Threejs中的Shadow Mapping(阴影贴图)
简而言之,步骤如下:
1.从灯光位置视点(阴影相机)创建深度图。
2.从相机的位置角度进行屏幕渲染,在每个像素点,比较由
阴影相机的MVP矩阵计算的深度值和深度图的值的大小,如果深度图值小的话,则表示该像素点有阴影,就在此处渲染阴影状态。
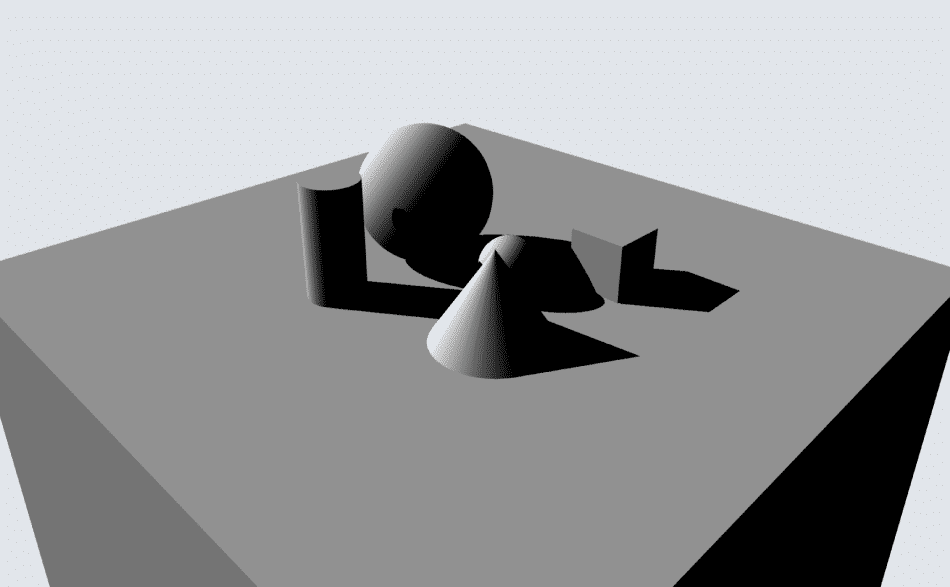
演示效果
1.创建深度图
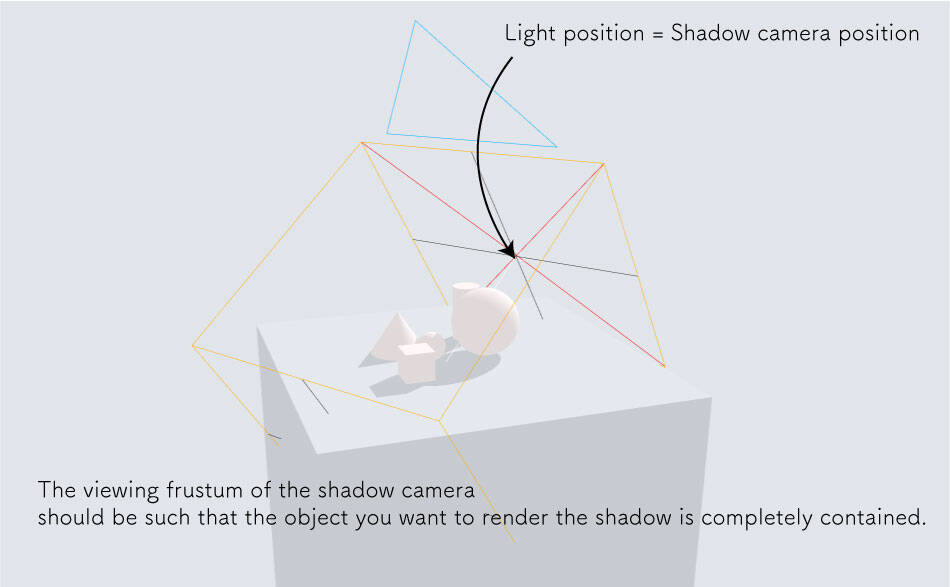
基本上,从头开始做阴影贴图时,只需要准备三样东西:灯光位置、阴影相机和深度图。为了更方便理解,本文用ShadowMapViewer来将深度图进行可视化。
方向光(Directional Light)
首先创造一个光源。
const light = new THREE.DirectionalLight( 0xffffff, 1.0 );
light.position.set(-30, 40, 10);
scene.add(light);
DirectionalLight有一个shadow参数,因此附加一个从灯光位置观察的阴影相机和一个从阴影相机角度写入深度值的fbo(frame buffer object,帧缓存对象)。
阴影相机(Shadow Camera)
由于光线是定向的,因此使用OrthographicCamera(正视相机)作为阴影相机来创建平行投影的深度图。
最重要的是必须设置好相机范围(视锥体),如果阴影相机范围太宽,深度图会不准确,因此最好将其设置在尽可能渲染阴影的最小范围,不要太宽或太窄。
const frustumSize = 80;light.shadow.camera = new THREE.OrthographicCamera(-frustumSize / 2,frustumSize / 2,frustumSize / 2,-frustumSize / 2,1,80
);// 和灯光位置保持一致
light.shadow.camera.position.copy(light.position);
light.shadow.camera.lookAt(scene.position);
scene.add(light.shadow.camera);
深度图(Depth Map)
接下来,为阴影相机视点准备深度图。
深度图如果分辨率设置太低图像会很粗糙,所以这次我们将准备一个 2048 x 2048 的fbo。
一般为了尽可能以高精度写入深度值,通常使用16位或32位纹理,但由于WebGL尚不兼容尚不支持浮动纹理的设备,所以我们用8位纹理的所有四个通道来存储单个32位值(在本例中为深度值),我们将使用three.js的ShaderChunk,方便转换。
light.shadow.mapSize.x = 2048;
light.shadow.mapSize.y = 2048;const pars = { minFilter: THREE.NearestFilter,magFilter: THREE.NearestFilter, format: THREE.RGBAFormat
};light.shadow.map = new THREE.WebGLRenderTarget( light.shadow.mapSize.x, this.light.shadow.mapSize.y, pars );
用于渲染深度图的材质
const shadowMaterial = new THREE.ShaderMaterial({vertexShader: vertexShader,fragmentShader: shadowFragmentShader
});
顶点shader基本是一样的。
void main(){gl_Position = projectionMatrix * viewMatrix * modelMatrix * vec4(position, 1.0);
}
因为我们要写入的深度图是8bit纹理,但是要输入的数据是32bit。在这里可以用three.js的shaderChunk中使用packDepthToRGBA来存储使用rgba通道的深度值。
// https://github.com/mrdoob/three.js/blob/master/src/renderers/shaders/ShaderChunk/packing.glsl.js#L18
#include <packing>void main(){// gl_FragCoord.z contains depth values from 0 to 1 in the viewing frustum range of the shadow camera.// 0 for near clip, 1 for far clipgl_FragColor = packDepthToRGBA(gl_FragCoord.z);
}
写入深度值
将shadowMaterial赋到mesh上,并渲染为深度图。
由于需要为阴影相机视点创建深度图,因此将深度图指定为“renderTarget”,将shadowCamera指定为“camera”。
// 更新每一帧
mesh.material = shadowMaterial;
renderer.setRenderTarget(light.shadow.map);
renderer.render(scene, light.shadow.camera);
这样的话我们就渲染了深度图,然后用我刚才说的ShadowMapViewer来查看深度图的调试效果。
// https://threejs.org/examples/?q=shadow#webgl_shadowmap_viewerconst depthViewer = new ShadowMapViewer(light);
depthViewer.size.set( 300, 300 );...
// render to canvas
renderer.setRenderTarget(null);
depthViewer.render( renderer );
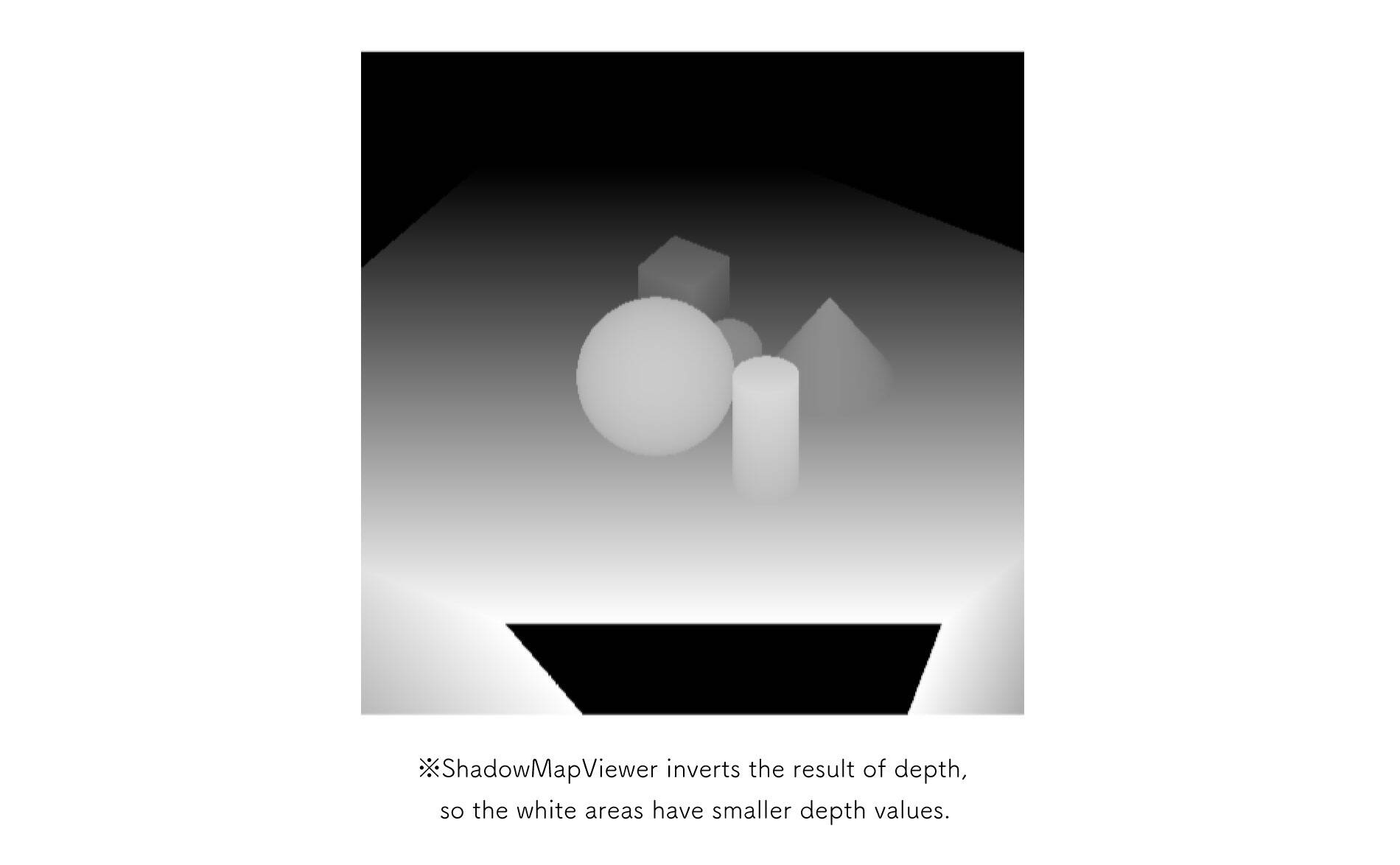
越靠近阴影相机的地方,深度值越小(因为ShadowMapViewer对结果取反了,所以越是白的地方,深度值越小)。
2.比较深度并创建阴影
屏幕渲染材质
将光照位置和深度图放入uniform变量中,阴影相机投影矩阵和视图矩阵也放入uniform变量中,因为在阴影相机的 MVP矩阵中计算的深度也必须在这个着色器中计算并与深度图进行比较。
const uniforms = {uColor: {value: new THREE.Color(color)},uLightPos: {value: light.position},uDepthMap: {value: light.shadow.map.texture},uShadowCameraP: {value: light.shadow.camera.projectionMatrix},uShadowCameraV: {value: light.shadow.camera.matrixWorldInverse},
}
const material = new THREE.ShaderMaterial({vertexShader,fragmentShader,uniforms,
});
在顶点着色器中添加一些代码。
uniform mat4 uShadowCameraP;
uniform mat4 uShadowCameraV;varying vec4 vShadowCoord;varying vec3 vNormal;void main(){vNormal = normal;vec3 pos = position;gl_Position = projectionMatrix * viewMatrix * modelMatrix * vec4(pos, 1.0);// 阴影相机视点的坐标传递给片段着色器并与深度图进行比较vShadowCoord = uShadowCameraP * uShadowCameraV * modelMatrix * vec4(pos, 1.0);
}
vShadowCoord的结果是裁剪空间中的坐标,因此vShadowCoord.xyz / vShadowCoord.w 的范围从 (-1, -1, -1)到(1,1,1)。
vShadowCoord.z / vShadowCoord.w是深度值,所以让它在0和1之间转换并与深度图进行比较。并让vShadowCoord.xy / vShadowCoord.w在(0,0)和(1,1)之间转换为uv来参考深度图。之所以使用MVP矩阵计算得到的结果作为uv,是因为我们可以参考与生成深度图的像素相同点的深度值。
由于深度图值是较早通过在rgba中分配32位数据输入的,因此在引用时需要将其恢复为原始值。
此解码使用来自three.js中相同ShaderChunk的unpackRGBAToDepth。
uniform vec3 uColor;
uniform sampler2D uDepthMap;
uniform vec3 uLightPos;varying vec3 vNormal;
varying vec4 vShadowCoord;// https://github.com/mrdoob/three.js/blob/master/src/renderers/shaders/ShaderChunk/packing.glsl.js#L24
#include <packing>void main(){vec3 shadowCoord = vShadowCoord.xyz / vShadowCoord.w * 0.5 + 0.5;float depth_shadowCoord = shadowCoord.z;vec2 depthMapUv = shadowCoord.xy;float depth_depthMap = unpackRGBAToDepth(texture2D(uDepthMap, depthMapUv));// Compare and if the depth value is smaller than the value in the depth map, then there is an occluder and the shadow is drawn.float shadowFactor = step(depth_shadowCoord, depth_depthMap);// check the result of the shadow factor.gl_fragColor = vec4(vec3(shadowFactor), 1.0);
}
在循环函数中,将屏幕渲染过程放在深度图渲染之后。
// 在循环函数中写入深度图
mesh.material = shaderMaterial;
renderer.setRenderTarget(light.shadow.map);
renderer.render(scene, light.shadow.camera);// 放置一个用于屏幕渲染的材质并将其渲染到画布上。
mesh.material = material;
renderer.setRenderTarget(null);
renderer.render(scene, camera);
调整深度值比较
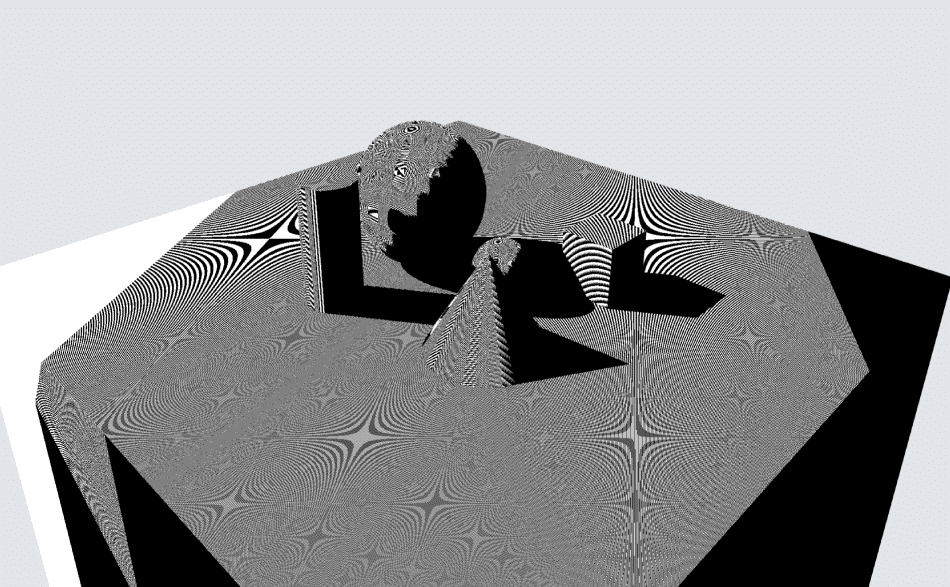
当显示shadowFactor(比较深度值的结果)时,会生成阴影,但会显示出一些奇怪类似摩尔纹的图案,这种现象被称为shadow acne,必须通过减去这一点的bias来比较深度值。
void main(){...float cosTheta = dot(normalize(uLightPos), vNormal);float bias = 0.005 * tan(acos(cosTheta)); // cosTheta is dot( n,l ), clamped between 0 and 1bias = clamp(bias, 0.0, 0.01);float shadowFactor = step(depth_shadowCoord - bias, depth_depthMap);gl_fragColor = vec4(vec3(shadowFactor), 1.0);
}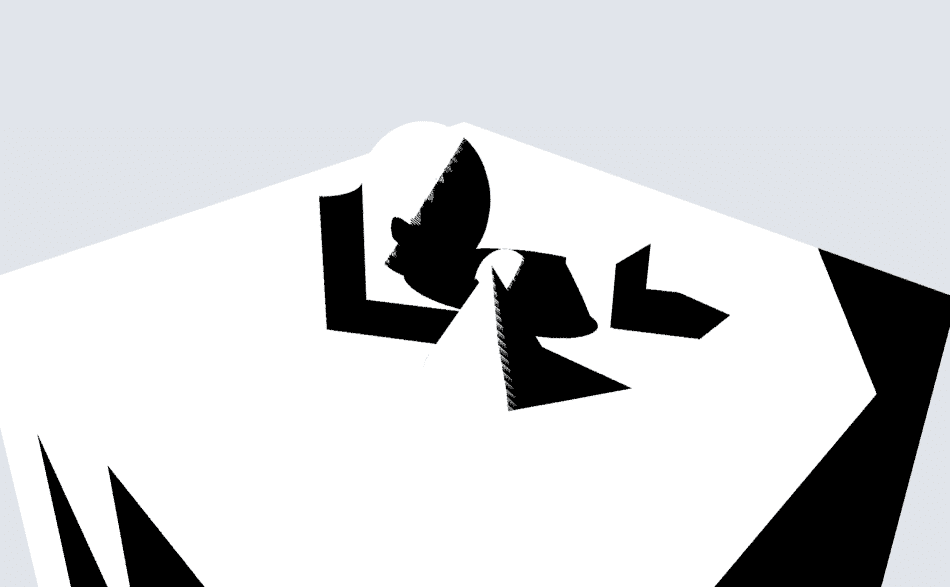
乘以定向光,然后完成着色。
相关文章:
Threejs中的Shadow Mapping(阴影贴图)
简而言之,步骤如下: 1.从灯光位置视点(阴影相机)创建深度图。 2.从相机的位置角度进行屏幕渲染,在每个像素点,比较由阴影相机的MVP矩阵计算的深度值和深度图的值的大小,如果深度图值小的话&…...
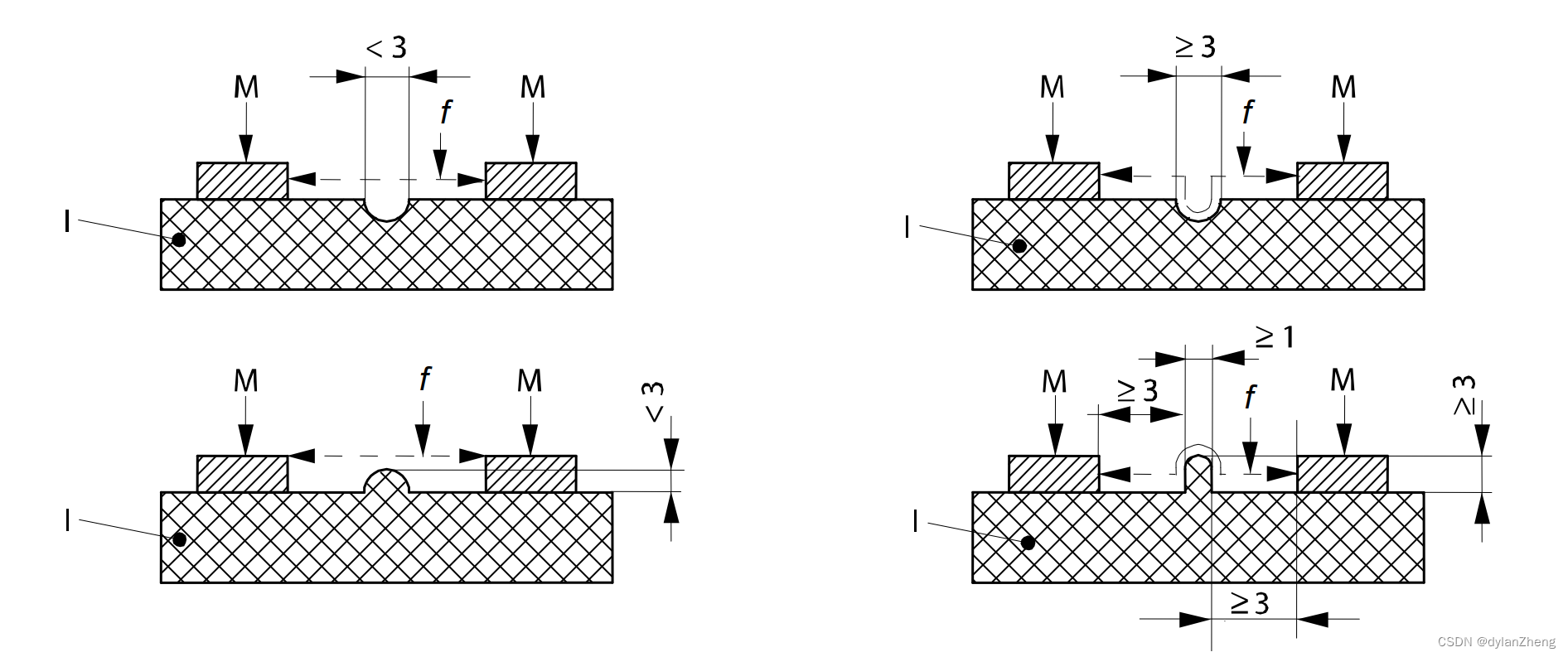
本质安全设备标准(IEC60079-11)的理解(四)
本质安全设备标准(IEC60079-11)的理解(四) 对于标准中“Separation”的理解 IEC60079-11使用了较长的篇幅来说明设计中需要考虑到的各种间距, 这也从一定程度上说明了间距比较重要,在设计中是需要认真考虑…...

(record)QEMU安装最小linux系统——TinyCore(命令行版)
文章目录QEMU安装最小linux系统——TinyCore参考QEMU使用qemu创建tinycore虚拟机再次启动文件保存QEMU安装最小linux系统——TinyCore 简单记录安装过程和记录点 参考 [原创] qemu 与 Tiny Core tinycore的探索 QEMU qemu不多介绍,这里是在WSL2上安装的linux版…...

C++中的cast类型转换
reinterpret_cast用法:reinpreter_cast<type-id> (expression)type-id必须是一个指针、引用、算术类型、函数指针或者成员指针。它可以把一个指针转换成一个整数,也可以把一个整数转换成一个指针。这个操作符能够在非相关的类型之间转换。操作结果…...

西瓜数据集读取的详细解决方案
大家好,我是爱编程的喵喵。双985硕士毕业,现担任全栈工程师一职,热衷于将数据思维应用到工作与生活中。从事机器学习以及相关的前后端开发工作。曾在阿里云、科大讯飞、CCF等比赛获得多次Top名次。喜欢通过博客创作的方式对所学的知识进行总结与归纳,不仅形成深入且独到的理…...

Mac开发环境配置
一、mac 安装homebrew 1. 必要性 homebrew可以通过bash命令快速安装配置开发环境,并且在大多数情况下可以实现环境的自动配置。(一键安装配置) 2. 收益 节省开发环境工具配置时间,提高人效。 3. 安装步骤 打开mac终端…...

概率论面试题1:玫瑰花
概率论面试题 1. 一个活动,n个女生手里拿着长短不一的玫瑰花,无序的排成一排,一个男生从头走到尾,试图拿更长的玫瑰花,一旦拿了一朵就不能再拿其他的,错过了就不能回头,问最好的策略࿱…...
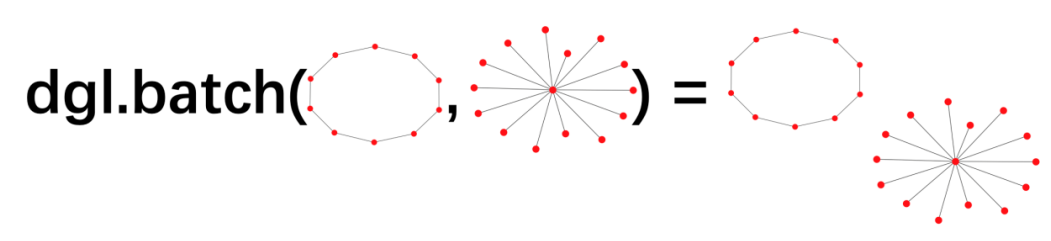
【DGL】图分类
目录概述数据集定义Data LoaderDGL中的batched graph定义模型训练参考概述 除了节点级别的问题——节点分类、边级别的问题——链接预测之外,还有整个图级别的问题——图分类。经过聚合、传递消息得到节点和边的新的表征后,映射得到整个图的表征。 数据…...
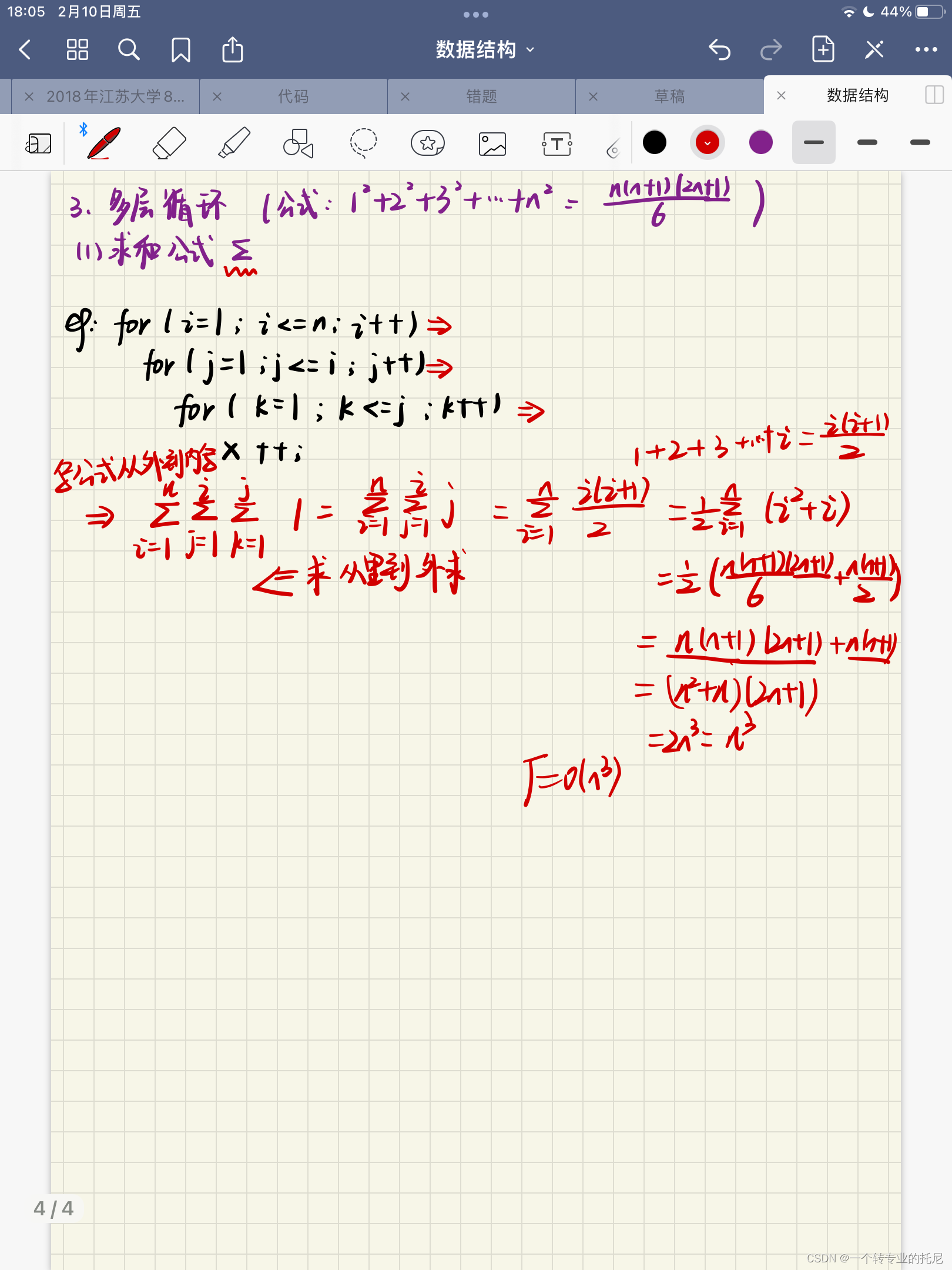
时间复杂度的计算(2023-02-10)
时间复杂度的计算 时间复杂度的计算分为三大类:一层循环、二层循环和多层循环。 一层循环 1.找出循环趟数t及每轮循环i的变化值 2.确立循环停止的条件 3.得出t与i之间的关系 4.联立两式,得出结果 eg: void fun(int n) {int i0;while (i*i*i<n)i;…...
测试开发之Django实战示例 第六章 追踪用户行为
第六章 追踪用户行为在之前的章节里完成了小书签将外站图片保存至本站的功能,并且实现了通过jQuery发送AJAX请求,让用户可以对图片进行喜欢/不喜欢操作。这一章将学习如何创建一个用户关注系统和创建用户行为流数据,还将学习Django的信号框架…...

红米9a手动root方法
简介 已知红米6A/6/9/9A/9C/10A机器都可以快速解锁BL,无任何变砖风险 并且秒解锁BL后和官方解锁一样,无任何其他不良影响。推荐大家使用官网解锁,需要等待7天。 BootLoader BootLoader是在操作系统内核运行之前运行的一段小程序。其实…...
)
Open3D 点云最小二乘法拟合平面(剔除噪声,Python版本)
除了诱惑之外,我可以抵抗任何事物。 ----王尔德 文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 这个算法的思路很简单,就是通过剔除一些异常点来拟合更为合适的平面,具体过程如下所示: 1、首先使用最小二乘法拟合一个平面系数的初值。 2、计算所有有效点到拟合…...

【SpringBoot】简述springboot项目启动数据加载内存中的三种方法
一、前言一般来说,SpringBoot工程环境配置放在properties文件中,启动的时候将工程中的properties/yaml文件的配置项加载到内存中。但这种方式改配置项的时候,需要重新编译部署,考虑到这种因素,今天介绍将配置项存到数据…...
【一文速通】各种机器学习算法的特点及应用场景
近邻 (Nearest Neighbor)KNN算法的核心思想是,如果一个样本在特征空间中的K个最相邻的样本中的大多数属于某一个类别,则该样本也属于这个类别,并具有这个类别上样本的特性。该方法在确定分类决策上只依据最邻近的一个或者几个样本的类别来决定…...

多传感器融合定位十四-基于图优化的定位方法
多传感器融合定位十四-基于图优化的定位方法1. 基于图优化的定位简介1.1 核心思路1.2 定位流程2. 边缘化原理及应用2.1 边缘化原理2.2 从滤波角度理解边缘化3. 基于kitti的实现原理3.1 基于地图定位的滑动窗口模型3.2 边缘化过程4. lio-mapping 介绍4.1 核心思想4.2 具体流程4.…...
PHP基于TCPDF第三方类生成PDF文件
最近在研发招聘的系统 遇到了这个问题 转换pdf 折腾了很久 分享一下PHP基于TCPDF第三方类生成PDF文件最近遇到一个需求,需要根据数据库的字段生成表格式的PDF文件并发送邮箱第一步、我们先去官网上面去下载tcpdf的类:http://www.tcpdf.org/或者是从githu…...
:Sentinel定义资源的方式)
SpringCloud(19):Sentinel定义资源的方式
Sentinel除了基本的定义资源的方式之外,还有其他的定义资源的方式,具体如下: 抛出异常的方式定义资源返回布尔值方式定义资源异步调用支持注解方式定义资源主流框架的默认适配1 抛出异常的方式定义资源 Sentinel中的SphU包含了try-catch风格的API。用这种方式,当资源发生了…...

前端 ES6 之 Promise 实践应用与控制反转
Promise 主要是为解决程序异步处理而生的,在现在的前端应用中无处不在,已然成为前端开发中最重要的技能点之一。它不仅解决了以前回调函数地狱嵌套的痛点,更重要的是它提供了更完整、更强大的异步解决方案。 同时 Promise 也是前端面试中必不…...

LightGBM
目录 1.LightGBM的直方图算法(Histogram) 直方图做差加速 2.LightGBM得两大先进技术(GOSS&EFB) 2.1 单边梯度抽样算法(GOSS) 2.2 互斥特征捆绑算法(EFB) 3.LightGBM得生长策略(leaf-wise) 通过与xgboost对比,在这里列出lgb新提出的几个方面的技术 1.Ligh…...
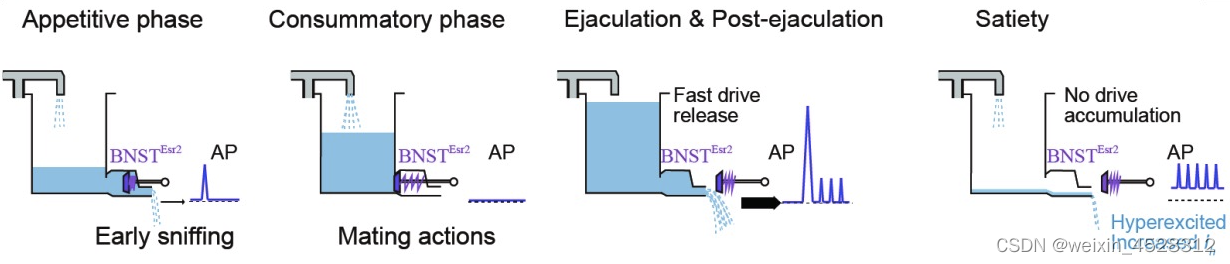
Science:北京脑研究中心李莹实验室揭示性满足感的分子机制
短暂的社交经历(例如,性经历)可导致内部状态的长期变化并影响社会行为,如交配、攻击。例如,在成功交配射精后,许多物种迅速表现出对交配倾向的抑制有数小时、数天或更长时间,这种效应称为性满足…...

利用ngx_stream_return_module构建简易 TCP/UDP 响应网关
一、模块概述 ngx_stream_return_module 提供了一个极简的指令: return <value>;在收到客户端连接后,立即将 <value> 写回并关闭连接。<value> 支持内嵌文本和内置变量(如 $time_iso8601、$remote_addr 等)&a…...

从零实现富文本编辑器#5-编辑器选区模型的状态结构表达
先前我们总结了浏览器选区模型的交互策略,并且实现了基本的选区操作,还调研了自绘选区的实现。那么相对的,我们还需要设计编辑器的选区表达,也可以称为模型选区。编辑器中应用变更时的操作范围,就是以模型选区为基准来…...
循环冗余码校验CRC码 算法步骤+详细实例计算
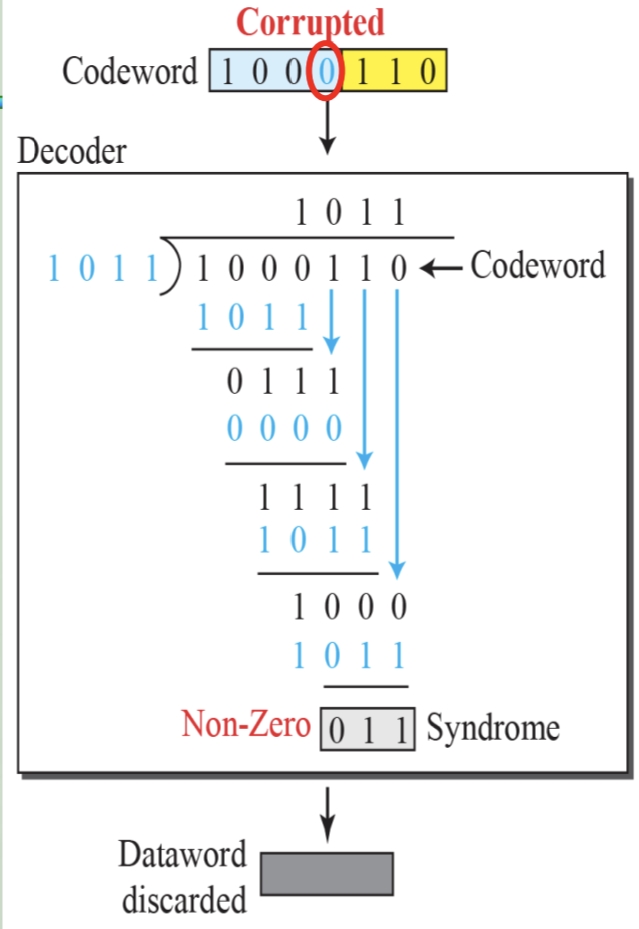
通信过程:(白话解释) 我们将原始待发送的消息称为 M M M,依据发送接收消息双方约定的生成多项式 G ( x ) G(x) G(x)(意思就是 G ( x ) G(x) G(x) 是已知的)࿰…...
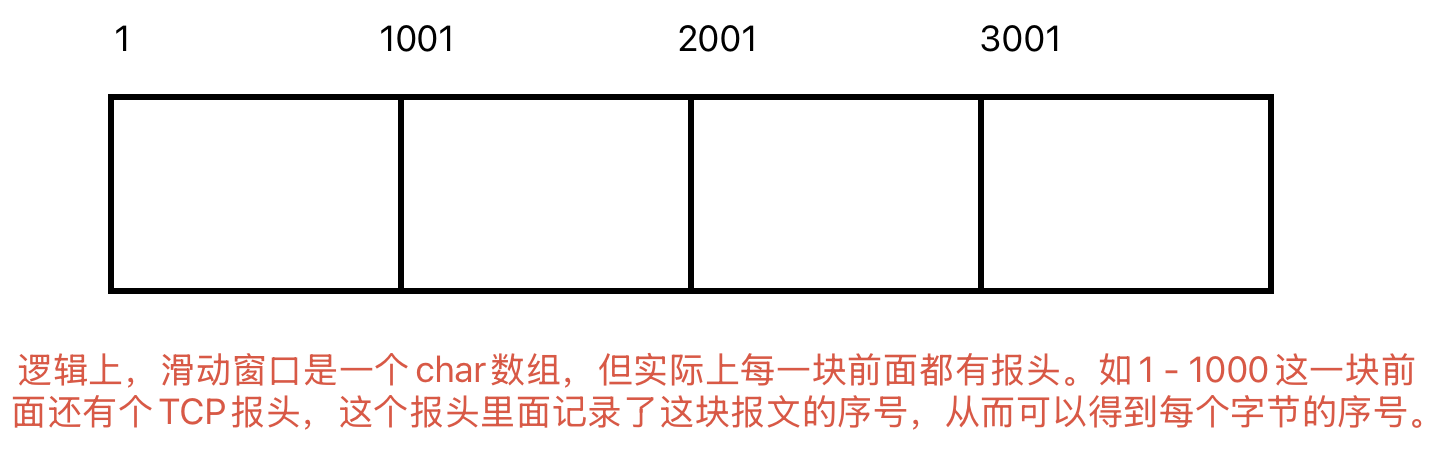
Linux相关概念和易错知识点(42)(TCP的连接管理、可靠性、面临复杂网络的处理)
目录 1.TCP的连接管理机制(1)三次握手①握手过程②对握手过程的理解 (2)四次挥手(3)握手和挥手的触发(4)状态切换①挥手过程中状态的切换②握手过程中状态的切换 2.TCP的可靠性&…...
HTML 列表、表格、表单
1 列表标签 作用:布局内容排列整齐的区域 列表分类:无序列表、有序列表、定义列表。 例如: 1.1 无序列表 标签:ul 嵌套 li,ul是无序列表,li是列表条目。 注意事项: ul 标签里面只能包裹 li…...

Java面试专项一-准备篇
一、企业简历筛选规则 一般企业的简历筛选流程:首先由HR先筛选一部分简历后,在将简历给到对应的项目负责人后再进行下一步的操作。 HR如何筛选简历 例如:Boss直聘(招聘方平台) 直接按照条件进行筛选 例如:…...
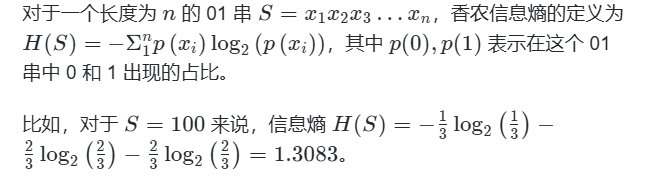
蓝桥杯3498 01串的熵
问题描述 对于一个长度为 23333333的 01 串, 如果其信息熵为 11625907.5798, 且 0 出现次数比 1 少, 那么这个 01 串中 0 出现了多少次? #include<iostream> #include<cmath> using namespace std;int n 23333333;int main() {//枚举 0 出现的次数//因…...
)
Android第十三次面试总结(四大 组件基础)
Activity生命周期和四大启动模式详解 一、Activity 生命周期 Activity 的生命周期由一系列回调方法组成,用于管理其创建、可见性、焦点和销毁过程。以下是核心方法及其调用时机: onCreate() 调用时机:Activity 首次创建时调用。…...
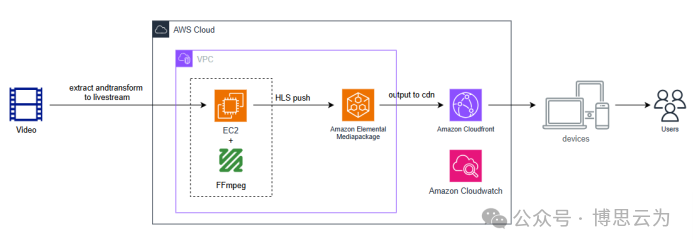
客户案例 | 短视频点播企业海外视频加速与成本优化:MediaPackage+Cloudfront 技术重构实践
01技术背景与业务挑战 某短视频点播企业深耕国内用户市场,但其后台应用系统部署于东南亚印尼 IDC 机房。 随着业务规模扩大,传统架构已较难满足当前企业发展的需求,企业面临着三重挑战: ① 业务:国内用户访问海外服…...
2025年- H71-Lc179--39.组合总和(回溯,组合)--Java版
1.题目描述 2.思路 当前的元素可以重复使用。 (1)确定回溯算法函数的参数和返回值(一般是void类型) (2)因为是用递归实现的,所以我们要确定终止条件 (3)单层搜索逻辑 二…...