基于树莓派的智能家居项目整理
一、功能介绍
二、设计框图
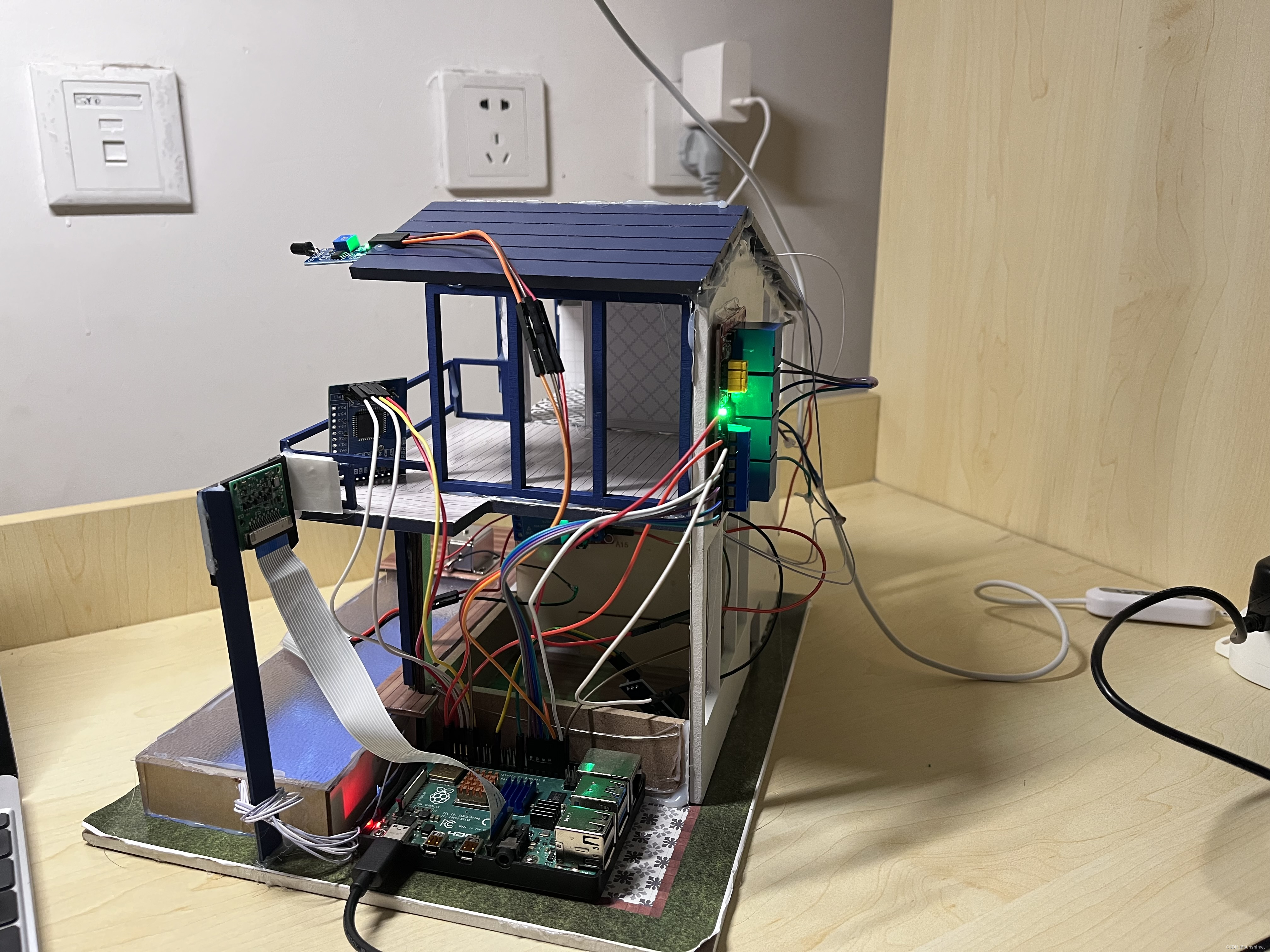
三、实物展示
四、程序
一、功能介绍
硬件:树莓派3B、LD3320语音识别模块、pi 摄像头、继电器组、小灯、火焰传感器、蜂鸣器、电 磁锁
项目框架:
采用了简单工厂模式的一个设计方式。稳定,拓展性更强,在C语言中,因为没有接口、类这一说法,所以这里采用了结构体来“等效替换”。有四个灯,所以我创建了四个灯控制.c程序。每一个程序文件中,都有一个设备结构体,每个程序文件的函数实现方法不同,当有新设备进入只需要在创建一个.c文件,改变函数实现方法即可。初始化的时候,通过链表将各个模块连接起来(头插法)。在要使用某个模块时,只需要使用链表遍历,找到所需模块去调用功能
具体功能是:
1、可通过ld3320语音模块的口令模式,口令+具体控制,通过串口把控制指令传给树莓派,来控 制客厅、餐厅、二楼、浴室的灯,以及 人脸识别功能。
2、也可以通过socket客户端来发指令来控制灯的开关,电磁锁
3、火灾报警,当火焰传感器检测到火焰的时候,蜂鸣器会报警。
4、视频监控采用开源mjpg-Streamer来实现的,程序执行时创建一个视频监控的线程,用system函数调用启动脚本运行,监控画面可在http://172.20.10.8:8080去看到
5、人脸识别开锁,人脸识别功能是使用的翔云平台的人脸识别解决方案,需要安装libcurl 和 openSSl库来支持https协议,通过系统调用wget +http://172.20.10.8:8080/?action=snapshot -O ./huyu1.jpg 指令到树莓派的监控页面"去截取一帧保存到本地,获取图片的base64编码,工程文件夹下也有一张照片,huyu.jpg格式,相当于采集的人脸。也是获取图片的base64编码,通过sprintf函数将访问翔云需要的两张图片的base64编码与Key、secret、typeId、format拼接在一起,通过https协议去访问翔云平台, 识别成功后会将识别结果返回,通过回调函数readData将返回的字符串读到readBuff里,通过strstr去readbuff里找有没有字符’是’,如果识别成功就去控制电磁锁打开。
二、设计框图
四、程序
control Device
#include <wiringPi.h>
#include <stdio.h>
#include <stdlib.h>struct Devices
{char name[128];int status;int pinName;int (*open)(int pinName);int (*close)(int pinName);int (*deviceInit)(int pinName);void (*justDoOnce)();char* (*getFace)();char* (*getPicFromOCRBase64)(); int (*readStaus)(int pinName);int (*changeStatus)(int status);struct Devices* next;
};struct Devices* addbathroomLink(struct Devices* head);
struct Devices* addupstairLink(struct Devices* head);
struct Devices* addrestaurantLink(struct Devices* head);
struct Devices* addlivingroomLink(struct Devices* head);
struct Devices* addcameraToDeviceLink(struct Devices *head);
struct Devices* addfiretoLink(struct Devices* head);
struct Devices* addBeepToDeviceLink(struct Devices *phead) ;inoutcommand
#include <stdlib.h>
#include <wiringPi.h>struct inputcommander{char commandName[128]; char deviceName[128];char command[32];int (*init)(struct inputcommander*voicer ,char* ipAddress,char* port);int (*getCommand)(struct inputcommander* voicer);char log[1024];int fd;char port[12];char ipAddress[32];int sfd;struct inputcommander*next;};struct inputcommander* addvoiceControlInputLink(struct inputcommander* phead);struct inputcommander* addsockControlLink(struct inputcommander* phead);bathroom
#include "controDevice.h"int bathroomLightopen(int pinName){digitalWrite(pinName,LOW);}int bathroomLightclose(int pinName){digitalWrite(pinName,HIGH);}int bathroomLightInit(int pinName){pinMode(pinName,OUTPUT);digitalWrite(pinName,HIGH);
}struct Devices bathroomLight = {.name="bathroomLight",.pinName=22, .open=bathroomLightopen,.close=bathroomLightclose,.deviceInit=bathroomLightInit};struct Devices* addbathroomLink(struct Devices* head){if(head==NULL){return &bathroomLight;}else{bathroomLight.next=head;head=&bathroomLight;return head;}
}livinglight
#include "controDevice.h"int livingroomLightopen(int pinName){digitalWrite(pinName,LOW);}int livingroomLightclose(int pinName){digitalWrite(pinName,HIGH);}int livingroomLightInit(int pinName){pinMode(pinName,OUTPUT);digitalWrite(pinName,HIGH);}int livingroomLightChangestatus(int status){}struct Devices livingroomLight = {.name="livingroomLight",.pinName=24, .open=livingroomLightopen,.close=livingroomLightclose,.deviceInit=livingroomLightInit,.changeStatus=livingroomLightChangestatus
};struct Devices* addlivingroomLink(struct Devices* head){if(head==NULL){return &livingroomLight;}else{livingroomLight.next=head;head=&livingroomLight;return head;}
}restraut light
#include "controDevice.h"int restaurantLightopen(int pinName){digitalWrite(pinName,LOW);}int restaurantLightclose(int pinName){digitalWrite(pinName,HIGH);}int restaurantLighttInit(int pinName){pinMode(pinName,OUTPUT);digitalWrite(pinName,HIGH);}int restaurantLightChangestatus(int status){}struct Devices restaurantLight = {.name="restaurantLight",.pinName=23, .open=restaurantLightopen,.close=restaurantLightclose,.deviceInit=restaurantLighttInit,.changeStatus=restaurantLightChangestatus
};struct Devices* addrestaurantLink(struct Devices* head){if(head==NULL){return &restaurantLight;}else{restaurantLight.next=head;head=&restaurantLight;return head;}
}
upstair light
#include "controDevice.h"int upstairLightopen(int pinName){digitalWrite(pinName,LOW);}int upstairLightclose(int pinName){digitalWrite(pinName,HIGH);}int upstairLightInit(int pinName){pinMode(pinName,OUTPUT);digitalWrite(pinName,HIGH);}int upstairLightChangestatus(int status){}struct Devices upstairLight = {.name="upstairLight",.pinName=21, .open=upstairLightopen,.close=upstairLightclose,.deviceInit=upstairLightInit,.changeStatus=upstairLightChangestatus
};struct Devices* addupstairLink(struct Devices* head){if(head==NULL){return &upstairLight;}else{upstairLight.next=head;head=&upstairLight;return head;}
}filre
#include "controDevice.h"int firetoInit(int pinName){ //初始化函数pinMode(pinName,INPUT); //配置引脚为输入引脚digitalWrite(pinName,HIGH); //引脚输出高电平,即默认为关闭状态}int firetostatusread(int pinName){ //读取火焰传感器状态函数return digitalRead(pinName); //读取高低电平,返回0或1}struct Devices fireto = { //火焰传感器设备链表节点.name="fire",.pinName=25, .deviceInit=firetoInit,.readStaus=firetostatusread
};struct Devices* addfiretoLink(struct Devices* head){ //头插法将设备节点加入设备工厂链表函数if(head==NULL){return &fireto;}else{fireto.next=head;head=&fireto;return head;}
}
bee
#include "controDevice.h"int beepInit(int pinName) //初始化函数
{pinMode(pinName,OUTPUT); //配置引脚为输出引脚digitalWrite(pinName,HIGH); //引脚输出高电平,即默认为关闭状态
}int beepOpen(int pinName) //打开蜂鸣器函数
{digitalWrite(pinName,LOW);
}int beepClose(int pinName) //关闭蜂鸣器函数
{digitalWrite(pinName,HIGH);
}struct Devices beep = { //蜂鸣器设备链表节点.name = "beep",.pinName = 7, //树莓派gpio引脚29.deviceInit = beepInit,.open = beepOpen,.close = beepClose
};struct Devices* addBeepToDeviceLink(struct Devices *phead) //头插法将设备节点加入设备工厂链表函数
{if(phead == NULL){return &beep;}else{beep.next = phead;phead = &beep;return phead;}
}camera
#include "controDevice.h"
#include <stdio.h>
#include <unistd.h>
#include <string.h>
#include <stdlib.h>
#include <curl/curl.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <sys/types.h>
#include <unistd.h>
#define SWITCH1 21char ocrRetBuf[1024] = {'\0'};//全局变量,用来接收从OCR后台返回的数据size_t readData1(void *ptr, size_t size, size_t nmemb, void *stream)
//回调函数,把从后台的数据拷贝给ocrRetBuf
{strncpy(ocrRetBuf,ptr,1024);printf("data reviver\n");
}char *getPicFromOCRBase641(char *Filepath)
{int fd;int filelen;char cmd[128]={'\0'};sprintf(cmd,"base64 %s > tmpFile",Filepath);system(cmd);fd=open("./tmpFile",O_RDWR);filelen=lseek(fd,0,SEEK_END);lseek(fd,0,SEEK_SET);char *bufpic=(char *)malloc(filelen+2);memset(bufpic,'\0',filelen+2);read(fd,bufpic,filelen+128);system("rm -rf tmpFile");close(fd);return bufpic;}char*getFace1(){printf("pai zhao zhong\n");system("raspistill -q 5 -t 1 -o pic.jpg");while(access("./pic.jpg",F_OK) != 0); //判断是否拍照完毕printf("paizhao wan bi\n");char* base64BufFaceRec = getPicFromOCRBase641("./pic.jpg");system("rm pic.jpg");return base64BufFaceRec; //返回刚才拍照的base64}void postUrl(){CURL *curl;CURLcode res;//分开定义,然后字符串拼接char* key = "P5bruv7dU4YRH7JHNxuCeb"; //翔云平台购买人脸识别后的keychar* secret = "0c4c02a1161e43bf9de539d6487260c8"; //翔云平台购买人脸识别后的secretint typeId = 21; char* format = "xml";char* base64BufPic1 = getFace1();char* base64BufPic2 = getPicFromOCRBase641("PYD.jpg");int len = strlen(key)+strlen(secret)+strlen(base64BufPic1)+strlen(base64BufPic2)+128;//分配空间不够会导致栈溢出char* postString = (char* )malloc(len);memset(postString,'\0',len);//因为postString是一个指针,不能用sizeof来计算其指向的大小sprintf(postString,"img1=%s&img2=%s&key=%s&secret=%s&typeId=%d&format=%s",base64BufPic1,base64BufPic2,key,secret,typeId,format);//根据平台的传参格式编写curl = curl_easy_init();if(curl){curl_easy_setopt(curl, CURLOPT_POSTFIELDS, postString); //指定post内容,传入参数 curl_easy_setopt(curl, CURLOPT_URL, "https://netocr.com/api/faceliu.do");// 指定urlcurl_easy_setopt(curl, CURLOPT_WRITEFUNCTION,readData1); //回调函数readDate读取返回值res = curl_easy_perform(curl); //类似于状态码printf("OK:%d\n",res);if(strstr(ocrRetBuf,"是") != NULL){ //判断翔云后台返回的字符串中有没有“是”printf("the same person\n");pinMode(SWITCH1,OUTPUT);digitalWrite(SWITCH1,LOW);}else{printf("different person\n");digitalWrite(SWITCH1,HIGH);}curl_easy_cleanup(curl);}}struct Devices camera = {.name = "camera",.justDoOnce = postUrl,.getFace = getFace1,.getPicFromOCRBase64 = getPicFromOCRBase641,//.readData = readData1};struct Devices* addcameraToDeviceLink(struct Devices *head)
{if(head == NULL){return &camera;}else{camera.next = head;head = &camera;}
}socket
#include <wiringSerial.h>
#include <stdio.h>
#include <unistd.h>
#include <stdlib.h>
#include <wiringPi.h>
#include <string.h>
#include <sys/types.h>
#include <sys/socket.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include "inoutCommand.h"int SocketInit(struct inputcommander* Socketlnits,char*ipAddress,char*port){ int s_fd;struct sockaddr_in s_addr;memset(&s_addr,0,sizeof(struct sockaddr_in));s_fd = socket(AF_INET, SOCK_STREAM,0);if(s_fd == -1){perror("socket");exit(-1);}s_addr.sin_family =AF_INET;s_addr.sin_port = htons(atoi(Socketlnits->port));inet_aton(Socketlnits->ipAddress , &s_addr.sin_addr);bind(s_fd , (struct sockaddr*)&s_addr , sizeof(struct sockaddr_in));listen(s_fd,10);printf("socket server Listening >>>\n");Socketlnits->sfd=s_fd;return s_fd;}struct inputcommander socketControl = {.commandName="socketserver",.command={'\0'},.port = "8124",.ipAddress ="192.168.43.165",.init = SocketInit,.log = {'\0'},.next = NULL
};struct inputcommander* addsockControlLink(struct inputcommander* phead){if(phead==NULL){return &socketControl;}else{socketControl.next=phead;phead=&socketControl;return phead;}}voice control
#include "inoutCommand.h"
#include <wiringSerial.h>
#include <stdio.h>
#include <unistd.h>
#include <stdlib.h>
#include <wiringPi.h>
#include <string.h>int voicegetCommand(struct inputcommander* voicer){int nread =0;memset(voicer->command,'\0',sizeof(voicer->command));nread = read(voicer->fd, voicer->command, sizeof(voicer->command));if(nread==0){printf(" voice device read over times\n");}else{return nread;}
}int voiceInit(struct inputcommander* voicer,char*ipAddress,char*port){int fd;if((fd = serialOpen(voicer->deviceName,9600))<0){printf("voicelnit open error\n");return (-1);}printf("voicelnit...contun...\n");voicer->fd=fd;return fd;}struct inputcommander voiceControl = {.commandName="voice",.deviceName="/dev/ttyAMA0",.command={'\0'},.init = voiceInit,.getCommand = voicegetCommand,.log = {'\0'},.next = NULL
};struct inputcommander* addvoiceControlInputLink(struct inputcommander* phead){if(phead==NULL){return &voiceControl;}else{voiceControl.next=phead;phead=&voiceControl;return phead;}
}
main
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include "inoutCommand.h"
#include "controDevice.h"
#include<unistd.h>
#include<pthread.h>
#include<wiringPi.h>
#include<wiringSerial.h>
#include<sys/types.h>
#include<sys/socket.h>
#include<arpa/inet.h>
#include<netinet/in.h>#define SWITCH1 21 //四盏灯对应的引脚
#define SWITCH2 22
#define SWITCH3 23
#define SWITCH4 24
#define SWITCH5 25struct Devices* tem=NULL;
struct inputcommander* commandhead=NULL; struct inputcommander*socketHeadler = NULL;int c_fd;struct Devices* findDeviceByName(char* name,struct Devices* phead){struct Devices*tmp=phead;if(phead==NULL){return NULL;}else{while(tmp!=NULL){if(strcmp(tmp->name,name)==0){return tmp;} tmp=tmp->next;}return NULL;}
}struct inputcommander* findcommandByName(char* name,struct inputcommander* phead){struct inputcommander*tmp=phead;if(phead==NULL){return NULL;}else{while(tmp!=NULL){if(strcmp(tmp->commandName,name)==0){return tmp;} tmp=tmp->next;}return NULL;}
}void *fireAlarmThread(void *data) //“火灾报警器线程”执行的函数
{int status;struct Devices *firetmp = NULL;struct Devices *buztmp = NULL;firetmp = findDeviceByName("fire",tem); //寻找“火焰传感器”链表节点,返回给firetmpbuztmp = findDeviceByName("beep",tem); //寻找“蜂鸣器”链表节点,返回给buztmpwhile(1){status = firetmp->readStaus(firetmp->pinName); //读取“火焰传感器”状态buztmp->deviceInit(buztmp->pinName);if(status == 0){ //检测到火焰或强光源printf("have fire\n");buztmp->open(buztmp->pinName); //打开蜂鸣器delay(1000); //延时1000毫秒=1秒}if(status == 1){ //未检测到火焰、强光源或解除警报buztmp->close(buztmp->pinName); //关闭蜂鸣器}}
}void *cameraThread_func(void* data)//起线程的函数有格式要求
{struct Devices *cameraTemp;cameraTemp = findDeviceByName("camera", tem); //设备都要从工厂里面取出来if(cameraTemp == NULL){ //防止段错误的必需判断,当给指针赋值是,一定要考虑NULL的情况,否则后续操作都是空谈printf("find camera error\n");pthread_exit(NULL); //在线程中不用return}printf("222\n");cameraTemp->justDoOnce(); //调用postUrl函数
}void* read_Thread(void* datas){int n_read;memset(socketHeadler->command,'\0',sizeof(socketHeadler->command));n_read = read(c_fd,socketHeadler->command,sizeof(socketHeadler->command));if(n_read == -1){perror("read");}else if(n_read>0){printf("\n socker read number:%d , contixt:%s\n",n_read,socketHeadler->command);if(strstr(socketHeadler->command,"KS") != NULL){printf("open lock\n");pinMode(SWITCH1,OUTPUT);digitalWrite(SWITCH1,LOW);}if(strstr(socketHeadler->command,"KYS") != NULL){ pinMode(SWITCH2,OUTPUT);digitalWrite(SWITCH2,LOW);}if(strstr(socketHeadler->command,"GYS") != NULL){digitalWrite(SWITCH2,HIGH);}if(strstr(socketHeadler->command,"KKT") != NULL){ //对socket收到的指令进行分析,并执行对应的操作pinMode(SWITCH4,OUTPUT);digitalWrite(SWITCH4,LOW);}if(strstr(socketHeadler->command,"GKT") != NULL){digitalWrite(SWITCH4,HIGH);}if(strstr(socketHeadler->command,"KCT") != NULL){ //对socket收到的指令进行分析,并执行对应的操作pinMode(SWITCH3,OUTPUT);digitalWrite(SWITCH3,LOW);}if(strstr(socketHeadler->command,"GCT") != NULL){digitalWrite(SWITCH3,HIGH);}if(strstr(socketHeadler->command,"GS") != NULL){digitalWrite(SWITCH1,HIGH);}else{printf("Input error! \n");}}
}void* voiceThread(void* datas){int nread;struct inputcommander* voiceHead=findcommandByName("voice",commandhead);if(voiceHead==NULL){printf(" no voice \n");pthread_exit(NULL);}else{printf("%s find voice \n",voiceHead->commandName);if(voiceHead->init(voiceHead, NULL ,NULL)<0){printf("voice init error!!!\n");pthread_exit(NULL);}else{printf(" %s init successful!\n",voiceHead->commandName);}while(1){nread = voiceHead->getCommand(voiceHead);if(nread == 0){printf("waiting...\n");}else{printf("do divece control : %s\n",voiceHead->command);if(strstr(voiceHead->command,"XJ") != NULL){ //一级指令,printf("收到:\n"); }else if(strstr(voiceHead->command,"KYSD") != NULL){ pinMode(SWITCH2,OUTPUT);digitalWrite(SWITCH2,LOW);}else if(strstr(voiceHead->command,"GYSD") != NULL){digitalWrite(SWITCH2,HIGH);}else if(strstr(voiceHead->command,"KCTD") != NULL){pinMode(SWITCH3,OUTPUT);digitalWrite(SWITCH3,LOW);}else if(strstr(voiceHead->command,"GCTD") != NULL){digitalWrite(SWITCH3,HIGH);}else if(strstr(voiceHead->command,"KKTD") != NULL){pinMode(SWITCH4,OUTPUT);digitalWrite(SWITCH4,LOW);}else if(strstr(voiceHead->command,"GKTD") != NULL){digitalWrite(SWITCH4,HIGH);}else if(strstr(voiceHead->command,"KS") != NULL){pthread_t cameraThread;printf("1111\n");system("sudo killall -TERM motion");delay(3000); pthread_create(&cameraThread,NULL,cameraThread_func,NULL);}}} }
}void* socketThread(void* datas){int n_read = 0;pthread_t readThread;struct sockaddr_in c_addr;memset(&c_addr,0,sizeof(struct sockaddr_in));int clen = sizeof(struct sockaddr_in);socketHeadler=findcommandByName("socketserver",commandhead);if(socketHeadler ==NULL){printf("NO find socketserver!\n");pthread_exit(NULL);}else{printf("find socketserver!\n"); }socketHeadler->init(socketHeadler,NULL,NULL);while(1){c_fd=accept(socketHeadler->sfd,(struct sockaddr*)&c_addr,&clen);pthread_create(&readThread,NULL,read_Thread,NULL); }
}void * video_thread(void *datas){system("sudo motion");
printf(" chest ... \n");//pthread_exit(NULL); }int main(){if(wiringPiSetup() == -1){ printf("wiringPiSetup failed!\n");return -1; }char name[128];pthread_t voice_thread;
pthread_t socket_thread;
pthread_t fireAlarm_thread;
pthread_t videoThread;//设备工厂初始化
tem=addbathroomLink(tem);
tem=addupstairLink(tem);
tem=addrestaurantLink(tem);
tem=addlivingroomLink(tem);tem= addfiretoLink(tem);
tem=addBeepToDeviceLink(tem); tem=addcameraToDeviceLink(tem);commandhead=addvoiceControlInputLink(commandhead);
commandhead=addsockControlLink(commandhead);pthread_create(&voice_thread , NULL , voiceThread , NULL);
pthread_create(&socket_thread , NULL , socketThread , NULL);
pthread_create(&fireAlarm_thread,NULL,fireAlarmThread,NULL);pthread_create(&videoThread, NULL, video_thread, NULL);pthread_join(voice_thread,NULL);
pthread_join(socket_thread,NULL);
pthread_join(fireAlarm_thread,NULL);pthread_join(videoThread,NULL);return 0;
}
相关文章:
基于树莓派的智能家居项目整理
一、功能介绍 二、设计框图 三、实物展示 四、程序 一、功能介绍硬件:树莓派3B、LD3320语音识别模块、pi 摄像头、继电器组、小灯、火焰传感器、蜂鸣器、电 磁锁 项目框架: 采用了简单工厂模式的一个设计方式。稳定,拓展性…...

《洛阳冬冷》
——洛阳的冬天太冷,最暖不过你的眼神。 ******* 她拿了个画着几丛竹子的小团扇子一路分花拂柳地往前走,后面一水儿的侍女不敢出声,只得地默默跟着她。她一张脸本来生得就好看,这一怒起来竟然还更加的好看了。此时她走得太急&…...
YOLOv5简介
YOLOv5 一、输入端 1. Mosaic数据增强: CutMix 数据增强:随机生成一个裁剪框Box,裁剪掉A图中的相应位置,然后用B图相应位置的ROI放到A中被裁剪的区域中形成新的样本。采用加权求和的方式计算损失,将A区域中被cut掉的…...
【面向对象语言三大特性之 “继承”】
目录 1.继承的概念及定义 1.1继承的概念 1.2 继承定义 1.2.1定义格式 1.2.2继承关系和访问限定符 1.2.3继承基类成员访问方式的变化 2.基类和派生类对象赋值转换 3.继承中的作用域 4.派生类的默认成员函数 5.继承与友元 6. 继承与静态成员 7.复杂的菱形继承及菱形虚拟…...
Ambari2.7.5集群搭建详细流程
0 说明 本文基于本地虚拟机从零开始搭建ambari集群 1 前置条件 1.1 本地虚拟机环境 节点角色ambari-1ambari-server ambari-agentambari-2ambari-agentambari-3ambari-agent 1.2 安装包 1.3 修改主机名并配置hosts文件 hostnamectl set-hostname ambari-1 hostnamectl se…...

房产|1月全国70城房价出炉!疫情放开后你关心的城市房价有何变化
2023年1月份,70个大中城市中新房销售价格环比上涨城市个数增加;一线城市新房销售价格环比同比转涨、二三线城市环比降势趋缓,二三线城市同比下降。 | 新房/二手房12月-1月环比上涨城市数量变化 70个大中城市中,新房环比上涨城市…...

秒验 重新定义“一键登录”
现如今,一般APP在注册登录时,仍然要经历填写用户名、密码、绑定手机号等一系列传统流程,有的人认为可以通过第三方登录避免这些流程,但仍旧要经历手机验证码的环节,而且存在验证码被拦截的风险,短信费用也很…...

ZenBuster:一款功能强大的多线程跨平台URL枚举工具
关于ZenBuster ZenBuster是一款功能强大的多线程跨平台URL枚举工具,该工具基于Python开发,同时还具备暴力破解功能。 该工具适用于安全专业人员,可以在渗透测试或CTF比赛中为广大研究人员提供帮助,并收集和目标相关的各种信息。…...
2023年美赛ICM问题E:光污染 这题很好做啊!
2023年美赛ICM问题E:光污染 这题很好做啊! 我看到DS数模的分析,看似头头是道,实则GouPi不通,我出一个,用于大家…...
)
InVEST模型 | 01 InVEST模型安装(Windows10)
除了在Python Anaconda环境中进行安装InVEST模型Python安装,平时最常使用的安装方式是通过.exe直接进行安装,本节介绍的就是直接下载安装的步骤: 打开InVEST模型下载页面 链接为:https://naturalcapitalproject.stanford.edu/…...
spring-web InvocableHandlerMethod 源码分析
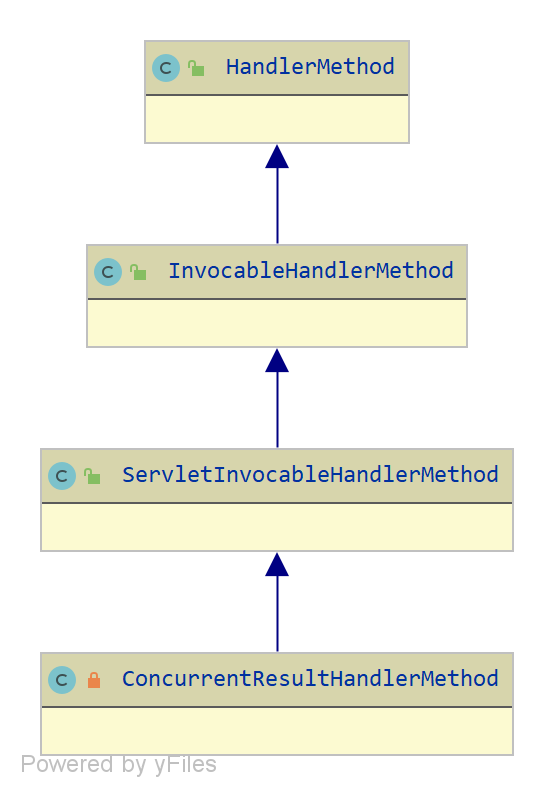
说明 本文基于 jdk 8, spring-framework 5.2.x 编写。author JellyfishMIX - github / blog.jellyfishmix.comLICENSE GPL-2.0 类层次 HandlerMethod,处理器的方法的封装对象。HandlerMethod 只提供了处理器的方法的基本信息,不提供调用逻辑。 Invoca…...

一分钟了解微信公众号服务器配置自动回复
1、建一个web服务工程 2、开放任意一个接口, 比如 /aaa/bbb/ccc 把接口路径配置在这里,ip为公网ip或域名,其他的参数默认,对入门选手没啥用 3、该接口允许get和post两种方式访问,接口需要对于访问方式编写两套逻辑…...
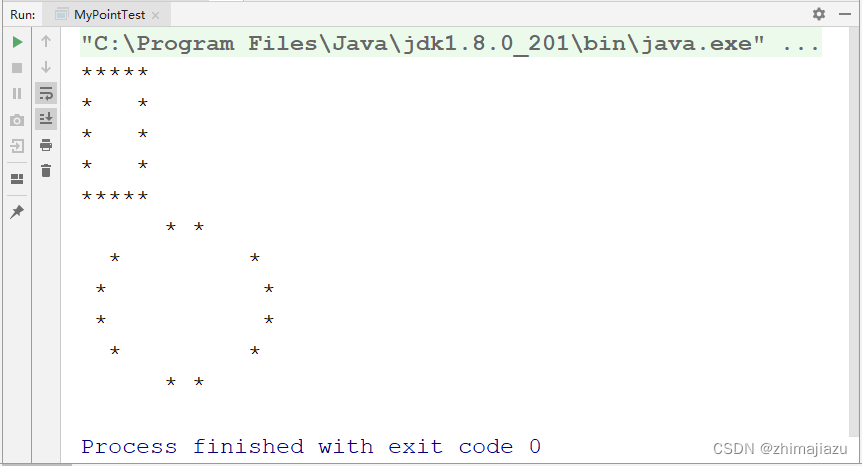
打印不同的图形-课后程序(JAVA基础案例教程-黑马程序员编著-第四章-课后作业)
【案例4-1】打印不同的图形 记得 关注,收藏,评论哦,作者将持续更新。。。。 【案例介绍】 案例描述 本案例要求编写一个程序,可以根据用户要求在控制台打印出不同的图形。例如,用户自定义半径的圆形和用户自定义边长的…...

14. QT_OPenGL中引入顶点着色器和片段着色器
1. 说明: 着色器是OPenGL中非常重要的一部分,在有了模型后,如果未给模型添加着色器,那么渲染效果会折扣很多。着色器中使用到的语言是GLSL(OPenGL Shader Language),可以通过这篇文章GLSL基本语法进行了解。 效果展示:…...
ecaozzz
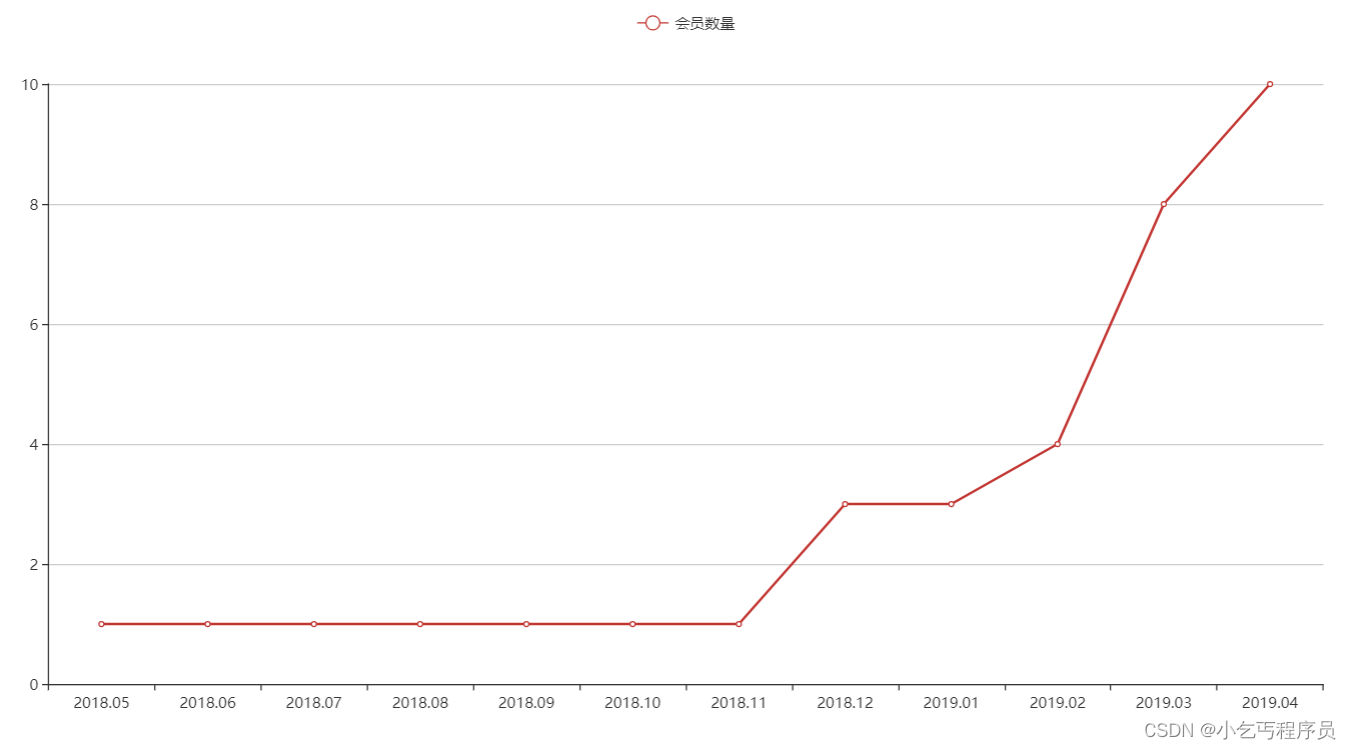
2. 图形报表ECharts 2.1 ECharts简介 ECharts缩写来自Enterprise Charts,商业级数据图表,是百度的一个开源的使用JavaScript实现的数据可视化工具,可以流畅的运行在 PC 和移动设备上,兼容当前绝大部分浏览器(IE8/9/10/…...
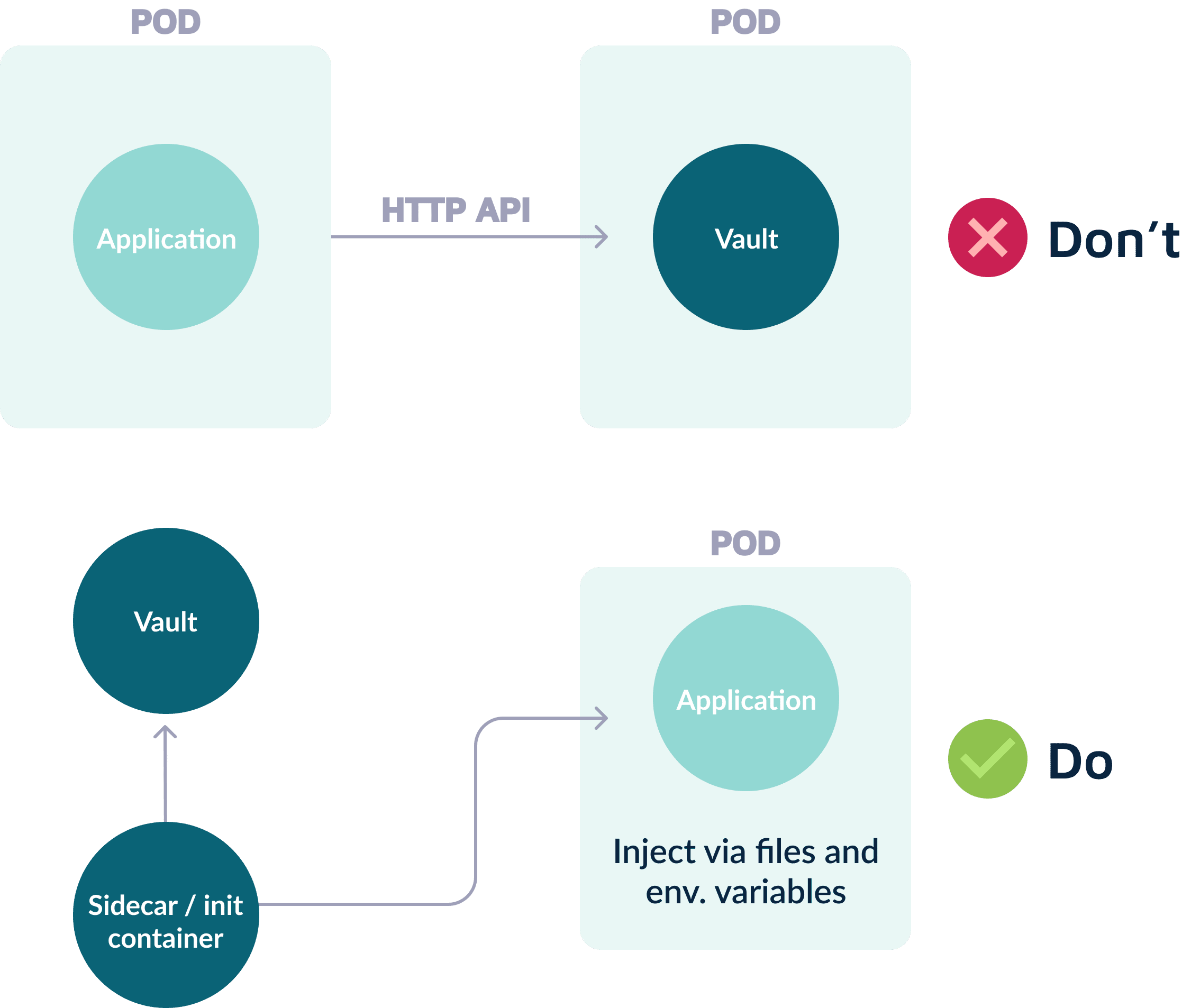
应用部署初探:6个保障安全的最佳实践
在之前的文章中,我们了解了应用部署的阶段以及常见的部署模式,包括微服务架构的应用应该如何部署等基本内容。本篇文章将介绍如何安全地部署应用程序。 安全是软件开发生命周期(SDLC)中的关键部分,同时也需要成为 S…...
转转测试环境docker化实践
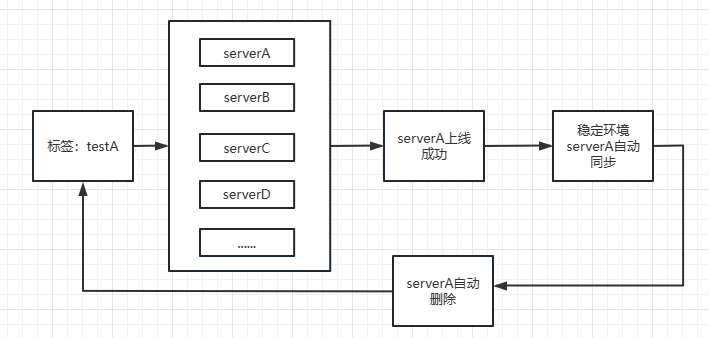
测试环境对于任何一个软件公司来讲,都是核心基础组件之一。转转的测试环境伴随着转转的发展也从单一的几套环境发展成现在的任意的docker动态环境docker稳定环境环境体系。期间环境系统不断的演进,去适应转转集群扩张、新业务的扩展,走了一些…...

linux 之 ps命令介绍
哈喽,大家好,我是有勇气的牛排(全网同名)🐮 有问题的小伙伴欢迎在文末评论,点赞、收藏是对我最大的支持!!!。 前言 如过想实现对进程监控,就需要使用到ps命…...

Server端的Actor,分工非常的明确,但是只将Actor作为一部手机来用,真的合适吗?
这是一篇介绍PowerJob,Server端Actor的文章,如果感兴趣可以请点个关注,大家互相交流一下吧。 server端一共有两个Actor,一个是处理worker传过来的信息,一个是server之间的信息传递。 处理Worker的Actor叫做WorkerRequ…...
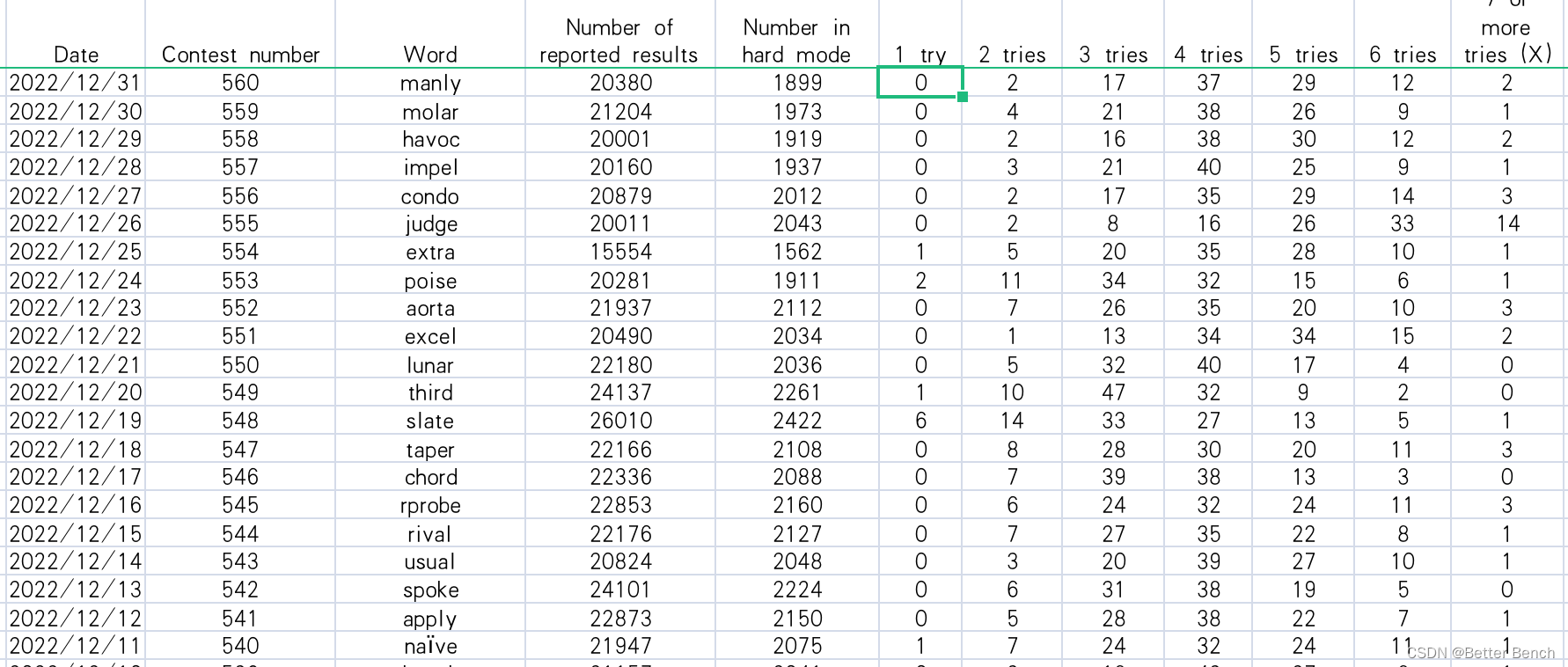
2023年美赛C题 预测Wordle结果Predicting Wordle Results这题太简单了吧
2023年美赛C题 预测Wordle结果Predicting Wordle Results 更新时间:2023-2-17 11:30 1 题目 2023年MCM 问题C:预测Wordle结果 Wordle是纽约时报目前每天提…...
。】2022-5-15)
【根据当天日期输出明天的日期(需对闰年做判定)。】2022-5-15
缘由根据当天日期输出明天的日期(需对闰年做判定)。日期类型结构体如下: struct data{ int year; int month; int day;};-编程语言-CSDN问答 struct mdata{ int year; int month; int day; }mdata; int 天数(int year, int month) {switch (month){case 1: case 3:…...
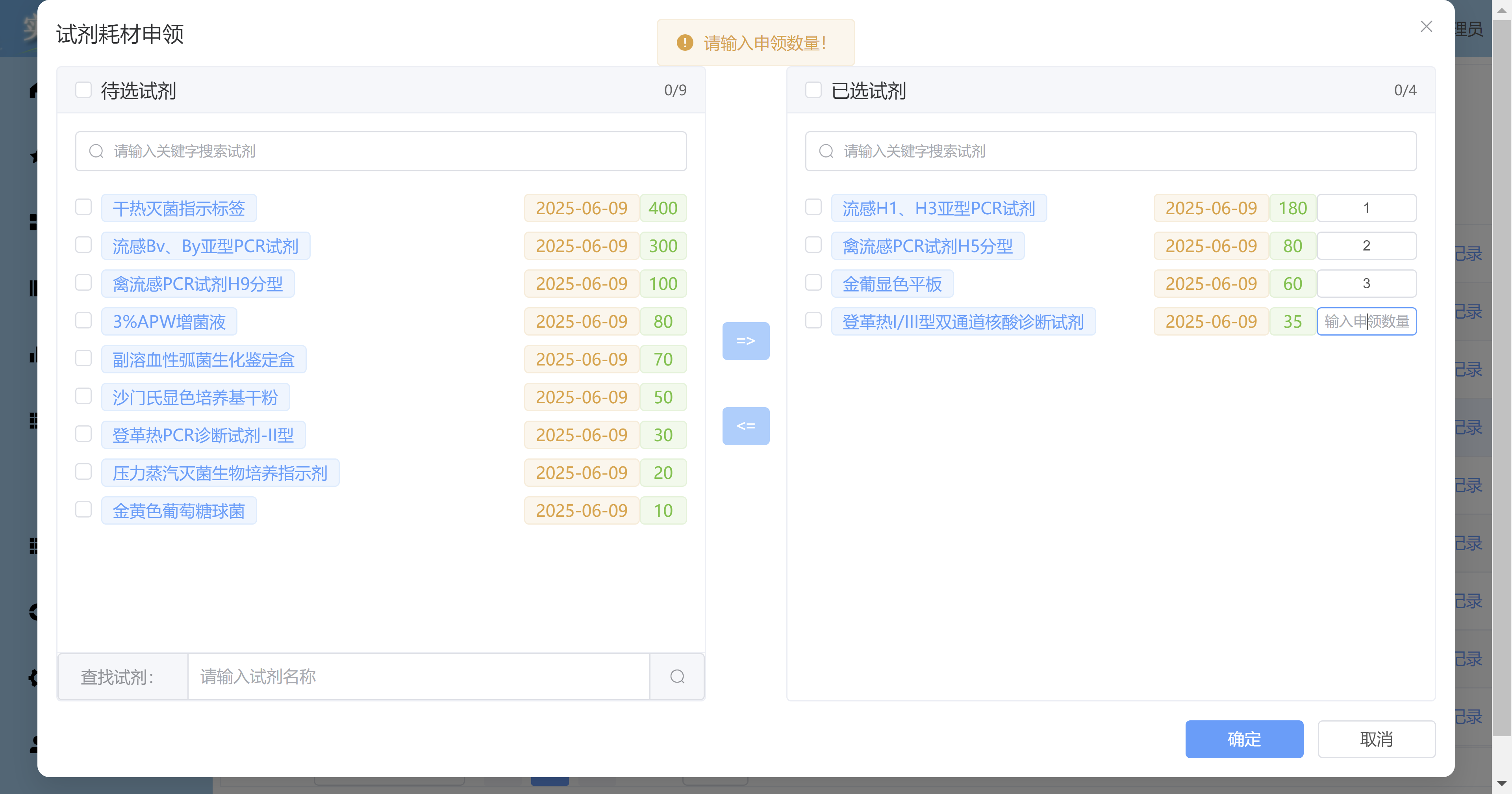
Vue3 + Element Plus + TypeScript中el-transfer穿梭框组件使用详解及示例
使用详解 Element Plus 的 el-transfer 组件是一个强大的穿梭框组件,常用于在两个集合之间进行数据转移,如权限分配、数据选择等场景。下面我将详细介绍其用法并提供一个完整示例。 核心特性与用法 基本属性 v-model:绑定右侧列表的值&…...

Objective-C常用命名规范总结
【OC】常用命名规范总结 文章目录 【OC】常用命名规范总结1.类名(Class Name)2.协议名(Protocol Name)3.方法名(Method Name)4.属性名(Property Name)5.局部变量/实例变量(Local / Instance Variables&…...

抖音增长新引擎:品融电商,一站式全案代运营领跑者
抖音增长新引擎:品融电商,一站式全案代运营领跑者 在抖音这个日活超7亿的流量汪洋中,品牌如何破浪前行?自建团队成本高、效果难控;碎片化运营又难成合力——这正是许多企业面临的增长困局。品融电商以「抖音全案代运营…...

学校招生小程序源码介绍
基于ThinkPHPFastAdminUniApp开发的学校招生小程序源码,专为学校招生场景量身打造,功能实用且操作便捷。 从技术架构来看,ThinkPHP提供稳定可靠的后台服务,FastAdmin加速开发流程,UniApp则保障小程序在多端有良好的兼…...

将对透视变换后的图像使用Otsu进行阈值化,来分离黑色和白色像素。这句话中的Otsu是什么意思?
Otsu 是一种自动阈值化方法,用于将图像分割为前景和背景。它通过最小化图像的类内方差或等价地最大化类间方差来选择最佳阈值。这种方法特别适用于图像的二值化处理,能够自动确定一个阈值,将图像中的像素分为黑色和白色两类。 Otsu 方法的原…...
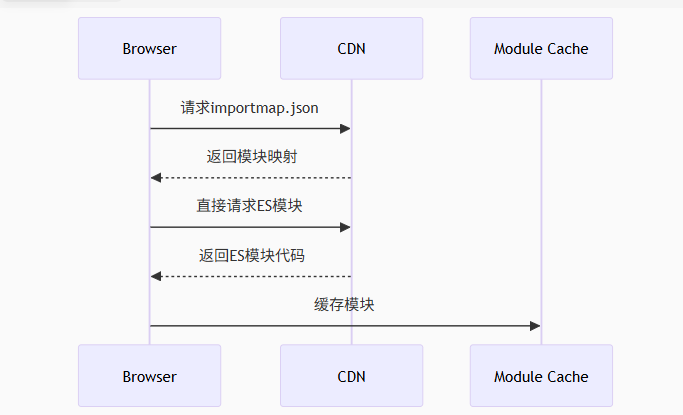
Module Federation 和 Native Federation 的比较
前言 Module Federation 是 Webpack 5 引入的微前端架构方案,允许不同独立构建的应用在运行时动态共享模块。 Native Federation 是 Angular 官方基于 Module Federation 理念实现的专为 Angular 优化的微前端方案。 概念解析 Module Federation (模块联邦) Modul…...
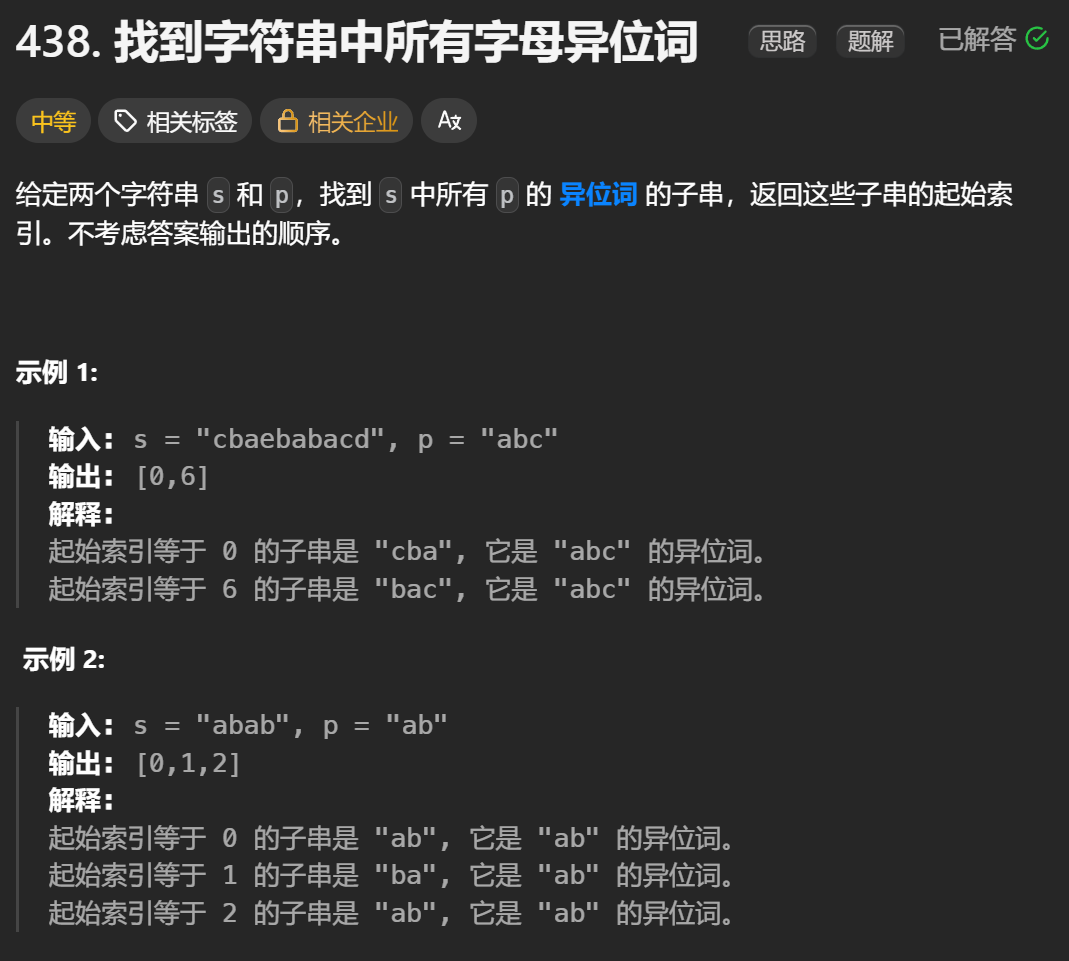
12.找到字符串中所有字母异位词
🧠 题目解析 题目描述: 给定两个字符串 s 和 p,找出 s 中所有 p 的字母异位词的起始索引。 返回的答案以数组形式表示。 字母异位词定义: 若两个字符串包含的字符种类和出现次数完全相同,顺序无所谓,则互为…...

稳定币的深度剖析与展望
一、引言 在当今数字化浪潮席卷全球的时代,加密货币作为一种新兴的金融现象,正以前所未有的速度改变着我们对传统货币和金融体系的认知。然而,加密货币市场的高度波动性却成为了其广泛应用和普及的一大障碍。在这样的背景下,稳定…...
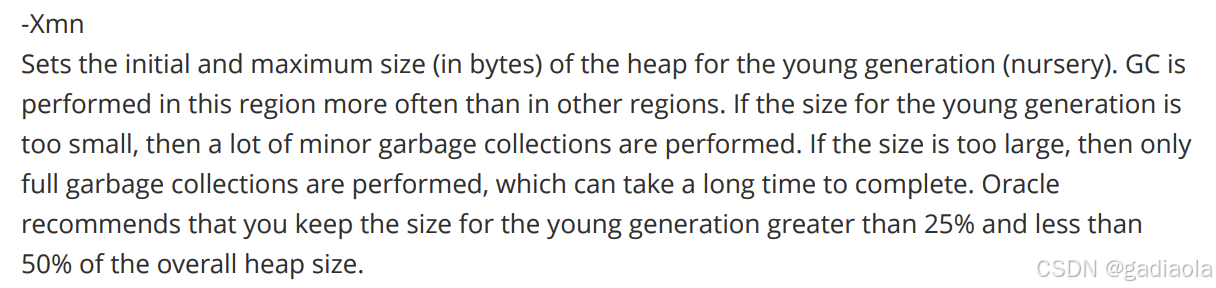
【JVM】Java虚拟机(二)——垃圾回收
目录 一、如何判断对象可以回收 (一)引用计数法 (二)可达性分析算法 二、垃圾回收算法 (一)标记清除 (二)标记整理 (三)复制 (四ÿ…...