【深度学习】C++ Tensorrt Yolov8 目标检测推理
C++ Tensorrt Yolov8 目标检测推理
- 模型导出
- 代码
- yolov8.h
- yolov8.cpp
- common.hpp
- CMakeList
- main.cpp
C++ tensorrt对yolov8目标检测模型进行推理。
Windows版本下只需要修改common.hpp对文件的判断S_ISREG 和对文件夹的判断S_ISDIR即可,非核心代码,不调用删掉都可以。亲测可行。
模型导出
python 导出onnx
from ultralytics import YOLO# Load the YOLOv8 model
model = YOLO("best.pt")# # Export the model to ONNX format
model.export(format="onnx", dynamic=False, simplify=True, imgsz = (640,640), opset=12, half=False, int8=False) # creates 'yolov8n.onnx'
tensorRT自带bin下的trtexec导出engine模型
## export trt/
(base) xiaoxin@xiaoxin:/usr/local/TensorRT-8.6.1.6/bin$ sudo ./trtexec --onnx=/home/xiaoxin/Documents/ultralytics-main/best.onnx --saveEngine=/home/xiaoxin/Documents/ultralytics-main/best.engine --workspace=1024 --fp16# Key Value Description
# format 'torchscript' format to export to
# imgsz 640 image size as scalar or (h, w) list, i.e. (640, 480)
# keras False use Keras for TF SavedModel export
# optimize False TorchScript: optimize for mobile
# half False FP16 quantization
# int8 False INT8 quantization
# dynamic False ONNX/TF/TensorRT: dynamic axes
# simplify False ONNX: simplify model
# opset None ONNX: opset version (optional, defaults to latest)
# workspace 4 TensorRT: workspace size (GB)
# nms False CoreML: add NMS
代码
yolov8.h
#ifndef YOLOV8_H
#define YOLOV8_H
#include "NvInferPlugin.h"
#include "common.hpp"
#include "fstream"
using namespace det;#define _PRINT true
// #define BATCHED_NMS
// #define assert(_Expression) ((void)0)class YOLOv8 {
public:explicit YOLOv8(const std::string& engine_file_path);~YOLOv8();void makePipe(bool warmup = true);void copyFromMat(const cv::Mat& image);void copyFromMat(const cv::Mat& image, cv::Size& size);void letterBox(const cv::Mat& image, cv::Mat& out, cv::Size& size);void infer();void postprocess(std::vector<Object>& objs,float score_thres = 0.25f,float iou_thres = 0.65f,int topk = 100,int num_labels = 1);static void draw_objects(const cv::Mat& image,cv::Mat& res,const std::vector<Object>& objs,const std::vector<std::string>& CLASS_NAMES,const std::vector<std::vector<unsigned int>>& COLORS);public:int num_bindings;int num_inputs = 0;int num_outputs = 0;std::vector<Binding> input_bindings;std::vector<Binding> output_bindings;std::vector<void*> host_ptrs;std::vector<void*> device_ptrs;PreParam pparam;Parameter param;private:nvinfer1::ICudaEngine* engine = nullptr;nvinfer1::IRuntime* runtime = nullptr;nvinfer1::IExecutionContext* context = nullptr;cudaStream_t stream = nullptr;Logger gLogger{nvinfer1::ILogger::Severity::kERROR};
};
#endif // YOLOV8_H
yolov8.cpp
#include "yolov8.h"// init engine model
YOLOv8::YOLOv8(const std::string& engine_file_path)
{// 1. make sure this file can be open by binary mode.std::ifstream file(engine_file_path, std::ios::binary);if(!file.good()){if(_PRINT){std::cout << "[ERROR] can not open file, please check up your engine file!" << std::endl;}return;}// 2. move pointer to the end.file.seekg(0, std::ios::end);// 3. get the location of current pointer.auto size = file.tellg();// 4. move pointer to start.file.seekg(0, std::ios::beg);char* trtModelStream = new char[size];assert(trtModelStream);file.read(trtModelStream, size);file.close();// 5. create runtime object deserialization/// important tip ///// in order to use initLibNvInferPlugins, link to nvinfer_plugin.so or nvinfer_plugin.dll.// if you have some errors in this method, check up your .so or .dll files. you can put them in program directory.initLibNvInferPlugins(&this->gLogger, "");this->runtime = nvinfer1::createInferRuntime(this->gLogger);assert(this->runtime != nullptr);this->engine = this->runtime->deserializeCudaEngine(trtModelStream, size);assert(this->engine != nullptr);delete[] trtModelStream;// 6. create some space to store intermediate activation values.this->context = this->engine->createExecutionContext();assert(this->context != nullptr);cudaStreamCreate(&this->stream);// 7. get number of input tensor and output tensor.this->num_bindings = this->engine->getNbBindings();// 8. get binding dimensions, this process can support different dimensions.for (int i = 0; i < this->num_bindings; ++i) {Binding binding;nvinfer1::Dims dims;nvinfer1::DataType dtype = this->engine->getBindingDataType(i);std::string name = this->engine->getBindingName(i);binding.name = name;binding.dsize = type_to_size(dtype);bool IsInput = engine->bindingIsInput(i);if (IsInput) {this->num_inputs += 1;dims = this->engine->getProfileDimensions(i, 0, nvinfer1::OptProfileSelector::kMAX);binding.size = get_size_by_dims(dims);binding.dims = dims;this->input_bindings.push_back(binding);// set max opt shapethis->context->setBindingDimensions(i, dims);}else {dims = this->context->getBindingDimensions(i);binding.size = get_size_by_dims(dims);binding.dims = dims;this->output_bindings.push_back(binding);this->num_outputs += 1;}}
}YOLOv8::~YOLOv8()
{this->context->destroy();this->engine->destroy();this->runtime->destroy();cudaStreamDestroy(this->stream);for (auto& ptr : this->device_ptrs) {CHECK(cudaFree(ptr));}for (auto& ptr : this->host_ptrs) {CHECK(cudaFreeHost(ptr));}
}// warm up.
void YOLOv8::makePipe(bool warmup)
{for (auto& bindings : this->input_bindings) {void* d_ptr;CHECK(cudaMallocAsync(&d_ptr, bindings.size * bindings.dsize, this->stream));this->device_ptrs.push_back(d_ptr);}for (auto& bindings : this->output_bindings) {void * d_ptr, *h_ptr;size_t size = bindings.size * bindings.dsize;CHECK(cudaMallocAsync(&d_ptr, size, this->stream));CHECK(cudaHostAlloc(&h_ptr, size, 0));this->device_ptrs.push_back(d_ptr);this->host_ptrs.push_back(h_ptr);}if (warmup) {for (int i = 0; i < 5; i++) {for (auto& bindings : this->input_bindings) {size_t size = bindings.size * bindings.dsize;void* h_ptr = malloc(size);memset(h_ptr, 0, size);CHECK(cudaMemcpyAsync(this->device_ptrs[0], h_ptr, size, cudaMemcpyHostToDevice, this->stream));free(h_ptr);}this->infer();}if(_PRINT){printf("model warmup 5 times\n");}}
}void YOLOv8::letterBox(const cv::Mat& image, cv::Mat& out, cv::Size& size)
{const float inp_h = size.height;const float inp_w = size.width;float height = image.rows;float width = image.cols;float r = std::min(inp_h / height, inp_w / width);int padw = std::round(width * r);int padh = std::round(height * r);cv::Mat tmp;if ((int)width != padw || (int)height != padh) {cv::resize(image, tmp, cv::Size(padw, padh));}else {tmp = image.clone();}float dw = inp_w - padw;float dh = inp_h - padh;dw /= 2.0f;dh /= 2.0f;int top = int(std::round(dh - 0.1f));int bottom = int(std::round(dh + 0.1f));int left = int(std::round(dw - 0.1f));int right = int(std::round(dw + 0.1f));cv::copyMakeBorder(tmp, tmp, top, bottom, left, right, cv::BORDER_CONSTANT, {114, 114, 114});cv::dnn::blobFromImage(tmp, out, 1 / 255.f, cv::Size(), cv::Scalar(0, 0, 0), true, false, CV_32F);this->pparam.ratio = 1 / r;this->pparam.dw = dw;this->pparam.dh = dh;this->pparam.height = height;this->pparam.width = width;
}void YOLOv8::copyFromMat(const cv::Mat& image)
{cv::Mat nchw;auto& in_binding = this->input_bindings[0];auto width = in_binding.dims.d[3];auto height = in_binding.dims.d[2];cv::Size size{width, height};this->letterBox(image, nchw, size);this->context->setBindingDimensions(0, nvinfer1::Dims{4, {1, 3, height, width}});CHECK(cudaMemcpyAsync(this->device_ptrs[0], nchw.ptr<float>(), nchw.total() * nchw.elemSize(), cudaMemcpyHostToDevice, this->stream));
}void YOLOv8::copyFromMat(const cv::Mat& image, cv::Size& size)
{cv::Mat nchw;this->letterBox(image, nchw, size);this->context->setBindingDimensions(0, nvinfer1::Dims{4, {1, 3, size.height, size.width}});CHECK(cudaMemcpyAsync(this->device_ptrs[0], nchw.ptr<float>(), nchw.total() * nchw.elemSize(), cudaMemcpyHostToDevice, this->stream));
}void YOLOv8::infer()
{this->context->enqueueV2(this->device_ptrs.data(), this->stream, nullptr);for (int i = 0; i < this->num_outputs; i++) {size_t osize = this->output_bindings[i].size * this->output_bindings[i].dsize;CHECK(cudaMemcpyAsync(this->host_ptrs[i], this->device_ptrs[i + this->num_inputs], osize, cudaMemcpyDeviceToHost, this->stream));}cudaStreamSynchronize(this->stream);
}void YOLOv8::postprocess(std::vector<Object>& objs, float score_thres, float iou_thres, int topk, int num_labels)
{if(param.setPam){score_thres = param.score_thres;iou_thres = param.iou_thres;topk = param.topk;num_labels = param.num_labels;}objs.clear();auto num_channels = this->output_bindings[0].dims.d[1];auto num_anchors = this->output_bindings[0].dims.d[2];auto& dw = this->pparam.dw;auto& dh = this->pparam.dh;auto& width = this->pparam.width;auto& height = this->pparam.height;auto& ratio = this->pparam.ratio;std::vector<cv::Rect> bboxes;std::vector<float> scores;std::vector<int> labels;std::vector<int> indices;cv::Mat output = cv::Mat(num_channels, num_anchors, CV_32F, static_cast<float*>(this->host_ptrs[0]));output = output.t();for (int i = 0; i < num_anchors; i++) {auto row_ptr = output.row(i).ptr<float>();auto bboxes_ptr = row_ptr;auto scores_ptr = row_ptr + 4;auto max_s_ptr = std::max_element(scores_ptr, scores_ptr + num_labels);float score = *max_s_ptr;if (score > score_thres) {float x = *bboxes_ptr++ - dw;float y = *bboxes_ptr++ - dh;float w = *bboxes_ptr++;float h = *bboxes_ptr;float x0 = clamp((x - 0.5f * w) * ratio, 0.f, width);float y0 = clamp((y - 0.5f * h) * ratio, 0.f, height);float x1 = clamp((x + 0.5f * w) * ratio, 0.f, width);float y1 = clamp((y + 0.5f * h) * ratio, 0.f, height);int label = max_s_ptr - scores_ptr;cv::Rect_<float> bbox;bbox.x = x0;bbox.y = y0;bbox.width = x1 - x0;bbox.height = y1 - y0;bboxes.push_back(bbox);labels.push_back(label);scores.push_back(score);}}#ifdef BATCHED_NMScv::dnn::NMSBoxesBatched(bboxes, scores, labels, score_thres, iou_thres, indices);
#elsecv::dnn::NMSBoxes(bboxes, scores, score_thres, iou_thres, indices);
#endifint cnt = 0;for (auto& i : indices) {if (cnt >= topk) {break;}Object obj;obj.rect = bboxes[i];obj.prob = scores[i];obj.label = labels[i];objs.push_back(obj);cnt += 1;}
}void YOLOv8::draw_objects(const cv::Mat& image,cv::Mat& res,const std::vector<Object>& objs,const std::vector<std::string>& CLASS_NAMES,const std::vector<std::vector<unsigned int>>& COLORS)
{res = image.clone();for (auto& obj : objs) {cv::Scalar color = cv::Scalar(COLORS[obj.label][0], COLORS[obj.label][1], COLORS[obj.label][2]);cv::rectangle(res, obj.rect, color, 2);char text[256];sprintf(text, "%s %.1f%%", CLASS_NAMES[obj.label].c_str(), obj.prob * 100);int baseLine = 0;int x = (int)obj.rect.x;int y = (int)obj.rect.y + 1;y > res.rows ? res.rows : y;/ you can choose whether you need a background for text. // cv::Size label_size = cv::getTextSize(text, cv::FONT_HERSHEY_SIMPLEX, 0.4, 1, &baseLine);// cv::rectangle(res, cv::Rect(x, y, label_size.width, label_size.height + baseLine), {0, 0, 255}, -1);cv::putText(res, text, cv::Point(x, y), cv::FONT_HERSHEY_SIMPLEX, 0.4, {0, 0, 255}, 1);}
}
common.hpp
#ifndef COMMON_HPP
#define COMMON_HPP
#include "NvInfer.h"
#include "opencv2/opencv.hpp"
#include <sys/stat.h>
#include <unistd.h>#define CHECK(call) \do { \const cudaError_t error_code = call; \if (error_code != cudaSuccess) { \printf("CUDA Error:\n"); \printf(" File: %s\n", __FILE__); \printf(" Line: %d\n", __LINE__); \printf(" Error code: %d\n", error_code); \printf(" Error text: %s\n", cudaGetErrorString(error_code)); \exit(1); \} \} while (0)class Logger: public nvinfer1::ILogger
{
public:nvinfer1::ILogger::Severity reportableSeverity;explicit Logger(nvinfer1::ILogger::Severity severity = nvinfer1::ILogger::Severity::kINFO):reportableSeverity(severity){}void log(nvinfer1::ILogger::Severity severity, const char* msg) noexcept override{if (severity > reportableSeverity) {return;}switch (severity) {case nvinfer1::ILogger::Severity::kINTERNAL_ERROR:std::cerr << "INTERNAL_ERROR: ";break;case nvinfer1::ILogger::Severity::kERROR:std::cerr << "ERROR: ";break;case nvinfer1::ILogger::Severity::kWARNING:std::cerr << "WARNING: ";break;case nvinfer1::ILogger::Severity::kINFO:std::cerr << "INFO: ";break;default:std::cerr << "VERBOSE: ";break;}std::cerr << msg << std::endl;}
};inline int get_size_by_dims(const nvinfer1::Dims& dims)
{int size = 1;for (int i = 0; i < dims.nbDims; i++) {size *= dims.d[i];}return size;
}inline int type_to_size(const nvinfer1::DataType& dataType)
{switch (dataType) {case nvinfer1::DataType::kFLOAT:return 4;case nvinfer1::DataType::kHALF:return 2;case nvinfer1::DataType::kINT32:return 4;case nvinfer1::DataType::kINT8:return 1;case nvinfer1::DataType::kBOOL:return 1;default:return 4;}
}inline static float clamp(float val, float min, float max)
{return val > min ? (val < max ? val : max) : min;
}inline bool IsPathExist(const std::string& path)
{if (access(path.c_str(), 0) == F_OK) {return true;}return false;
}inline bool IsFile(const std::string& path)
{if (!IsPathExist(path)) {printf("%s:%d %s not exist\n", __FILE__, __LINE__, path.c_str());return false;}struct stat buffer;return (stat(path.c_str(), &buffer) == 0 && S_ISREG(buffer.st_mode));
}inline bool IsFolder(const std::string& path)
{if (!IsPathExist(path)) {return false;}struct stat buffer;return (stat(path.c_str(), &buffer) == 0 && S_ISDIR(buffer.st_mode));
}namespace det
{struct Binding {size_t size = 1;size_t dsize = 1;nvinfer1::Dims dims;std::string name;};struct Object {cv::Rect_<float> rect;int label = 0;float prob = 0.0;};struct PreParam {float ratio = 1.0f;float dw = 0.0f;float dh = 0.0f;float height = 0;float width = 0;};struct Parameter{bool setPam = false;float score_thres = 0.25f;float iou_thres = 0.65f;int topk = 100;int num_labels = 1;};
} // namespace det
#endif // COMMON_HPPCMakeList
cmake_minimum_required(VERSION 3.1)set(CMAKE_CUDA_ARCHITECTURES 60 61 62 70 72 75 86 89 90)
set(CMAKE_CUDA_COMPILER /usr/local/cuda/bin/nvcc)project(yolov8 LANGUAGES CXX CUDA)set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++14 -O3")
set(CMAKE_CXX_STANDARD 14)
set(CMAKE_BUILD_TYPE Release)
option(CUDA_USE_STATIC_CUDA_RUNTIME OFF)# CUDA
find_package(CUDA REQUIRED)
message(STATUS "CUDA Libs: \n${CUDA_LIBRARIES}\n")
get_filename_component(CUDA_LIB_DIR ${CUDA_LIBRARIES} DIRECTORY)
message(STATUS "CUDA Headers: \n${CUDA_INCLUDE_DIRS}\n")# OpenCV
find_package(OpenCV REQUIRED)
message(STATUS "OpenCV Libs: \n${OpenCV_LIBS}\n")
message(STATUS "OpenCV Libraries: \n${OpenCV_LIBRARIES}\n")
message(STATUS "OpenCV Headers: \n${OpenCV_INCLUDE_DIRS}\n")# TensorRT
set(TensorRT_INCLUDE_DIRS /usr/include/x86_64-linux-gnu)
set(TensorRT_LIBRARIES /usr/lib/x86_64-linux-gnu)message(STATUS "TensorRT Libs: \n${TensorRT_LIBRARIES}\n")
message(STATUS "TensorRT Headers: \n${TensorRT_INCLUDE_DIRS}\n")list(APPEND INCLUDE_DIRS${CUDA_INCLUDE_DIRS}${OpenCV_INCLUDE_DIRS}${TensorRT_INCLUDE_DIRS}include)list(APPEND ALL_LIBS${CUDA_LIBRARIES}${CUDA_LIB_DIR}${OpenCV_LIBRARIES}${TensorRT_LIBRARIES})include_directories(${INCLUDE_DIRS})add_executable(${PROJECT_NAME}main.cppyolov8.cppcommon.hpp)target_link_directories(${PROJECT_NAME} PUBLIC ${ALL_LIBS})
target_link_libraries(${PROJECT_NAME} PRIVATE nvinfer nvinfer_plugin cudart ${OpenCV_LIBS})if (${OpenCV_VERSION} VERSION_GREATER_EQUAL 4.7.0)message(STATUS "Build with -DBATCHED_NMS")add_definitions(-DBATCHED_NMS)
endif ()main.cpp
#include "chrono"
#include "opencv2/opencv.hpp"
#include "yolov8.h"
#include <iostream>using namespace std;const std::vector<std::string> CLASS_NAMES = {"blackPoint"};const std::vector<std::vector<unsigned int>> COLORS = {{0, 0, 255}};int main(int argc, char** argv)
{// cuda:0cudaSetDevice(0);const std::string engine_file_path{"/home/xiaoxin/Documents/ultralytics-main/last.engine"};const std::string path{"/home/xiaoxin/Documents/ultralytics-main/datasets/Tray/labelImg"};std::vector<std::string> imagePathList;bool isVideo{false};auto yolov8 = new YOLOv8(engine_file_path);yolov8->makePipe(true);if (IsFile(path)){std::string suffix = path.substr(path.find_last_of('.') + 1);if (suffix == "jpg" || suffix == "jpeg" || suffix == "png") {imagePathList.push_back(path);}else if (suffix == "mp4" || suffix == "avi" || suffix == "m4v" || suffix == "mpeg" || suffix == "mov"|| suffix == "mkv") {isVideo = true;}else {printf("suffix %s is wrong !!!\n", suffix.c_str());std::abort();}}else if (IsFolder(path)) {cv::glob(path + "/*.png", imagePathList);}cv::Mat res, image;cv::Size size = cv::Size{640, 640};yolov8->param.setPam = true;yolov8->param.num_labels = 1;yolov8->param.topk = 100;yolov8->param.score_thres = 0.25f;yolov8->param.iou_thres = 0.35f; // 0.65fstd::vector<Object> objs;cv::namedWindow("result", cv::WINDOW_AUTOSIZE);if (isVideo) {cv::VideoCapture cap(path);if (!cap.isOpened()) {printf("can not open %s\n", path.c_str());return -1;}while (cap.read(image)) {objs.clear();yolov8->copyFromMat(image, size);auto start = std::chrono::system_clock::now();yolov8->infer();auto end = std::chrono::system_clock::now();yolov8->postprocess(objs);yolov8->draw_objects(image, res, objs, CLASS_NAMES, COLORS);auto tc = (double)std::chrono::duration_cast<std::chrono::microseconds>(end - start).count() / 1000.;printf("cost %2.4lf ms\n", tc);cv::imshow("result", res);if (cv::waitKey(10) == 'q') {break;}}}else {for (auto& path : imagePathList) {objs.clear();image = cv::imread(path);yolov8->copyFromMat(image, size);auto start = std::chrono::system_clock::now();yolov8->infer();yolov8->postprocess(objs);yolov8->draw_objects(image, res, objs, CLASS_NAMES, COLORS);auto end = std::chrono::system_clock::now();auto tc = (double)std::chrono::duration_cast<std::chrono::microseconds>(end - start).count() / 1000.;printf("cost %2.4lf ms\n", tc);resize(res, res, cv::Size(0,0), 3, 3);cv::imshow("result", res);cv::waitKey(0);}}cv::destroyAllWindows();delete yolov8;return 0;
}相关文章:

【深度学习】C++ Tensorrt Yolov8 目标检测推理
C Tensorrt Yolov8 目标检测推理 模型导出代码yolov8.hyolov8.cppcommon.hppCMakeListmain.cpp C tensorrt对yolov8目标检测模型进行推理。 Windows版本下只需要修改common.hpp对文件的判断S_ISREG 和对文件夹的判断S_ISDIR即可,非核心代码,不调用删掉都…...

【项目日记(二)】搜索引擎-索引制作
❣博主主页: 33的博客❣ ▶️文章专栏分类:项目日记◀️ 🚚我的代码仓库: 33的代码仓库🚚 🫵🫵🫵关注我带你了解更多项目内容 目录 1.前言2.索引结构2.1创捷索引2.2根据索引查询2.3新增文档2.4内存索引保存到磁盘2.5把…...

K 近邻、K-NN 算法图文详解
1. 为什么学习KNN算法 KNN是监督学习分类算法,主要解决现实生活中分类问题。根据目标的不同将监督学习任务分为了分类学习及回归预测问题。 KNN(K-Nearest Neihbor,KNN)K近邻是机器学习算法中理论最简单,最好理解的算法…...

Eclipse + GDB + J-Link 的单片机程序调试实践
Eclipse GDB J-Link 的调试实践 本文介绍如何创建Eclipse的调试配置,如何控制调试过程,如何查看修改各种变量。 对 Eclipse 的要求 所用 Eclipse 应当安装了 Eclipse Embedded CDT 插件。从 https://www.eclipse.org/downloads/packages/ 下载 Ecli…...

前端代码生成辅助工具
1,Axure Axure设计的界面如何生成HTML文件 https://blog.csdn.net/qq_43279782/article/details/112387511 Axure 生成HTML 文件,并用Chrome打开 https://blog.csdn.net/qq_30718137/article/details/80621025 2,OpenUI [开源] OpenUI …...

静态库与动态库总结
一、库文件和头文件 所谓库文件,可以将其理解为压缩包文件,该文件内部通常包含不止一个目标文件(也就是二进制文件)。 值得一提的是,库文件中每个目标文件存储的代码,并非完整的程序,而是一个…...

深入解析tcpdump:网络数据包捕获与分析的利器
引言 在网络技术日新月异的今天,网络数据包的捕获与分析成为了网络管理员、安全专家以及开发人员不可或缺的技能。其中,tcpdump作为一款强大的网络数据包捕获分析工具,广泛应用于Linux系统中。本文将从技术人的角度,详细分析tcpdu…...

【漏洞复现】科立讯通信有限公司指挥调度管理平台uploadgps.php存在SQL注入
0x01 产品简介 科立讯通信指挥调度管理平台是一个专门针对通信行业的管理平台。该产品旨在提供高效的指挥调度和管理解决方案,以帮助通信运营商或相关机构实现更好的运营效率和服务质量。该平台提供强大的指挥调度功能,可以实时监控和管理通信网络设备、…...

什么是自然语言处理(NLP)?详细解读文本分类、情感分析和机器翻译的核心技术
什么是自然语言处理? 自然语言处理(Natural Language Processing,简称NLP)是人工智能的一个重要分支,旨在让计算机理解、解释和生成人类的自然语言。打个比方,你和Siri对话,或使用谷歌翻译翻译一…...

【linux】gcc快速入门教程
目录 一.gcc简介 二.gcc常用命令 一.gcc简介 gcc 是GNU Compiler Collection(GNU编译器套件)。就是一个编译器。编译一个源文件的时候可以直接使用,但是源文件数量太多时,就很不方便,于是就出现了make 工具 二.gcc…...
【多维动态规划】Leetcode 97. 交错字符串【中等】
交错字符串 给定三个字符串 s1、s2、s3,请你帮忙验证 s3 是否是由 s1 和 s2 交错 组成的。 两个字符串 s 和 t 交错 的定义与过程如下,其中每个字符串都会被分割成若干 非空 子字符串 子字符串 是字符串中连续的 非空 字符序列。 s s1 s2 … snt…...

【JavaScript脚本宇宙】精通前端开发:六大热门CSS框架详解
前端开发的利器:深入了解六大CSS框架 前言 在现代Web开发中,选择适合的前端框架和工具包是构建高效、响应式和美观的网站或应用程序的关键。本文将详细介绍六个广受欢迎的CSS框架:Bootstrap、Bulma、Tailwind CSS、Foundation、Materialize…...

开发技术-Java集合(List)删除元素的几种方式
文章目录 1. 错误的删除2. 正确的方法2.1 倒叙删除2.2 迭代器删除2.3 removeAll() 删除2.4 removeIf() 最简单的删除 3. 总结 1. 错误的删除 在写代码时,想将其中的一个元素删除,就遍历了 list ,使用了 remove(),发现效果并不是想…...

c++ 递归
递归函数是指在函数定义中调用自身的函数。C语言也支持递归函数。 下面是一个使用递归函数计算阶乘的例子: #include <iostream> using namespace std;int factorial(int n) {// 基本情况,当 n 等于 0 或 1 时,阶乘为 1if (n 0 || n…...
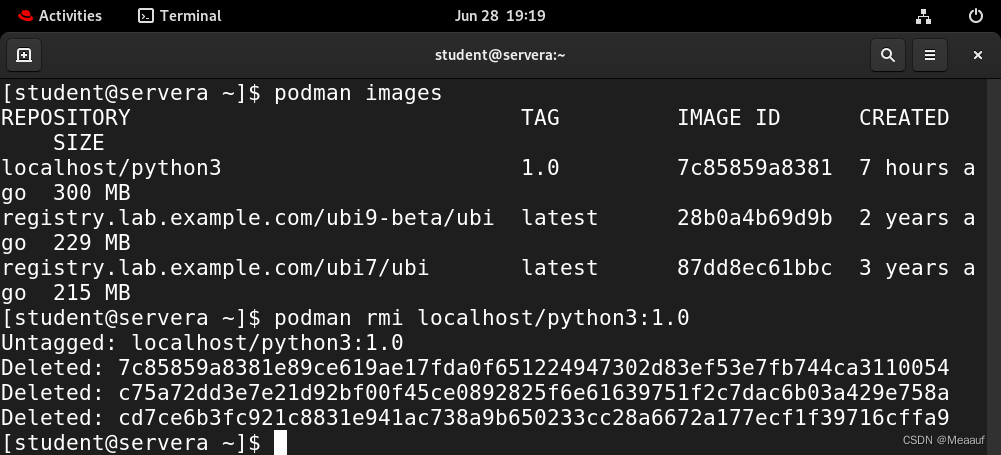
RedHat9 | podman容器
1、容器技术介绍 传统问题 应用程序和依赖需要一起安装在物理主机或虚拟机上的操作系统应用程序版本比当前操作系统安装的版本更低或更新两个应用程序可能需要某一软件的不同版本,彼此版本之间不兼容 解决方式 将应用程序打包并部署为容器容器是与系统的其他部分…...

边缘计算项目有哪些
边缘计算项目在多个领域得到了广泛的应用,以下是一些典型的边缘计算项目案例: 1. **智能交通系统**:通过在交通信号灯、监控摄像头等设备上部署边缘计算,可以实时分析交通流量,优化交通信号控制,减少拥堵&…...

计算fibonacci数列每一项时所需的递归调用次数
斐波那契数列是一个经典的数列,其中每一项是前两项的和,定义为: [ F(n) F(n-1) F(n-2) ] 其中,( F(0) 0 ) 和 ( F(1) 1 )。 对于计算斐波那契数列的第 ( n ) 项,如果使用简单的递归方法,其时间复杂度是…...

【教学类65-05】20240627秘密花园涂色书(中四班练习)
【教学类65-03】20240622秘密花园涂色书03(通义万相)(A4横版1张,一大 68张纸136份)-CSDN博客 背景需求: 打印以下几款秘密花园样式(每款10份)给中四班孩子玩一下,看看效果 【教学类…...
)
Python 学习之基础语法(一)
Python的语法基础主要包括以下几个方面,下面将逐一进行分点表示和归纳: 一、基本语法 1. 注释 a. 单行注释:使用#开头,例如# 这是一个单行注释。 b. 多行注释:使用三引号(可以是三个单引号或三个双引号&…...
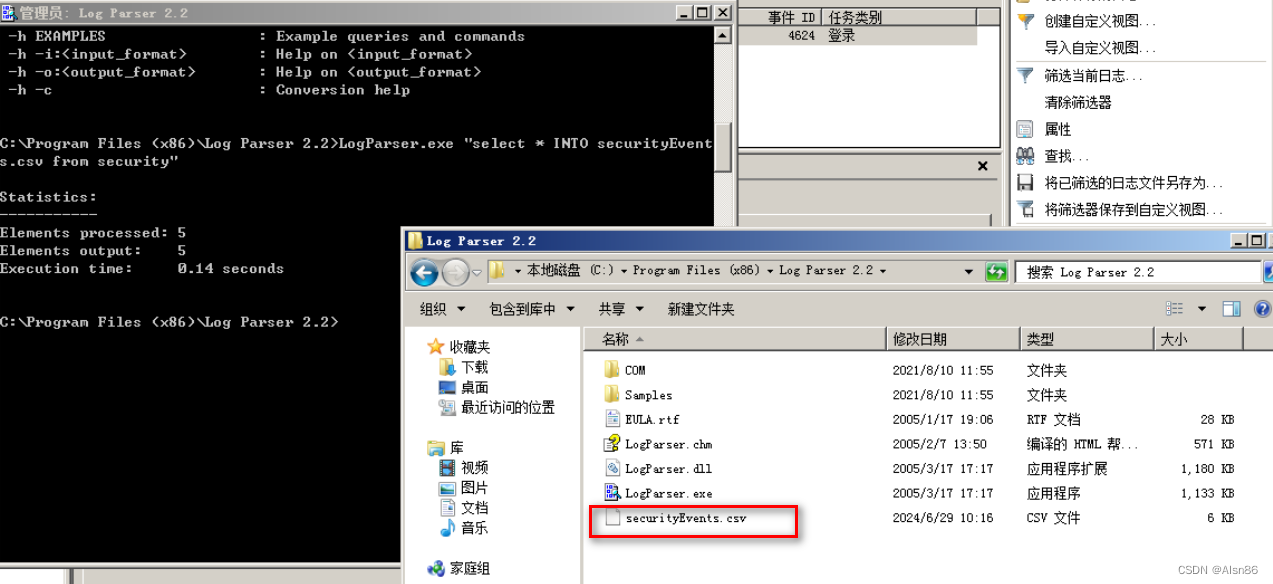
日志分析-windows系统日志分析
日志分析-windows系统日志分析 使用事件查看器分析Windows系统日志 cmd命令 eventvwr 筛选 清除日志、注销并重新登陆,查看日志情况 Windows7和Windowserver2008R2的主机日志保存在C:\Windows\System32\winevt\Logs文件夹下,Security.evtx即为W…...

利用ngx_stream_return_module构建简易 TCP/UDP 响应网关
一、模块概述 ngx_stream_return_module 提供了一个极简的指令: return <value>;在收到客户端连接后,立即将 <value> 写回并关闭连接。<value> 支持内嵌文本和内置变量(如 $time_iso8601、$remote_addr 等)&a…...

Python:操作 Excel 折叠
💖亲爱的技术爱好者们,热烈欢迎来到 Kant2048 的博客!我是 Thomas Kant,很开心能在CSDN上与你们相遇~💖 本博客的精华专栏: 【自动化测试】 【测试经验】 【人工智能】 【Python】 Python 操作 Excel 系列 读取单元格数据按行写入设置行高和列宽自动调整行高和列宽水平…...
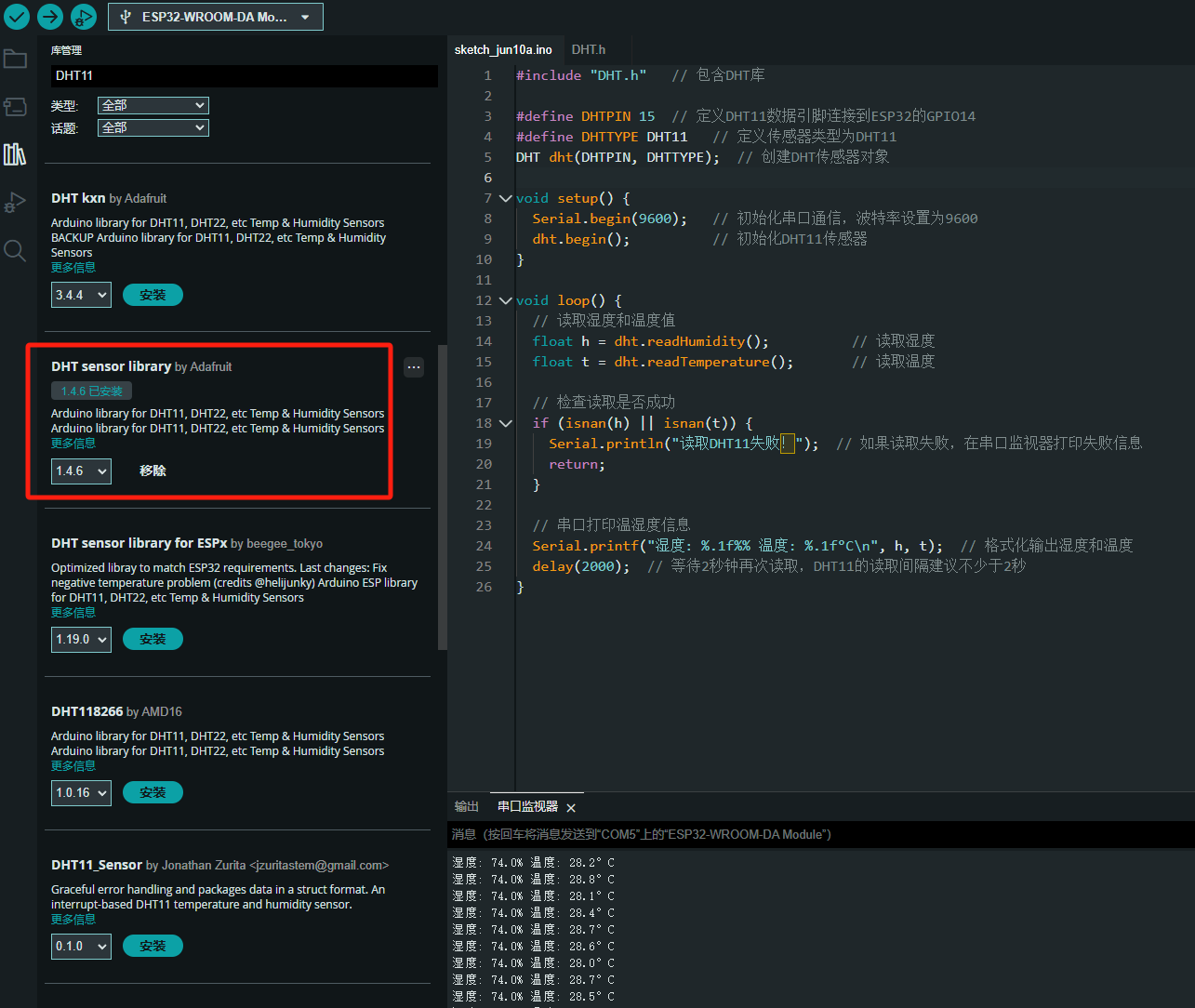
ESP32读取DHT11温湿度数据
芯片:ESP32 环境:Arduino 一、安装DHT11传感器库 红框的库,别安装错了 二、代码 注意,DATA口要连接在D15上 #include "DHT.h" // 包含DHT库#define DHTPIN 15 // 定义DHT11数据引脚连接到ESP32的GPIO15 #define D…...

OkHttp 中实现断点续传 demo
在 OkHttp 中实现断点续传主要通过以下步骤完成,核心是利用 HTTP 协议的 Range 请求头指定下载范围: 实现原理 Range 请求头:向服务器请求文件的特定字节范围(如 Range: bytes1024-) 本地文件记录:保存已…...
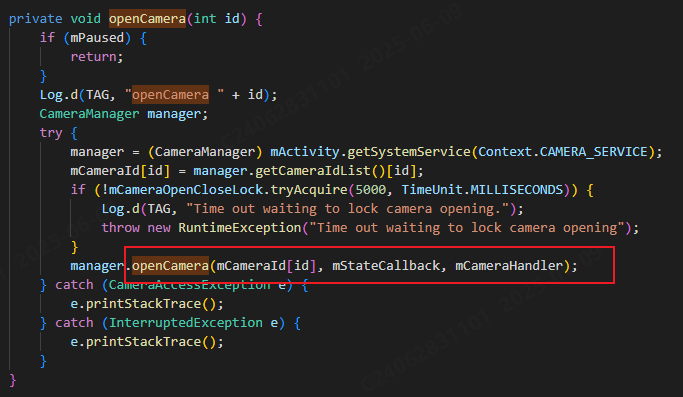
相机从app启动流程
一、流程框架图 二、具体流程分析 1、得到cameralist和对应的静态信息 目录如下: 重点代码分析: 启动相机前,先要通过getCameraIdList获取camera的个数以及id,然后可以通过getCameraCharacteristics获取对应id camera的capabilities(静态信息)进行一些openCamera前的…...

涂鸦T5AI手搓语音、emoji、otto机器人从入门到实战
“🤖手搓TuyaAI语音指令 😍秒变表情包大师,让萌系Otto机器人🔥玩出智能新花样!开整!” 🤖 Otto机器人 → 直接点明主体 手搓TuyaAI语音 → 强调 自主编程/自定义 语音控制(TuyaAI…...
:观察者模式)
JS设计模式(4):观察者模式
JS设计模式(4):观察者模式 一、引入 在开发中,我们经常会遇到这样的场景:一个对象的状态变化需要自动通知其他对象,比如: 电商平台中,商品库存变化时需要通知所有订阅该商品的用户;新闻网站中࿰…...
淘宝扭蛋机小程序系统开发:打造互动性强的购物平台
淘宝扭蛋机小程序系统的开发,旨在打造一个互动性强的购物平台,让用户在购物的同时,能够享受到更多的乐趣和惊喜。 淘宝扭蛋机小程序系统拥有丰富的互动功能。用户可以通过虚拟摇杆操作扭蛋机,实现旋转、抽拉等动作,增…...

Proxmox Mail Gateway安装指南:从零开始配置高效邮件过滤系统
💝💝💝欢迎莅临我的博客,很高兴能够在这里和您见面!希望您在这里可以感受到一份轻松愉快的氛围,不仅可以获得有趣的内容和知识,也可以畅所欲言、分享您的想法和见解。 推荐:「storms…...

ubuntu22.04 安装docker 和docker-compose
首先你要确保没有docker环境或者使用命令删掉docker sudo apt-get remove docker docker-engine docker.io containerd runc安装docker 更新软件环境 sudo apt update sudo apt upgrade下载docker依赖和GPG 密钥 # 依赖 apt-get install ca-certificates curl gnupg lsb-rel…...