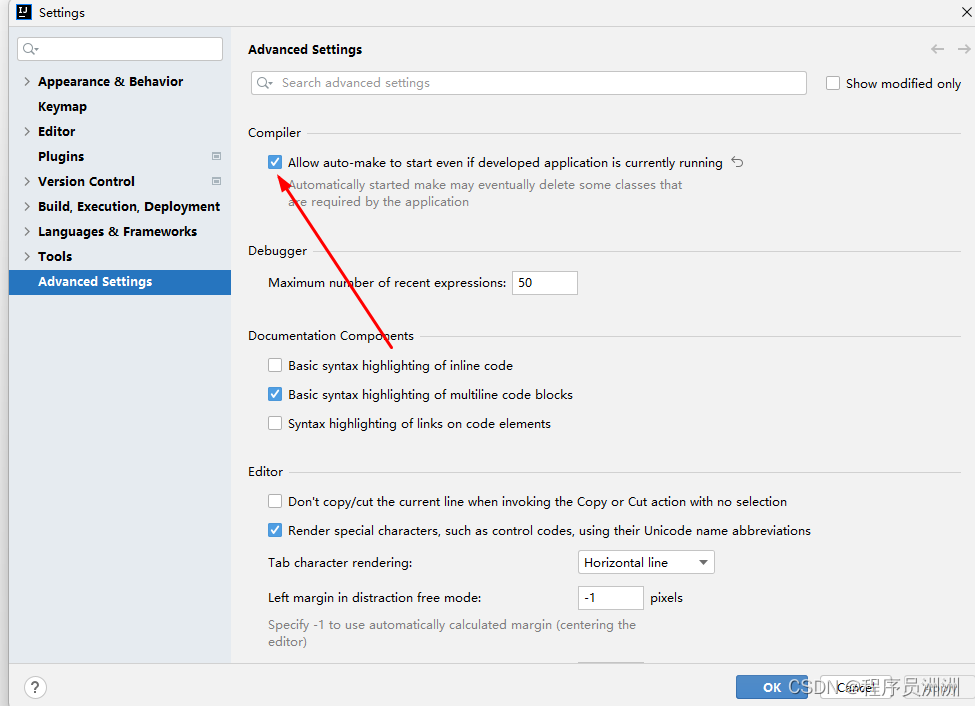
【企业云端全栈开发实践-1】项目介绍及环境准备、Spring Boot快速上手
本节目录一、 项目内容介绍二、Maven介绍2.1 Maven作用2.2 Maven依赖2.3 本地仓库配置三、Spring Boot快速上手3.1 Spring Boot特点3.2 遇到的Bug:spring-boot-maven-plugin3.3 遇到的Bug2:找不到Getmapping四、开发环境热部署一、 项目内容介绍 本课程…...
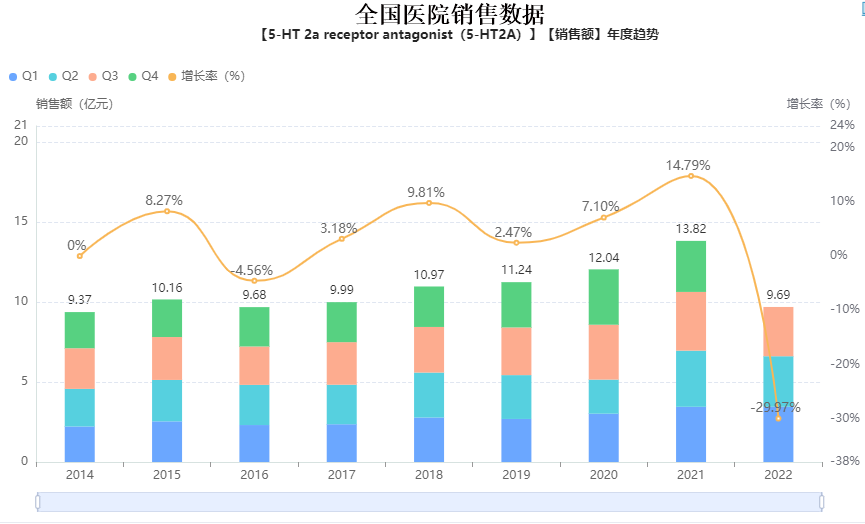
5-HT2A靶向药物|适应症|市场销售-上市药品前景分析
据世界卫生组织称,抑郁症是一种多因素疾病,影响全球约3.5 亿人。中枢神经系统最广泛的单胺 - 血清素 (5-HT) 被认为在这种情况的病理机制中起着至关重要的作用,并且神经递质的重要性被“血清素假说”提升,将抑郁症的存在联系起来 …...
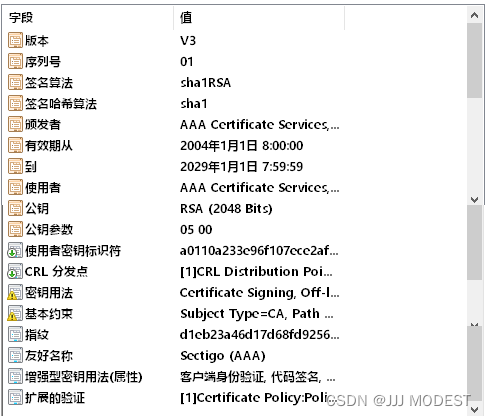
HTTPS协议原理---详解
目录 一、HTTPS 1.加密与解密 2.我们为什么要加密? 3.常见加密方式 ①对称加密 ②非对称加密 4.数据摘要 5.数字签名 二、HTTPS的加密方案 1.只是用对称加密 2.只使用非对称加密 3.双方都使用非对称加密 4.非对称加密+对称加密 中间人攻…...
Pytest学习笔记
Pytest学习笔记 1、介绍 1.1、单元测试 单元测试是指在软件开发当中,针对软件的最小单位(函数,方法)进行正确性的检查测试 1.2、单元测试框架 测试发现:从多个py文件里面去找到我们测试用例测试执行:按…...
Fuzz概述
文章目录AFL一些概念插桩与覆盖率边和块覆盖率afl自实现劫持汇编器clang内置覆盖率反馈与引导变异遗传算法fork server机制AFL调试准备AFL一些概念 插桩与覆盖率 边和块 首先,要明白边和块的定义 正方形的就是块,箭头表示边,边表示程序执行…...
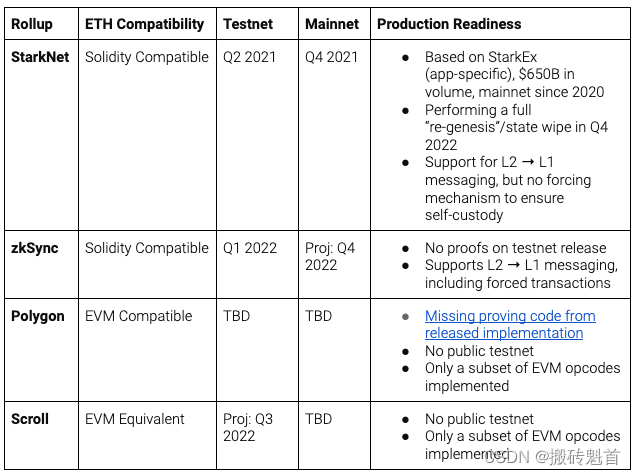
区块链知识系列 - 系统学习EVM(四)-zkEVM
区块链知识系列 - 系统学习EVM(一) 区块链知识系列 - 系统学习EVM(二) 区块链知识系列 - 系统学习EVM(三) 今天我们来聊聊 zkEVM、EVM 兼容性 和 Rollup 是什么? 1. 什么是 Rollup rollup顾名思义,就是把一堆交易卷(rollup)起来…...

Leetcode.2341 数组能形成多少数对
题目链接 Leetcode.2341 数组能形成多少数对 Rating : 1185 题目描述 给你一个下标从 0 开始的整数数组 nums。在一步操作中,你可以执行以下步骤: 从 nums选出 两个 相等的 整数从 nums中移除这两个整数,形成一个 数对 请你在 nums上多次执…...

C++复习笔记10
1. list是可以在常数范围内在任意位置进行插入和删除的序列式容器,并且该容器可以前后双向迭代。 2. list的底层是双向链表结构,双向链表中每个元素存储在互不相关的独立节点中,在节点中通过指针指向其前一个元素和后一个元素。 3. list与for…...
leaflet 纯CSS的marker标记,不用图片来表示(072)
第072个 点击查看专栏目录 本示例的目的是介绍演示如何在vue+leaflet中使用纯CSS来打造marker的标记。这里用到的是L.divIcon来引用CSS来构造新icon,然后在marker的属性中引用。 这里必须要注意的是css需要是全局性质的,不能被scoped转义为其他随机的css。 直接复制下面的 v…...
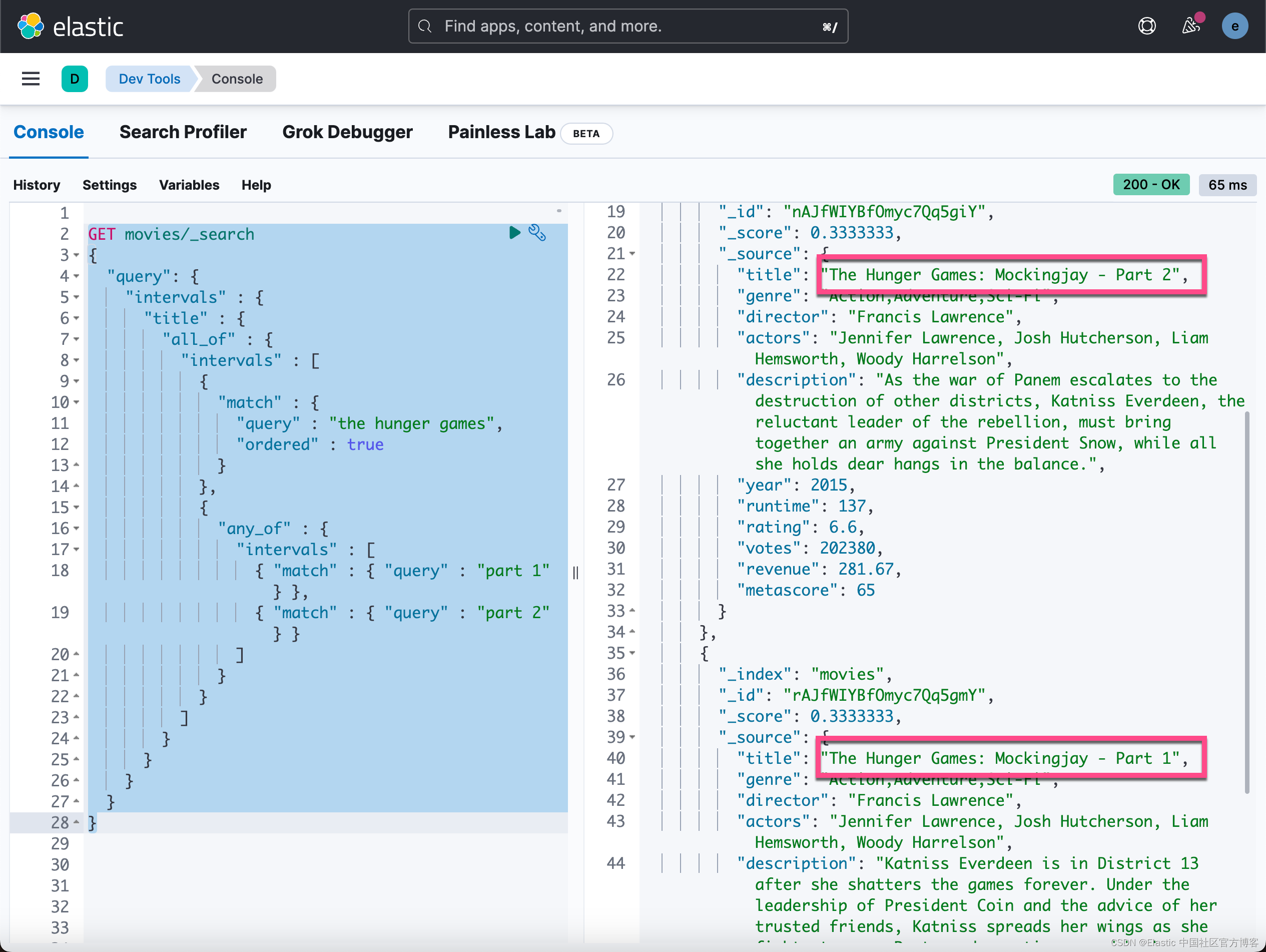
Elasticsearch:使用 intervals query - 根据匹配项的顺序和接近度返回文档
Intervals query 根据匹配项的顺序和接近度返回文档。Intervals 查询使用匹配规则,由一小组定义构成。 然后将这些规则应用于指定字段中的术语。 这些定义产生跨越文本正文中的术语的最小间隔序列。 这些间隔可以通过父源进一步组合和过滤。 上述描述有点费解。我…...
无法决定博客主题的人必看!如何选择类型和推荐的 5 种选择
是否有人不能迈出第一步,因为博客的类型还没有决定?有些人在出发时应该行动,而不是思考,但让我们冷静下来,仔细想想。博客的难度因流派而异,这在很大程度上决定了随后的发展。因此,在选择博客流…...
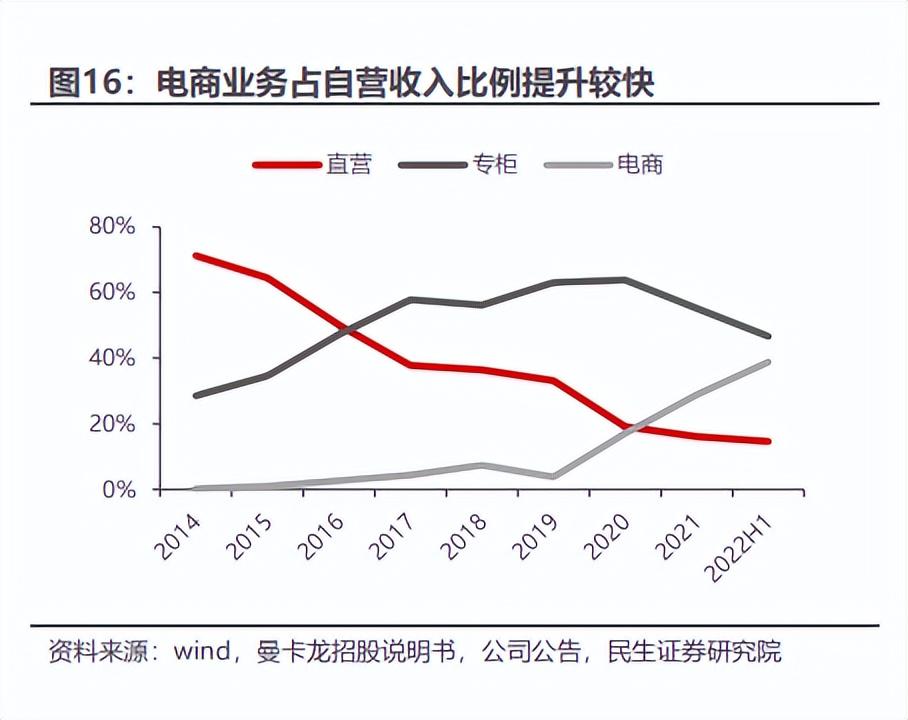
数字化转型的成功模版,珠宝龙头曼卡龙做对了什么?
2月11日,曼卡龙(300945.SZ)发布2022年业绩快报,报告期内,公司实现营业收入16.11亿元,同比增长28.63%。来源:曼卡龙2022年度业绩快报曼卡龙能在2022年实现营收增长尤为不易。2022年受疫情影响&am…...

转换矩阵、平移矩阵、旋转矩阵关系以及python实现旋转矩阵、四元数、欧拉角之间转换
文章目录1. 转换矩阵、平移矩阵、旋转矩阵之间的关系2. 缩放变换、平移变换和旋转变换2. python实现旋转矩阵、四元数、欧拉角互相转化由于在平时总是或多或少的遇到平移旋转的问题,每次都是现查资料,然后查了忘,忘了继续查,这次弄…...
中国地图航线图(echarjs)
1、以上为效果图 需要jq、echarjs、china.json三个文件支持。以上 2、具体代码 DOM部分 <!-- 服务范围 GO--> <div class"m-maps"><div id"main" style"width:1400px;height: 800px; margin: 0 auto;"> </div> <!-…...
Python正则表达式中group与groups的用法详解
本文主要介绍了Python正则表达式中group与groups的用法详解,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友们下面随着小编来一起学习学习吧目录在Python中,正则表达式的group和groups方…...

c++练习题7
1.下列运算符中优先级最高的是 A)> B) C) && D)! 2.以下关于运算符优先级的描述中,正确的是 。 A)!(逻辑非&#x…...

MySQL学习
目录1、数据库定义基本语句(1)数据库操作(2)数据表操作2.数据库操作SQL语句(1)插入数据(2)更新语句(3)删除数据3.数据库查询语句(1)基…...
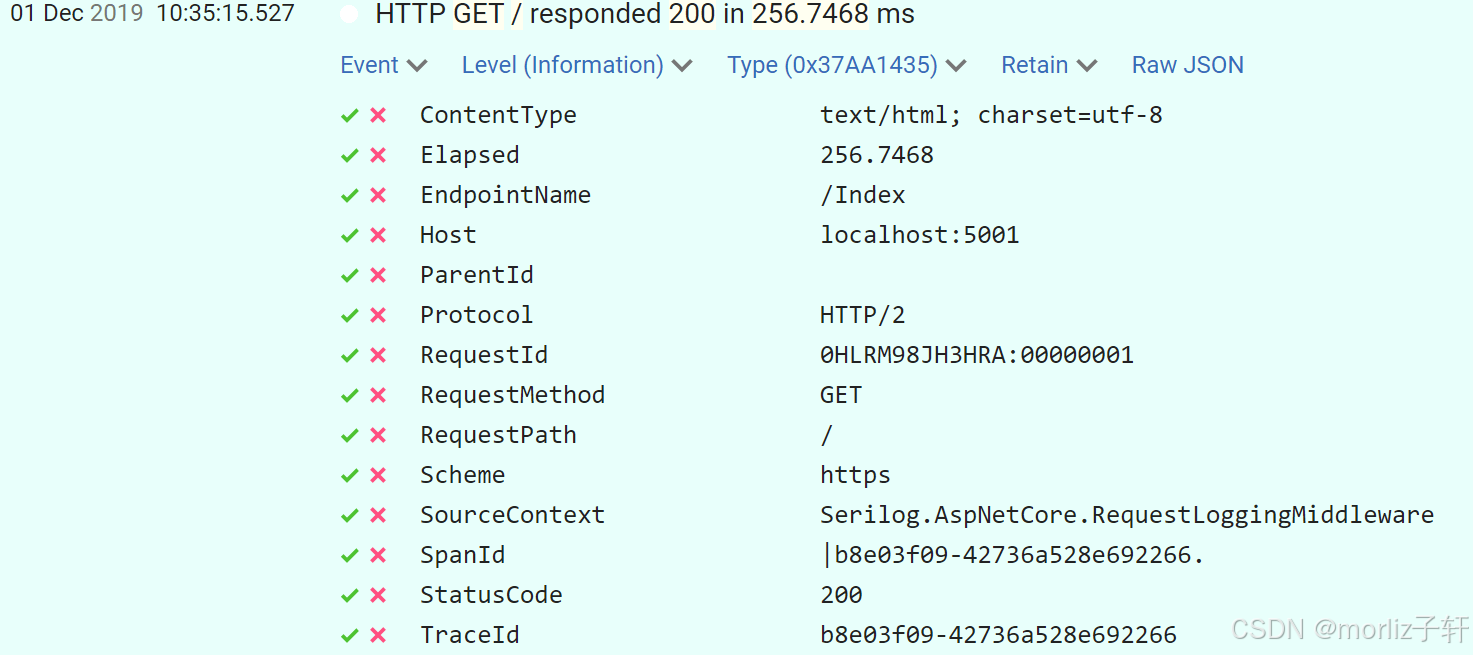
深入浅出Asp.Net Core MVC应用开发系列-AspNetCore中的日志记录
ASP.NET Core 是一个跨平台的开源框架,用于在 Windows、macOS 或 Linux 上生成基于云的新式 Web 应用。 ASP.NET Core 中的日志记录 .NET 通过 ILogger API 支持高性能结构化日志记录,以帮助监视应用程序行为和诊断问题。 可以通过配置不同的记录提供程…...
【配置 YOLOX 用于按目录分类的图片数据集】
现在的图标点选越来越多,如何一步解决,采用 YOLOX 目标检测模式则可以轻松解决 要在 YOLOX 中使用按目录分类的图片数据集(每个目录代表一个类别,目录下是该类别的所有图片),你需要进行以下配置步骤&#x…...

SiFli 52把Imagie图片,Font字体资源放在指定位置,编译成指定img.bin和font.bin的问题
分区配置 (ptab.json) img 属性介绍: img 属性指定分区存放的 image 名称,指定的 image 名称必须是当前工程生成的 binary 。 如果 binary 有多个文件,则以 proj_name:binary_name 格式指定文件名, proj_name 为工程 名&…...
算法:模拟
1.替换所有的问号 1576. 替换所有的问号 - 力扣(LeetCode) 遍历字符串:通过外层循环逐一检查每个字符。遇到 ? 时处理: 内层循环遍历小写字母(a 到 z)。对每个字母检查是否满足: 与…...
【C++特殊工具与技术】优化内存分配(一):C++中的内存分配
目录 一、C 内存的基本概念 1.1 内存的物理与逻辑结构 1.2 C 程序的内存区域划分 二、栈内存分配 2.1 栈内存的特点 2.2 栈内存分配示例 三、堆内存分配 3.1 new和delete操作符 4.2 内存泄漏与悬空指针问题 4.3 new和delete的重载 四、智能指针…...
CSS | transition 和 transform的用处和区别
省流总结: transform用于变换/变形,transition是动画控制器 transform 用来对元素进行变形,常见的操作如下,它是立即生效的样式变形属性。 旋转 rotate(角度deg)、平移 translateX(像素px)、缩放 scale(倍数)、倾斜 skewX(角度…...
计算机基础知识解析:从应用到架构的全面拆解
目录 前言 1、 计算机的应用领域:无处不在的数字助手 2、 计算机的进化史:从算盘到量子计算 3、计算机的分类:不止 “台式机和笔记本” 4、计算机的组件:硬件与软件的协同 4.1 硬件:五大核心部件 4.2 软件&#…...

4. TypeScript 类型推断与类型组合
一、类型推断 (一) 什么是类型推断 TypeScript 的类型推断会根据变量、函数返回值、对象和数组的赋值和使用方式,自动确定它们的类型。 这一特性减少了显式类型注解的需要,在保持类型安全的同时简化了代码。通过分析上下文和初始值,TypeSc…...
通过 Ansible 在 Windows 2022 上安装 IIS Web 服务器
拓扑结构 这是一个用于通过 Ansible 部署 IIS Web 服务器的实验室拓扑。 前提条件: 在被管理的节点上安装WinRm 准备一张自签名的证书 开放防火墙入站tcp 5985 5986端口 准备自签名证书 PS C:\Users\azureuser> $cert New-SelfSignedCertificate -DnsName &…...

离线语音识别方案分析
随着人工智能技术的不断发展,语音识别技术也得到了广泛的应用,从智能家居到车载系统,语音识别正在改变我们与设备的交互方式。尤其是离线语音识别,由于其在没有网络连接的情况下仍然能提供稳定、准确的语音处理能力,广…...