YOLOv7-0.1部分代码阅读笔记-yolo.py
yolo.py
models\yolo.py
目录
yolo.py
1.所需的库和模块
2.class Detect(nn.Module):
3.class IDetect(nn.Module):
4.class IAuxDetect(nn.Module):
5.class IBin(nn.Module):
6.class Model(nn.Module):
7.def parse_model(d, ch):
8.if __name__ == '__main__':
1.所需的库和模块
import argparse
import logging
import sys
from copy import deepcopy# 用于配置模块路径和日志记录器。
# sys.path 是一个列表,包含了 Python 解释器搜索模块时会查找的目录路径。
# append('./') 将当前目录( . )添加到 sys.path 列表的末尾。
# 这样做的目的是为了让 Python 解释器能够找到当前目录下的模块或者子目录中的模块,使得可以直接运行子目录中的 Python 文件(例如 $ python file.py )而不需要改变当前的工作目录。
sys.path.append('./') # to run '$ python *.py' files in subdirectories
# logging 是 Python 的标准日志记录模块,用于跟踪事件的发生。
# getLogger(__name__) 创建或返回一个名为 __name__ 的日志记录器。
# __name__ 是一个内置变量,其值是当前模块的名称。
# 这行代码创建了一个日志记录器对象 logger ,可以用来记录日志信息,例如错误、警告、信息等。
# 通过使用 logger 对象,你可以在代码中添加日志语句,例如 logger.info("This is an info message") ,这些语句会在日志中记录相应的信息。
logger = logging.getLogger(__name__)from models.common import *
from models.experimental import *
from utils.autoanchor import check_anchor_order
from utils.general import make_divisible, check_file, set_logging
from utils.torch_utils import time_synchronized, fuse_conv_and_bn, model_info, scale_img, initialize_weights, \select_device, copy_attr
from utils.loss import SigmoidBintry:import thop # for FLOPS computation
except ImportError:thop = None2.class Detect(nn.Module):
# YOLOv7是一个目标检测模型,它在YOLO系列的基础上引入了一些新的组件和改进。 Detect 、 IDetect 、 IAuxDetect 和 IBin 是YOLOv7中的不同检测头,每个都有其特定的应用和特点。
# 1. Detect :
# 这是YOLOv7中的标准检测头,用于最终的目标检测任务。
# 它通常在模型的推理(测试)阶段使用,负责输出最终的检测结果。
# Detect 检测头适用于一般的目标检测任务,速度较快,但精度相对较低。
# 2. IDetect :
# IDetect 是YOLOv7中的一个改进检测头,它在标准检测头的基础上进行了优化,以提高检测精度。
# 它通常在模型的训练阶段使用,可能会包含一些额外的辅助特征或技术来提升性能。
# IDetect 模式适用于需要更高精度的目标检测任务,但速度相对较慢。
# 3. IAuxDetect :
# IAuxDetect 是YOLOv7中的辅助检测头,它在训练阶段使用,可以提升模型的召回率。
# 这种检测头通常会在模型的不同阶段添加额外的检测分支,以捕获更多层次的特征。
# IAuxDetect 模式适用于需要同时检测多个目标的任务,速度较快,但精度相对较低。
# 4. IBin :
# IBin 是YOLOv7中用于二值化图像目标检测的检测头。
# 它针对二值化图像进行了优化,可以提高在特定类型图像上的检测速度和精度。
# IBin 模式适用于二值化图像的目标检测任务,速度较快,但精度相对较低。
# 总的来说 :
# 这些检测头的主要区别在于它们的应用场景和性能特点。
# Detect 和 IDetect 更多关注于标准的单阶段检测任务。
# IAuxDetect 通过添加辅助分支来提升模型性能,尤其是在训练阶段。
# IBin 则是针对特定类型的图像(如二值化图像)进行优化的检测头。
# 在实际应用中,选择哪种检测头取决于具体的任务需求和性能要求。# 这段代码定义了一个名为 Detect 的类,它是 PyTorch 的 nn.Module 的子类,用于在 YOLOv7 或类似的目标检测模型中构建检测层。
# 定义了一个名为 Detect 的类,它继承自 PyTorch 的 nn.Module ,这是构建神经网络模型的基本类。
class Detect(nn.Module):# 类变量 stride 被设置为 None ,这意味着在构建模型时会计算步长。stride = None # strides computed during build 构建期间计算的步幅。# 类变量 export 被设置为 False ,表示模型默认不是用于 ONNX 导出的。export = False # onnx export onnx 导出。# 这是 Detect 类的构造函数,它接受三个参数。# 1.nc :类别数量,默认为80。# 2.anchors :锚点,默认为空元组。# 3.ch :通道数,默认为空元组。def __init__(self, nc=80, anchors=(), ch=()): # detection layer 检测层。# 调用父类 nn.Module 的构造函数。super(Detect, self).__init__()# 将传入的 nc 参数赋值给实例变量 self.nc ,表示类别的数量。self.nc = nc # number of classes 类别数量。# 计算每个锚点的输出数量,包括类别概率和边界框坐标。self.no = nc + 5 # number of outputs per anchor 每个锚框的输出数量。# 计算检测层的数量,即传入的 anchors 列表的长度。self.nl = len(anchors) # number of detection layers 检测层数量。# 计算每个检测层的锚点数量,假设 anchors 列表中的每个元素都是一对数值的列表。self.na = len(anchors[0]) // 2 # number of anchors 锚框数量。# 初始化一个网格列表,用于后续的坐标转换。self.grid = [torch.zeros(1)] * self.nl # init grid 初始化网格。# 将锚点数据转换为 PyTorch 张量,并调整其形状以匹配检测层的数量和每个层的锚点数量。a = torch.tensor(anchors).float().view(self.nl, -1, 2)# 将锚点张量注册为模型的缓冲区,这样它们就不会被视为模型参数,不会在训练中更新。self.register_buffer('anchors', a) # shape(nl,na,2)# 创建锚点网格的副本,并调整其形状以用于网格偏移计算。self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)# 创建一个模块列表 self.m ,其中包含输出卷积层。每个卷积层将输入通道数 x 转换为 self.no * self.na ,使用1x1卷积。self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv 输出转换。# 这段代码是 Detect 类的 forward 方法,它是 PyTorch 模型中定义前向传播逻辑的地方。 forward 方法定义了如何将输入数据 x 通过模型进行处理并产生输出。# 1.x :输入的特征图。def forward(self, x):# 这一行被注释掉了,如果取消注释,它将创建输入 x 的一个副本,这在性能分析时可能有用,因为它可以帮助避免在梯度计算中修改原始输入数据。# x = x.copy() # for profiling 用于分析。# 初始化一个空列表 z ,用于存储推理( inference )过程中的输出。z = [] # inference output 推理输出。# 代码使用了位运算符 |= ,它在这里的作用是将 self.training 和 self.export 的值进行逻辑或(OR)操作,并将结果赋值回 self.training 。# 如果 self.export 为 True ,则无论 self.training 的值如何, self.training 都会被设置为 True 。# 如果 self.export 为 False ,则 self.training 的值保持不变。# 这个操作的目的是确保在模型需要被导出为 ONNX 格式时,模型会被设置为训练模式。# 这一行代码设置了模型的训练模式。如果 self.export 为 True ,则 self.training 也将被设置为 True 。这通常用于确保在导出模型时,模型处于正确的模式。self.training |= self.export# 遍历所有的检测层, self.nl 是检测层的数量。for i in range(self.nl):# 对每个检测层的输入 x[i] 应用对应的卷积层 self.m[i] ,并将结果保存回 x[i] 。x[i] = self.m[i](x[i]) # conv# 获取当前检测层输出的张量 x[i] 的形状,并将其分解为批量大小 bs 、 通道数 _ 、 高度 ny 和 宽度 nx 。bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)# 将 x[i] 的形状重新调整为 (batch_size, num_anchors, num_outputs_per_anchor, height, width) 。# permute(0, 1, 3, 4, 2) 重新排序维度,将类别和边界框坐标放在一起,形成 (batch_size, num_anchors, height, width, num_outputs_per_anchor) 的形状。# contiguous() 确保张量在内存中是连续存储的,这对于某些 PyTorch 操作是必要的。x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()# 这个条件判断表示如果模型不在训练模式(即处于推理模式),则执行以下代码块。if not self.training: # inference 推理。# 检查第 i 个检测层的网格 self.grid[i] 的形状(具体是高度和宽度)是否与输入特征图 x[i] 的形状相匹配。if self.grid[i].shape[2:4] != x[i].shape[2:4]:# def _make_grid(nx=20, ny=20): -> 用于生成一个网格,这个网格在目标检测模型中用于将预测的边界框坐标从模型空间转换到图像空间。 -> return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()# 如果网格的形状不匹配,调用 _make_grid 方法创建一个新的网格,并将其移动到与 x[i] 相同的设备(CPU或GPU)。self.grid[i] = self._make_grid(nx, ny).to(x[i].device)# 对第 i 个检测层的输出 x[i] 应用 sigmoid 激活函数,得到预测的边界框坐标和类别概率。y = x[i].sigmoid()# 将 sigmoid 激活后的边界框中心坐标(x, y)进行缩放和平移,计算出实际的边界框中心坐标。这里 2. - 0.5 是将 sigmoid 的输出范围从 (0, 1) 映射到 (-1, 1)。y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy# 将 sigmoid 激活后的边界框宽度和高度进行缩放,计算出实际的边界框宽度和高度。这里 *2 是将 sigmoid 的输出范围从 (0, 1) 映射到 (0, 2),然后平方得到实际的宽度和高度,再乘以对应的锚点尺寸。y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh# 将处理后的预测结果 y 重新排列形状,并添加到列表 z 中,以便后续的拼接操作。z.append(y.view(bs, -1, self.no))# 如果模型处于训练模式,直接返回输入 x 。# 如果模型处于推理模式,将列表 z 中的所有预测结果拼接起来,并与原始输入 x 一起返回。 torch.cat(z, 1) 表示沿着第二个维度(即特征维度)进行拼接。return x if self.training else (torch.cat(z, 1), x)# 这段代码是 Detect 类的一个静态方法 _make_grid ,它用于生成一个网格,这个网格在目标检测模型中用于将预测的边界框坐标从模型空间转换到图像空间。# 这个装饰器表示 _make_grid 方法是一个静态方法,它不需要访问类的实例变量或方法,只能访问类的类变量。@staticmethod# 定义了一个静态方法 _make_grid ,它接受两个参数 1.nx 和 2.ny ,分别表示网格的宽度和高度,默认值都是20。def _make_grid(nx=20, ny=20):# 使用 torch.arange 生成两个张量,分别包含从0到 ny-1 和从0到 nx-1 的整数序列。 torch.meshgrid 函数接受两个张量作为输入,生成两个二维网格 yv 和 xv ,分别代表网格的y坐标和x坐标。yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])# torch.stack((xv, yv), 2) 将 xv 和 yv 沿着新的维度(第三维)堆叠起来,形成一个形状为 (ny, nx, 2) 的张量,其中最后一个维度2表示x和y坐标。# .view((1, 1, ny, nx, 2)) 将堆叠后的张量重新调整形状,添加两个新的维度(批量大小和特征维度),使其形状变为 (1, 1, ny, nx, 2) ,这与模型输出的形状相匹配。# .float() 将张量的数据类型转换为浮点数,以便于后续的计算。return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()3.class IDetect(nn.Module):
# 这段代码定义了一个名为 IDetect 的类,它是 PyTorch 的 nn.Module 的子类,用于构建一个检测层,这个检测层是为了处理隐式( implicit )或连续的表示方法,如连续的锚点( anchor-free )检测方法。
class IDetect(nn.Module):# 类变量 stride 被设置为 None ,这意味着在构建模型时会计算步长。stride = None # strides computed during build 构建期间计算的步幅。# 类变量 export 被设置为 False ,表示模型默认不是用于 ONNX 导出的。export = False # onnx export onnx 导出。# 这是 IDetect 类的构造函数,它接受三个参数 。# 1.nc :类别数量,默认为80。# 2.anchors :锚点,默认为空元组。# 3.ch :通道数,默认为空元组。def __init__(self, nc=80, anchors=(), ch=()): # detection layer 检测层super(IDetect, self).__init__()# 将传入的 nc 参数赋值给实例变量 self.nc ,表示类别的数量。self.nc = nc # number of classes# 计算每个锚点的输出数量,包括类别概率和边界框坐标。self.no = nc + 5 # number of outputs per anchor# 计算检测层的数量,即传入的 anchors 列表的长度。self.nl = len(anchors) # number of detection layers# 计算每个检测层的锚点数量,假设 anchors 列表中的每个元素都是一对数值的列表。self.na = len(anchors[0]) // 2 # number of anchors# 初始化一个网格列表,用于后续的坐标转换。self.grid = [torch.zeros(1)] * self.nl # init grid# 将锚点数据转换为 PyTorch 张量,并调整其形状以匹配检测层的数量和每个层的锚点数量。a = torch.tensor(anchors).float().view(self.nl, -1, 2)# 将锚点张量注册为模型的缓冲区,这样它们就不会被视为模型参数,不会在训练中更新。self.register_buffer('anchors', a) # shape(nl,na,2)# 创建锚点网格的副本,并调整其形状以用于网格偏移计算。# 在 PyTorch 中, register_buffer 方法用于注册一个不应该被视为模型参数的缓冲区(buffer)。这意味着这个缓冲区不会被优化器(optimizer)更新,也不会在模型参数列表中显示,但它会在模型的 state dict 中保存,因此可以在模型加载时恢复其值。# a.clone() 创建了锚点张量 a 的一个副本,以确保原始锚点数据不会被后续操作修改。# .view(self.nl, 1, -1, 1, 1, 2) 重新调整了锚点张量的形状。这里的 -1 表示让 PyTorch 自动计算该维度的大小,以便保持总元素数量不变。这样, a 被重新塑形为一个六维张量,其形状为 (self.nl, 1, na, 1, 1, 2) ,其中。# self.nl :是检测层的数量。# 1 :是批次维度(batch dimension)。# na :是每个检测层的锚点数量。# 1 和 1 是空间维度,表示网格的高度和宽度(在这里是单点,因为锚点是相对于网格中心的偏移)。# 2 :表示每个锚点的两个维度(通常是宽度和高度)。# 将重新调整形状后的锚点张量注册为名为 anchor_grid 的缓冲区。这样, anchor_grid 就会在模型的状态字典(state dict)中保存,但在模型参数更新时不会被改变。self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)# 创建一个模块列表 self.m ,其中包含输出卷积层。每个卷积层将输入通道数 x 转换为 self.no * self.na ,使用1x1卷积。self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv# 创建一个模块列表 self.ia ,其中包含 ImplicitA 模块,这些模块可能用于处理隐式表示的锚点。# 对于 ch 列表中的每个通道数 x ,都会创建一个 ImplicitA 模块的实例,并将其添加到 self.ia 模块列表中。# class ImplicitA(nn.Module):# -> ImplicitA 类是一个PyTorch模块,它实现了一个隐式层(Implicit Layer),这种层可以在不增加额外计算负担的情况下,为网络提供额外的学习能力。# -> def __init__(self, channel, mean=0., std=.02):# -> 输入 x 与 self.implicit 参数相加后输出。这种操作等效于在输入特征图上应用了一个1x1的卷积,但是这个卷积核是可学习的,并且在训练过程中会被优化。# -> return self.implicit + xself.ia = nn.ModuleList(ImplicitA(x) for x in ch)# 创建一个模块列表 self.im ,其中包含 ImplicitM 模块,这些模块可能用于处理隐式表示的边界框坐标。# for _ in ch 是一个生成器表达式,它遍历 ch 列表中的每个元素,但这里使用下划线 _ 作为变量名,表示我们不关心列表中的值,只是需要迭代次数与 ch 列表的长度相同。# 因此,对于 ch 列表中的每个元素,都会创建一个 ImplicitM 模块的实例,并将其添加到 self.im 模块列表中。# class ImplicitM(nn.Module):# -> def __init__(self, channel, mean=0., std=.02):# -> # 输入 x 与 self.implicit 参数逐元素相乘后输出。这种操作等效于在输入特征图上应用了一个1x1的逐元素乘法操作,但是这个乘法因子是可学习的,并且在训练过程中会被优化。# ->return self.implicit * xself.im = nn.ModuleList(ImplicitM(self.no * self.na) for _ in ch)# 1.x :代表输入的特征图列表。def forward(self, x):# 这一行被注释掉了,如果取消注释,它将创建输入 x 的一个副本,这在性能分析时可能有用,因为它可以帮助避免在梯度计算中修改原始输入数据。# x = x.copy() # for profiling# 初始化一个空列表 z ,用于存储推理(inference)过程中的输出。z = [] # inference output# 代码使用了位运算符 |= ,它在这里的作用是将 self.training 和 self.export 的值进行逻辑或(OR)操作,并将结果赋值回 self.training 。# 如果 self.export 为 True ,则无论 self.training 的值如何, self.training 都会被设置为 True 。# 如果 self.export 为 False ,则 self.training 的值保持不变。# 这个操作的目的是确保在模型需要被导出为 ONNX 格式时,模型会被设置为训练模式。self.training |= self.export# 遍历所有的检测层, self.nl 是检测层的数量。for i in range(self.nl):# 对每个检测层的输入 x[i] 应用 ImplicitA 模块,然后应用卷积层 self.m[i] 。这里 self.ia[i] 可能是用于处理隐式表示的锚点的模块,而 self.m[i] 是输出卷积层。x[i] = self.m[i](self.ia[i](x[i])) # conv# 将 x[i] 的输出传递给 ImplicitM 模块,这可能是用于处理隐式表示的边界框坐标的模块。x[i] = self.im[i](x[i])# 获取当前检测层输出的张量 x[i] 的形状,并将其分解为 批量大小 bs 、 通道数 _ 、 高度 ny 和宽度 nx 。bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)# 将 x[i] 的形状重新调整为 (batch_size, num_anchors, num_outputs_per_anchor, height, width) 。# permute(0, 1, 3, 4, 2) 重新排序维度,将类别和边界框坐标放在一起,形成 (batch_size, num_anchors, height, width, num_outputs_per_anchor) 的形状。# contiguous() 确保张量在内存中是连续存储的,这对于某些 PyTorch 操作是必要的。x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()# 这个条件判断表示如果模型不在训练模式(即处于推理模式),则执行以下代码块。if not self.training: # inference# 检查第 i 个检测层的网格 self.grid[i] 的形状(具体是高度和宽度)是否与输入特征图 x[i] 的形状相匹配。if self.grid[i].shape[2:4] != x[i].shape[2:4]:# 如果网格的形状不匹配,调用 _make_grid 方法创建一个新的网格,并将其移动到与 x[i] 相同的设备(CPU或GPU)。# def _make_grid(nx=20, ny=20): -> 它用于生成一个网格,这个网格在目标检测模型中用于将预测的边界框坐标从模型空间转换到图像空间。 -> return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()self.grid[i] = self._make_grid(nx, ny).to(x[i].device)# 对第 i 个检测层的输出 x[i] 应用 sigmoid 激活函数。这通常用于将模型输出的原始分数转换为概率值,特别是在类别概率和边界框坐标的预测中。y = x[i].sigmoid()# 这部分代码处理边界框的中心坐标 (x, y) 。sigmoid 函数的输出范围是 (0, 1),乘以 2 并减去 0.5 将其映射到 (-1, 1)。# 然后加上网格坐标 self.grid[i] (它包含了特征图上每个单元格的中心坐标),最后乘以步长 self.stride[i] 来将坐标从 特征图空间 转换到 原始图像空间 。y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy# 这部分代码处理边界框的 宽度 和 高度 。sigmoid 函数的输出范围是 (0, 1),乘以 2 将其映射到 (0, 2),然后平方得到边界框的宽度和高度的缩放因子。# 这个缩放因子再乘以锚点网格 self.anchor_grid[i] (它包含了每个锚点的宽度和高度),得到最终的 边界框尺寸 。y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh# 将处理后的预测结果 y 重新排列形状,使其变为 (batch_size, num_anchors * grid_height * grid_width, num_outputs_per_anchor) 的形状,然后添加到列表 z 中。# 这里 bs 是批量大小, -1 表示自动计算剩余的维度, self.no 是每个锚点的输出数量(包括类别概率和边界框坐标)。z.append(y.view(bs, -1, self.no))# 如果模型处于训练模式,直接返回输入 x 。# 如果模型处于推理模式,将列表 z 中的所有预测结果拼接起来,并与原始输入 x 一起返回。 torch.cat(z, 1) 表示沿着第二个维度(即特征维度)进行拼接。return x if self.training else (torch.cat(z, 1), x)# 这段代码定义了一个静态方法 _make_grid ,它用于生成一个网格,这个网格在目标检测模型中用于将预测的边界框坐标从模型空间转换到图像空间。# 这个装饰器表示 _make_grid 方法是一个静态方法,它不需要访问类的实例变量或方法,只能访问类的类变量。@staticmethod# 它接受两个参数 1.nx 和 2.ny ,分别表示网格的宽度和高度,默认值都是20。def _make_grid(nx=20, ny=20):# 使用 torch.arange 生成两个张量,分别包含从0到 ny-1 和从0到 nx-1 的整数序列。# torch.meshgrid 函数接受两个张量作为输入,生成两个二维网格 yv 和 xv ,分别代表网格的y坐标和x坐标。yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])# torch.stack((xv, yv), 2) 将 xv 和 yv 沿着新的维度(第三维)堆叠起来,形成一个形状为 (ny, nx, 2) 的张量,其中最后一个维度2表示x和y坐标。# .view((1, 1, ny, nx, 2)) 将堆叠后的张量重新调整形状,添加两个新的维度(批量大小和特征维度),使其形状变为 (1, 1, ny, nx, 2) ,这与模型输出的形状相匹配。# .float() 将张量的数据类型转换为浮点数,以便于后续的计算。return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()4.class IAuxDetect(nn.Module):
# 这段代码定义了一个名为 IAuxDetect 的类,它是 PyTorch 的 nn.Module 的子类,用于构建一个辅助检测层,这个检测层似乎是为了处理隐式(implicit)或连续的表示方法,如连续的锚点(anchor-free)检测方法。
class IAuxDetect(nn.Module):# 类变量 stride 被设置为 None ,这意味着在构建模型时会计算步长。stride = None # strides computed during build# 类变量 export 被设置为 False ,表示模型默认不是用于 ONNX 导出的。export = False # onnx export# 1.nc :类别数量,默认为80。# 2.anchors :锚点,默认为空元组。# 3.ch :通道数,默认为空元组。def __init__(self, nc=80, anchors=(), ch=()): # detection layersuper(IAuxDetect, self).__init__()# 将传入的 nc 参数赋值给实例变量 self.nc ,表示类别的数量。self.nc = nc # number of classes# 计算每个锚点的输出数量,包括类别概率和边界框坐标。self.no = nc + 5 # number of outputs per anchor# 计算检测层的数量,即传入的 anchors 列表的长度。self.nl = len(anchors) # number of detection layers# 计算每个检测层的锚点数量,假设 anchors 列表中的每个元素都是一对数值的列表。self.na = len(anchors[0]) // 2 # number of anchors# 这行代码初始化一个名为 self.grid 的列表,列表中的每个元素都是一个形状为 (1,) 的零张量。这个列表用于存储每个检测层的网格信息,网格信息在将模型输出的边界框坐标转换到图像空间时使用。 self.nl 是检测层的数量。self.grid = [torch.zeros(1)] * self.nl # init grid# 这行代码将传入的 anchors 参数转换为一个 PyTorch 张量,并将其数据类型转换为浮点数。然后,使用 .view(self.nl, -1, 2) 调整张量的形状,使其成为一个三维张量,# 其中, self.nl :是检测层的数量。 -1 :表示自动计算该维度的大小,这样每个检测层都有其对应的锚点。 2 :表示每个锚点有两个维度(通常是宽度和高度)。a = torch.tensor(anchors).float().view(self.nl, -1, 2)# 这行代码使用 register_buffer 方法将调整形状后的锚点张量 a 注册为模型的一个缓冲区,命名为 'anchors' 。# 这意味着这些锚点数据会在模型的状态字典(state dict)中保存,但不会被优化器更新。这个缓冲区的形状是 (nl, na, 2) ,其中 na 是每个检测层的锚点数量。self.register_buffer('anchors', a) # shape(nl,na,2)# 这行代码首先克隆了锚点张量 a ,以避免修改原始数据。# 然后,使用 .view(self.nl, 1, -1, 1, 1, 2) 调整克隆后的张量的形状,使其成为一个六维张量,这个张量将用于在模型的前向传播中将预测的边界框坐标从 特征图空间 转换到 图像空间 。# 最后,使用 register_buffer 方法将这个张量注册为模型的另一个缓冲区,命名为 'anchor_grid' 。self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)# 这行代码创建了一个 nn.ModuleList ,包含一系列的 nn.Conv2d 卷积层,用于处理前半部分的特征图(由 ch[:self.nl] 指定)。# 每个卷积层将输入通道数 x 转换为 self.no * self.na ,其中 self.no 是每个锚点的输出数量(包括类别概率和边界框坐标), self.na 是每个检测层的锚点数量。# 卷积核大小为 1x1,这意味着这些卷积层实际上是在执行线性变换。self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch[:self.nl]) # output conv# 这行代码创建了另一个 nn.ModuleList ,包含一系列的 nn.Conv2d 卷积层,用于处理后半部分的特征图(由 ch[self.nl:] 指定)。这些卷积层的配置与 self.m 中的相同。self.m2 = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch[self.nl:]) # output conv# 这行代码创建了一个 nn.ModuleList ,包含一系列的 ImplicitA 模块,这些模块用于处理前半部分的特征图。 ImplicitA 模块与隐式表示的锚点有关。self.ia = nn.ModuleList(ImplicitA(x) for x in ch[:self.nl])# 这行代码创建了另一个 nn.ModuleList ,包含一系列的 ImplicitM 模块,这些模块用于处理前半部分的特征图。 ImplicitM 模块与隐式表示的边界框坐标有关。self.im = nn.ModuleList(ImplicitM(self.no * self.na) for _ in ch[:self.nl])# 1.x :代表输入的特征图列表。def forward(self, x):# x = x.copy() # for profiling# 初始化一个空列表 z ,用于存储推理(inference)过程中的输出。z = [] # inference output# 代码使用了位运算符 |= ,它在这里的作用是将 self.training 和 self.export 的值进行逻辑或(OR)操作,并将结果赋值回 self.training 。# 如果 self.export 为 True ,则无论 self.training 的值如何, self.training 都会被设置为 True 。# 如果 self.export 为 False ,则 self.training 的值保持不变。# 这个操作的目的是确保在模型需要被导出为 ONNX 格式时,模型会被设置为训练模式。self.training |= self.export# 遍历所有的检测层, self.nl 是检测层的数量。for i in range(self.nl):# 对每个检测层的输入 x[i] 应用 ImplicitA 模块,然后应用卷积层 self.m[i] 。这里 self.ia[i] 是用于处理隐式表示的锚点的模块,而 self.m[i] 是输出卷积层。x[i] = self.m[i](self.ia[i](x[i])) # conv# 将 x[i] 的输出传递给 ImplicitM 模块,这是用于处理隐式表示的边界框坐标的模块。x[i] = self.im[i](x[i])# 获取当前检测层输出的张量 x[i] 的形状,并将其分解为 批量大小 bs 、 通道数 _ 、 高度 ny 和 宽度 nx 。# 这里注释中的 x(bs,255,20,20) to x(bs,3,20,20,85) 是一个示例,说明输入张量的形状从 (批量大小, 255, 20, 20) 转换为 (批量大小, 3, 20, 20, 85)。# 其中 255 :是输入通道数。 3 :是锚点数量乘以每个锚点的输出数量(例如,每个锚点输出边界框坐标和类别概率)。 85 :是类别数量加上边界框坐标的数量。bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)# .view(bs, self.na, self.no, ny, nx) :将第 i 个检测层的输出 x[i] 重新调整形状为 (batch_size, num_anchors, num_outputs_per_anchor, height, width) 。# 这里 bs :是批量大小, self.na :是每个检测层的锚点数量, self.no :是每个锚点的输出数量(包括类别概率和边界框坐标), ny 和 nx :分别是特征图的高度和宽度。# .permute(0, 1, 3, 4, 2) :重新排序维度,将类别和边界框坐标放在一起,形成 (batch_size, num_anchors, height, width, num_outputs_per_anchor) 的形状。这样做是为了将空间维度(高度和宽度)放在连续的维度上,便于后续处理。# .contiguous() :确保张量在内存中是连续存储的,这对于某些 PyTorch 操作是必要的。x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()# 这行代码处理后半部分的特征图(由 self.m2 指定)。它将第 i+self.nl 个特征图传递给对应的卷积层 self.m2[i] 进行处理。x[i+self.nl] = self.m2[i](x[i+self.nl])# 这行代码与第一段代码类似,对 self.m2[i] 的输出进行形状调整和维度重新排序,以匹配前半部分特征图的处理方式。x[i+self.nl] = x[i+self.nl].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()# 这个条件判断表示如果模型不在训练模式(即处于推理模式),则执行以下代码块。if not self.training: # inference# 检查第 i 个检测层的网格 self.grid[i] 的形状(具体是高度和宽度)是否与输入特征图 x[i] 的形状相匹配。if self.grid[i].shape[2:4] != x[i].shape[2:4]:# 如果网格的形状不匹配,调用 _make_grid 方法创建一个新的网格,并将其移动到与 x[i] 相同的设备(CPU或GPU)。self.grid[i] = self._make_grid(nx, ny).to(x[i].device)# 对第 i 个检测层的输出 x[i] 应用 sigmoid 激活函数,得到预测的边界框坐标和类别概率。y = x[i].sigmoid()# 将 sigmoid 激活后的边界框中心坐标(x, y)进行缩放和平移,计算出 实际的边界框中心坐标 。这里 2. - 0.5 是将 sigmoid 的输出范围从 (0, 1) 映射到 (-1, 1)。y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy# 将 sigmoid 激活后的边界框宽度和高度进行缩放,计算出 实际的边界框宽度和高度 。这里 *2 是将 sigmoid 的输出范围从 (0, 1) 映射到 (0, 2),然后平方得到实际的宽度和高度,再乘以对应的锚点尺寸。y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh# 将处理后的预测结果 y 重新排列形状,并添加到列表 z 中,以便后续的拼接操作。z.append(y.view(bs, -1, self.no))# 如果模型处于训练模式,直接返回输入 x 。# 如果模型处于推理模式,将列表 z 中的所有预测结果拼接起来,并与原始输入 x 的前半部分(即 x[:self.nl] )一起返回。 torch.cat(z, 1) 表示沿着第二个维度(即特征维度)进行拼接。return x if self.training else (torch.cat(z, 1), x[:self.nl])# 这段代码定义了一个静态方法 _make_grid ,它用于生成一个网格,这个网格在目标检测模型中用于将预测的边界框坐标从模型空间转换到图像空间。@staticmethoddef _make_grid(nx=20, ny=20):yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])# torch.stack((xv, yv), 2) 将 xv 和 yv 沿着新的维度(第三维)堆叠起来,形成一个形状为 (ny, nx, 2) 的张量,其中最后一个维度2表示x和y坐标。# .view((1, 1, ny, nx, 2)) 将堆叠后的张量重新调整形状,添加两个新的维度(批量大小和特征维度),使其形状变为 (1, 1, ny, nx, 2) ,这与模型输出的形状相匹配。# .float() 将张量的数据类型转换为浮点数,以便于后续的计算。return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()5.class IBin(nn.Module):
# 这段代码扩展了 IBin 类的定义,提供了更多的细节和上下文。 IBin 类是 PyTorch 的 nn.Module 的子类,用于构建一个目标检测模型中的检测层,这个检测层特别关注于边界框的宽度和高度的 bin 化表示
class IBin(nn.Module):# 类变量 stride 被设置为 None ,这意味着在构建模型时会计算步长。stride = None # strides computed during buildexport = False # onnx export# 这是 IBin 类的构造函数,它接受四个参数。# 1.nc :类别数量,默认为80。# 2.anchors :锚点,默认为空元组。# 3.ch :通道数,默认为空元组。# 4.bin_count :bin的数量,默认为21。def __init__(self, nc=80, anchors=(), ch=(), bin_count=21): # detection layersuper(IBin, self).__init__()# 将传入的 nc 参数赋值给实例变量 self.nc ,表示类别的数量。self.nc = nc # number of classes# 将传入的 bin_count 参数赋值给实例变量 self.bin_count ,表示边界框尺寸预测时使用的bin的数量。self.bin_count = bin_count# 初始化了两个 SigmoidBin 实例,分别用于处理边界框宽度和高度的 bin 化表示,并计算了模型输出的总维度 self.no 。# 创建一个 SigmoidBin 实例,用于边界框宽度的 bin 化表示。 bin_count :参数指定了 bin 的数量, min 和 max :参数定义了宽度 bin 的范围,这里是从 0.0 到 4.0。# class SigmoidBin(nn.Module):# -> def __init__(self, bin_count=10, min=0.0, max=1.0, reg_scale = 2.0, use_loss_regression=True, use_fw_regression=True, BCE_weight=1.0, smooth_eps=0.0):# -> def get_length(self): -> 这个方法的作用是返回类的实例变量 self.length 的值。 -> return self.length# -> def forward(self, pred): -> 根据 SigmoidBin 类的配置计算出最终的预测结果。返回最终的预测结果。 -> return result# -> def training_loss(self, pred, target): -> 它用于在训练过程中计算预测值和目标值之间的损失。返回总损失 loss 和最终的 预测结果 out_result 。 -> return loss, out_resultself.w_bin_sigmoid = SigmoidBin(bin_count=self.bin_count, min=0.0, max=4.0)# 创建另一个 SigmoidBin 实例,用于边界框高度的 bin 化表示。参数与宽度相同。self.h_bin_sigmoid = SigmoidBin(bin_count=self.bin_count, min=0.0, max=4.0)# classes, x,y,obj# 计算每个锚点的输出数量 self.no 。# 这个数量包括 :# nc :类别数量。# 3 :通常代表边界框的中心坐标 (x, y) 和对象存在的概率。# self.w_bin_sigmoid.get_length() :宽度 bin 的输出长度,即宽度 bin 的数量。# self.h_bin_sigmoid.get_length() :高度 bin 的输出长度,即高度 bin 的数量。self.no = nc + 3 + \self.w_bin_sigmoid.get_length() + self.h_bin_sigmoid.get_length() # w-bce, h-bce# + self.x_bin_sigmoid.get_length() + self.y_bin_sigmoid.get_length()# 计算检测层的数量,即传入的 anchors 列表的长度,并将其存储在实例变量 self.nl 中。self.nl = len(anchors) # number of detection layers# 计算每个检测层的锚点数量。由于 anchors 列表中的每个元素都是一对数值的列表,所以通过除以2来计算锚点数量,并将其存储在实例变量 self.na 中。self.na = len(anchors[0]) // 2 # number of anchors# 初始化一个网格列表 self.grid ,列表中的每个元素都是一个形状为 (1,) 的零张量。这个列表用于存储每个检测层的网格信息。self.grid = [torch.zeros(1)] * self.nl # init grid# 将传入的 anchors 参数转换为一个 PyTorch 张量,并将其数据类型转换为浮点数。然后,使用 .view(self.nl, -1, 2) 调整张量的形状,使其成为一个三维张量,其中。# self.nl :是检测层的数量。# -1 :表示自动计算该维度的大小,这样每个检测层都有其对应的锚点。# 2 :表示每个锚点有两个维度(通常是宽度和高度)。a = torch.tensor(anchors).float().view(self.nl, -1, 2)# 使用 register_buffer 方法将调整形状后的锚点张量 a 注册为模型的一个缓冲区,命名为 'anchors' 。这意味着这些锚点数据会在模型的状态字典中保存,但不会被优化器更新。self.register_buffer('anchors', a) # shape(nl,na,2)# 克隆锚点张量 a ,以避免修改原始数据。然后,使用 .view(self.nl, 1, -1, 1, 1, 2) 调整克隆后的张量的形状,使其成为一个六维张量,这个张量将用于在模型的前向传播中将预测的边界框坐标从特征图空间转换到图像空间。# 最后,使用 register_buffer 方法将这个张量注册为模型的另一个缓冲区,命名为 'anchor_grid' 。self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)# 创建一个 nn.ModuleList ,包含一系列的 nn.Conv2d 卷积层,用于处理输入特征图 ch 。# 每个卷积层将输入通道数 x 转换为 self.no * self.na ,其中 self.no 是每个锚点的输出数量, self.na 是每个检测层的锚点数量。卷积核大小为 1x1,这意味着这些卷积层实际上是在执行线性变换。self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv# 创建一个 nn.ModuleList ,包含一系列的 ImplicitA 模块,用于处理输入特征图 ch 。 ImplicitA 与隐式表示的锚点有关。self.ia = nn.ModuleList(ImplicitA(x) for x in ch)# 创建另一个 nn.ModuleList ,包含一系列的 ImplicitM 模块,用于处理输入特征图 ch 。 ImplicitM 与隐式表示的边界框坐标有关。self.im = nn.ModuleList(ImplicitM(self.no * self.na) for _ in ch)# 1.x :代表输入的特征图。def forward(self, x):# 这行代码被注释掉了,如果取消注释,它将设置 self.x_bin_sigmoid 实例的 use_fw_regression 属性为 True 。这个属性可能控制是否在宽度的 bin 预测中使用前向回归。#self.x_bin_sigmoid.use_fw_regression = True# 类似地,这行代码被注释掉了,如果取消注释,它将设置 self.y_bin_sigmoid 实例的 use_fw_regression 属性为 True 。这个属性可能控制是否在高度的 bin 预测中使用前向回归。#self.y_bin_sigmoid.use_fw_regression = True# 设置 self.w_bin_sigmoid 实例的 use_fw_regression 属性为 True ,控制宽度的 bin 预测中使用前向回归。self.w_bin_sigmoid.use_fw_regression = True# 设置 self.h_bin_sigmoid 实例的 use_fw_regression 属性为 True ,控制高度的 bin 预测中使用前向回归。self.h_bin_sigmoid.use_fw_regression = True# 这行代码被注释掉了,如果取消注释,它将创建输入 x 的一个副本,这在性能分析时可能有用,因为它可以帮助避免在梯度计算中修改原始输入数据。# x = x.copy() # for profiling# 初始化一个空列表 z ,用于存储推理(inference)过程中的输出。z = [] # inference output# 代码使用了位运算符 |= ,它在这里的作用是将 self.training 和 self.export 的值进行逻辑或(OR)操作,并将结果赋值回 self.training 。# 如果 self.export 为 True ,则无论 self.training 的值如何, self.training 都会被设置为 True 。# 如果 self.export 为 False ,则 self.training 的值保持不变。# 这个操作的目的是确保在模型需要被导出为 ONNX 格式时,模型会被设置为训练模式。self.training |= self.export# 遍历所有的检测层, self.nl 是检测层的数量。for i in range(self.nl):# 对每个检测层的输入 x[i] 应用 ImplicitA 模块,然后应用卷积层 self.m[i] 。这里 self.ia[i] 是用于处理隐式表示的锚点的模块,而 self.m[i] 是输出卷积层。x[i] = self.m[i](self.ia[i](x[i])) # conv# 将 x[i] 的输出传递给 ImplicitM 模块,这是用于处理隐式表示的边界框坐标的模块。x[i] = self.im[i](x[i])# 获取当前检测层输出的张量 x[i] 的形状,并将其分解为 批量大小 bs 、 通道数 _ 、 高度 ny 和 宽度 nx 。# 注释中的 x(bs,255,20,20) to x(bs,3,20,20,85) 是一个示例,说明输入张量的形状从 (批量大小, 255, 20, 20) 转换为 (批量大小, 3, 20, 20, 85).# 其中 255 :是输入通道数, 3 :是锚点数量乘以每个锚点的输出数量(例如,每个锚点输出边界框坐标和类别概率), 85 :是类别数量加上边界框坐标的数量。bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)# .view(bs, self.na, self.no, ny, nx) :将 x[i] 的形状重新调整为 (batch_size, num_anchors, num_outputs_per_anchor, height, width) 。# .permute(0, 1, 3, 4, 2) :重新排序维度,将类别和边界框坐标放在一起,形成 (batch_size, num_anchors, height, width, num_outputs_per_anchor) 的形状。这样做是为了将空间维度(高度和宽度)放在连续的维度上,便于后续处理。# .contiguous() :确保张量在内存中是连续存储的,这对于某些 PyTorch 操作是必要的。x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()# 这个条件判断表示如果模型不在训练模式(即处于推理模式),则执行以下代码块。if not self.training: # inference# 检查第 i 个检测层的网格 self.grid[i] 的形状(具体是高度和宽度)是否与输入特征图 x[i] 的形状相匹配。if self.grid[i].shape[2:4] != x[i].shape[2:4]:# 如果网格的形状不匹配,调用 _make_grid 方法创建一个新的网格,并将其移动到与 x[i] 相同的设备(CPU或GPU)。self.grid[i] = self._make_grid(nx, ny).to(x[i].device)# 对第 i 个检测层的输出 x[i] 应用 sigmoid 激活函数,得到预测的边界框坐标和类别概率。y = x[i].sigmoid()# 将 sigmoid 激活后的边界框中心坐标(x, y)进行缩放和平移,计算出实际的边界框中心坐标。这里 2. - 0.5 是将 sigmoid 的输出范围从 (0, 1) 映射到 (-1, 1)。y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy#y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh#px = (self.x_bin_sigmoid.forward(y[..., 0:12]) + self.grid[i][..., 0]) * self.stride[i]#py = (self.y_bin_sigmoid.forward(y[..., 12:24]) + self.grid[i][..., 1]) * self.stride[i]# y[..., 2:24] :从 y 张量中提取宽度的预测值,这些值是经过 sigmoid 激活函数处理的。# self.w_bin_sigmoid.forward(y[..., 2:24]) :将提取的宽度预测值传递给 self.w_bin_sigmoid 实例的 forward 方法,该方法将预测值转换为实际的宽度值。# self.anchor_grid[i][..., 0] :从 self.anchor_grid 缓冲区中提取第 i 个检测层的锚点宽度。# pw :计算得到的预测宽度,通过将 self.w_bin_sigmoid 的输出乘以对应的锚点宽度得到。pw = self.w_bin_sigmoid.forward(y[..., 2:24]) * self.anchor_grid[i][..., 0]# y[..., 24:46] :从 y 张量中提取高度的预测值,这些值是经过 sigmoid 激活函数处理的。# self.h_bin_sigmoid.forward(y[..., 24:46]) :将提取的高度预测值传递给 self.h_bin_sigmoid 实例的 forward 方法,该方法将预测值转换为实际的高度值。# self.anchor_grid[i][..., 1] :从 self.anchor_grid 缓冲区中提取第 i 个检测层的锚点高度。# ph :计算得到的预测高度,通过将 self.h_bin_sigmoid 的输出乘以对应的锚点高度得到。ph = self.h_bin_sigmoid.forward(y[..., 24:46]) * self.anchor_grid[i][..., 1]#y[..., 0] = px#y[..., 1] = py# 更新 y 中的宽度预测值。y[..., 2] = pw# 更新 y 中的高度预测值。y[..., 3] = ph# 将 y 中的前4个维度(包含边界框的中心坐标、宽度和高度)与剩余的维度(可能包含其他信息,如类别概率)连接起来。y = torch.cat((y[..., 0:4], y[..., 46:]), dim=-1)# 将处理后的预测结果 y 重新排列形状,并添加到列表 z 中,以便后续的拼接操作。z.append(y.view(bs, -1, y.shape[-1]))# 如果模型处于训练模式,直接返回输入 x 。# 如果模型处于推理模式,将列表 z 中的所有预测结果拼接起来,并与原始输入 x 一起返回。 torch.cat(z, 1) 表示沿着第二个维度(即特征维度)进行拼接。return x if self.training else (torch.cat(z, 1), x)@staticmethoddef _make_grid(nx=20, ny=20):yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()6.class Model(nn.Module):
# 这段代码定义了一个名为 Model 的类,它是 PyTorch 的 nn.Module 的子类。这个类用于构建和初始化一个目标检测模型,根据配置文件或字典来定义模型结构,并进行相应的权重初始化和锚点调整。
# 定义了一个名为 Model 的类,它继承自 PyTorch 的 nn.Module 。
class Model(nn.Module):# 这是 Model 类的构造函数,它接受四个参数。# 1.cfg :模型配置文件的路径或一个包含模型配置的字典。# 2.ch :输入通道数,默认为3。# 3.nc :类别数量,如果提供,则覆盖配置文件中的值。# 4.anchors :锚点,如果提供,则覆盖配置文件中的值。def __init__(self, cfg='yolor-csp-c.yaml', ch=3, nc=None, anchors=None): # model, input channels, number of classes# 调用父类 nn.Module 的构造函数。super(Model, self).__init__()# 初始化一个标志变量 self.traced ,用于跟踪模型是否已被转换为 TorchScript。self.traced = False# 使用 isinstance 函数检查 cfg 参数是否是一个字典。if isinstance(cfg, dict):# 如果 cfg 是一个字典,那么直接将其赋值给实例变量 self.yaml ,这个变量将存储模型的配置信息。self.yaml = cfg # model dict# 如果 cfg 不是一个字典,那么假设它是一个 YAML 文件的路径。else: # is *.yaml# 导入 yaml 模块,用于加载 YAML 文件。注释表明这个导入是为了 torch hub 兼容性。import yaml # for torch hub# 使用 Path 函数(来自 pathlib 模块)获取 cfg 路径的文件名,并将其存储在 self.yaml_file 中。self.yaml_file = Path(cfg).name# 使用 with 语句打开 cfg 指定的 YAML 文件,确保文件在操作完成后正确关闭。with open(cfg) as f:# 使用 yaml.load 函数加载 YAML 文件的内容,并指定 Loader 为 yaml.SafeLoader 以确保加载过程的安全。加载后的内容(模型配置)被赋值给 self.yaml 。self.yaml = yaml.load(f, Loader=yaml.SafeLoader) # model dict# Define model 定义模型。# 这行代码做了几件事情 :# 使用 self.yaml.get('ch', ch) 从配置字典中获取输入通道数 ch ,如果配置中没有指定,则使用函数参数 ch 的值。# 将获取到的值赋给 self.yaml['ch'] ,这样配置字典中也会包含这个值。# 最后,将这个值赋给局部变量 ch ,以便后续使用。ch = self.yaml['ch'] = self.yaml.get('ch', ch) # input channels# 检查是否提供了新的类别数量 nc 并且它与配置中的值不同。if nc and nc != self.yaml['nc']:# 如果 nc 与配置中的值不同,则记录一条信息日志,表明正在覆盖配置文件中的类别数量。logger.info(f"Overriding model.yaml nc={self.yaml['nc']} with nc={nc}")# 将新的类别数量 nc 赋值给 self.yaml['nc'] ,从而覆盖配置文件中的值。self.yaml['nc'] = nc # override yaml value# 检查是否提供了新的锚点 anchors 。if anchors:# 如果提供了新的锚点,则记录一条信息日志,表明正在覆盖配置文件中的锚点。logger.info(f'Overriding model.yaml anchors with anchors={anchors}')# 将新的锚点 anchors 赋值给 self.yaml['anchors'] ,从而覆盖配置文件中的值。这里使用了 round 函数,可能是为了确保锚点值是整数。self.yaml['anchors'] = round(anchors) # override yaml value# 使用 parse_model 函数解析配置字典 self.yaml ,创建模型结构和保存列表。 deepcopy 确保传递给 parse_model 的配置字典是独立的副本,避免修改原始配置。# def parse_model(d, ch): -> 它用于解析模型配置字典 d 并从中提取必要的信息来构建模型。返回一个包含所有层的 nn.Sequential 容器 和 排序后的保存列表 save 。 -> return nn.Sequential(*layers), sorted(save)self.model, self.save = parse_model(deepcopy(self.yaml), ch=[ch]) # model, savelist# 创建一个类别名称列表,这里默认使用从 0 到 self.yaml['nc'] - 1 的字符串作为类别名称。self.names = [str(i) for i in range(self.yaml['nc'])] # default names# 这行代码被注释掉了,如果取消注释,它将打印模型前向传播一个假输入时每一层输出的形状。这可以用于验证模型结构是否正确。# print([x.shape for x in self.forward(torch.zeros(1, ch, 64, 64))])# Build strides, anchors# 获取模型的最后一层,即检测层,并将其赋值给变量 m 。m = self.model[-1] # Detect()# 检查变量 m 是否是 Detect 类的实例。if isinstance(m, Detect):# 设置一个变量 s 作为输入图像的大小,用于计算步长。这里选择了256作为基准大小,这是YOLO模型中常用的大小。# 在这个上下文中, s 是模型输入图像的大小,这里固定为256。这个值通常是模型设计时的一个超参数。s = 256 # 2x min stride# 通过前向传播一个大小为 (1, ch, s, s) 的零张量来计算每个检测层的步长。步长是输入图像大小与特征图大小的比值。这个计算结果被转换为一个 PyTorch 张量,并赋值给 m.stride 。# 这行代码将计算得到的步长列表转换为 PyTorch 张量,并赋值给检测层实例 m 的 stride 属性。# [s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))] :这是一个列表推导式,用于计算每个检测层的步长。# torch.zeros(1, ch, s, s) 创建一个形状为 (1, ch, s, s) 的零张量,其中 1 是批量大小, ch 是输入通道数, s 是输入图像的大小(在这里是256)。# self.forward(...) 是模型的前向传播函数,它接受上述零张量作为输入,并返回模型每一层的输出。# x.shape[-2] 获取每个输出张量的空间维度(高度或宽度),通常是特征图的大小。# s / x.shape[-2] 计算步长,即输入图像大小与特征图大小的比值。m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward# 将锚点尺寸除以对应的步长,以调整锚点尺寸。步长张量通过 view 方法调整形状以匹配锚点张量的形状。m.anchors /= m.stride.view(-1, 1, 1)# 调用 check_anchor_order 函数来检查并可能反转锚点顺序,以确保锚点顺序与步长顺序一致。# def check_anchor_order(m): -> 它用于检查 YOLO 检测模块中的锚点顺序是否与步长顺序一致,并在必要时进行纠正。这个函数的目的是确保锚点的顺序与步长的顺序相匹配。check_anchor_order(m)# 将检测层的步长赋值给模型的 stride 属性。self.stride = m.stride# 调用 _initialize_biases 方法来初始化检测层的偏置项。这个方法通常只执行一次,用于设置分类和对象置信度的偏置。# def _initialize_biases(self, cf=None): -> 它用于初始化检测模型(如 YOLO 或类似的目标检测模型)中最后一个层的偏置项。self._initialize_biases() # only run once# 这行代码被注释掉了,如果取消注释,它将打印检测层的步长值。# print('Strides: %s' % m.stride.tolist())if isinstance(m, IDetect):s = 256 # 2x min stridem.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forwardm.anchors /= m.stride.view(-1, 1, 1)check_anchor_order(m)self.stride = m.strideself._initialize_biases() # only run once# print('Strides: %s' % m.stride.tolist())# 这个条件语句检查变量 m 是否是 IAuxDetect 类的实例。if isinstance(m, IAuxDetect):# 设置变量 s 为256,这代表了一个基准步长值,用于计算模型的步长(stride)。s = 256 # 2x min stride# m.stride = torch.tensor(...) :这行代码将计算得到的步长列表转换为PyTorch张量,并赋值给检测层实例 m 的 stride 属性。# [s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))[:4]] :这是一个列表推导式,用于计算每个检测层的步长。# torch.zeros(1, ch, s, s) :创建一个形状为 (1, ch, s, s) 的零张量,其中 1 是批量大小, ch 是输入通道数, s 是输入图像的大小(在这里是256)。# self.forward(...) :是模型的前向传播函数,它接受上述零张量作为输入,并返回模型每一层的输出。# x.shape[-2] :获取每个输出张量的空间维度(高度或宽度),通常是特征图的大小。# s / x.shape[-2] :计算步长,即输入图像大小与特征图大小的比值。# [:4] :这个切片操作限制了前向传播的结果只取前4个输出,这可能是因为 IAuxDetect 层只需要前4个特征层的步长信息。m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))[:4]]) # forward#print(m.stride)# 将锚点(anchors)除以步长,以调整锚点的大小。 m.stride.view(-1, 1, 1) 将步长张量重塑为与锚点张量兼容的形状,以便进行元素-wise除法。m.anchors /= m.stride.view(-1, 1, 1)# 调用 check_anchor_order 函数来检查锚点的顺序是否正确,并在必要时进行调整。check_anchor_order(m)# 将计算得到的步长赋值给 self.stride ,以便在模型的其他部分使用。self.stride = m.stride# 调用 _initialize_aux_biases 方法来初始化辅助检测层的偏置项。这个方法只执行一次,用于设置辅助检测层的初始偏置。# def _initialize_aux_biases(self, cf=None): -> 它用于初始化目标检测模型中检测层的偏置项。self._initialize_aux_biases() # only run once# 这行代码被注释掉了,如果取消注释,它将打印出步长的值。# print('Strides: %s' % m.stride.tolist())if isinstance(m, IBin):s = 256 # 2x min stridem.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forwardm.anchors /= m.stride.view(-1, 1, 1)check_anchor_order(m)self.stride = m.stride# def _initialize_biases_bin(self, cf=None): -> 它用于初始化目标检测模型中检测层的偏置项,特别是在处理边界框的宽度和高度的 bin 化表示时。self._initialize_biases_bin() # only run once# print('Strides: %s' % m.stride.tolist())# Init weights, biases# def initialize_weights(model): -> 它用于初始化传入模型 model 的权重和偏置。这个函数遍历模型中的所有模块,并根据模块的类型应用特定的初始化策略。# initialize_weights(self) 这个函数通常用于初始化模型中的权重。在深度学习模型中,权重的初始化对模型的训练和最终性能有重要影响。initialize_weights(self)# 这个函数通常用于打印模型的详细信息,比如模型的结构、参数数量等。这有助于用户了解模型的复杂度和性能。self.info()# 这是一个日志记录函数,它在日志中添加一个空行。这样做可以使得日志信息更加清晰,便于区分不同的部分。logger.info('')# 这段代码是YOLOv7模型中的 forward 函数,它定义了模型在进行前向传播时的行为。这个函数支持两种模式:增强(augment)和非增强(非增强)。增强模式通常用于测试时提高模型的鲁棒性,而非增强模式用于正常的训练和单尺度推理。# x :通常是图像张量。# augment :用于控制是否进行增强。# profile :用于控制是否进行性能分析。def forward(self, x, augment=False, profile=False):# 如果启用增强模式,代码将执行以下步骤。if augment:# 获取输入图像的尺寸 img_size = x.shape[-2:] ,即高度和宽度。img_size = x.shape[-2:] # height, width# 定义缩放比例 s 。s = [1, 0.83, 0.67] # scales# 定义翻转操作 f 。f = [None, 3, None] # flips (2-ud, 3-lr)# 初始化一个空列表 y 用于存储每次增强操作后的输出。y = [] # outputs# 这行代码使用 zip 函数同时遍历尺度列表 s 和翻转列表 f 。 si 代表当前的尺度, fi 代表当前的翻转操作。for si, fi in zip(s, f):# x.flip(fi) :如果 fi 不为 None ,则对输入图像 x 进行翻转。 fi 的值决定了翻转的类型: 2 代表上下翻转(ud), 3 代表左右翻转(lr)。# scale_img :这是一个函数,用于将图像 xi 缩放到 si 指定的尺度。 gs 参数是最大步长,这里使用 self.stride.max() 的整数值。# def scale_img(img, ratio=1.0, same_shape=False, gs=32): -> 它用于对输入图像进行缩放,同时确保缩放后的图像尺寸是特定步长( gs )的倍数。 -> return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447)xi = scale_img(x.flip(fi) if fi else x, si, gs=int(self.stride.max()))# 对缩放和可能翻转后的图像 xi 进行一次前向传播, self.forward_once 是模型的一个方法,用于执行单次前向传播。这里只取返回结果的第一个元素,即检测结果。yi = self.forward_once(xi)[0] # forward# cv2.imwrite(f'img_{si}.jpg', 255 * xi[0].cpu().numpy().transpose((1, 2, 0))[:, :, ::-1]) # save# 将检测结果中的边界框坐标除以尺度 si ,以撤销之前的缩放操作。yi[..., :4] /= si # de-scaleif fi == 2:# 如果 fi 为 2 (上下翻转),则将检测结果中的y坐标(第二维)通过 yi[..., 1] = img_size[0] - yi[..., 1] 进行调整,以撤销翻转操作。yi[..., 1] = img_size[0] - yi[..., 1] # de-flip udelif fi == 3:# 如果 fi 为 3 (左右翻转),则将检测结果中的x坐标(第一维)通过 yi[..., 0] = img_size[1] - yi[..., 0] 进行调整,以撤销翻转操作。yi[..., 0] = img_size[1] - yi[..., 0] # de-flip lr# 将处理后的检测结果 yi 添加到列表 y 中。y.append(yi)# 在循环结束后,使用 torch.cat 将所有增强后的检测结果在第一个维度(通常是特征维度)上拼接起来,并返回这个拼接的结果 以及 None (可能用于某些内部状态或者额外信息,但在这种情况下没有使用)。return torch.cat(y, 1), None # augmented inference, trainelse:# 如果没有启用增强模式,代码将执行 self.forward_once(x, profile) ,这是一个单尺度的前向传播,可能还会根据 profile 参数进行性能分析。return self.forward_once(x, profile) # single-scale inference, train# 这段代码是YOLOv7模型中的 forward_once 函数的一部分,它负责模型的单次前向传播。这个函数遍历模型中的每个模块( m ),并根据模块的配置处理数据流。# 1.x :输入数据,通常是图像张量。# 2.profile :布尔值,指示是否对前向传播进行性能分析。def forward_once(self, x, profile=False):# 初始化两个空列表, y 用于存储每层的输出, dt 用于存储时间分析数据(如果 profile 为 True )。y, dt = [], [] # outputs# 遍历模型中的每个模块 m 。for m in self.model:# 检查模块 m 是否有指定的输入来源。# 如果 m.f 不是 -1 ,表示该模块的输入不是来自前一层,而是来自模型中的其他层。if m.f != -1: # if not from previous layer# x = y[m.f] :如果 m.f 是一个整数,表示输入来自 y 列表中索引为 m.f 的层的输出。# x = [x if j == -1 else y[j] for j in m.f] :如果 m.f 是一个列表,表示输入来自多个层的输出,根据 m.f 中的索引从 y 列表中获取相应的输出,并与当前的 x (如果索引为 -1 )组合。x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers# 检查 self 对象是否有 traced 属性。if not hasattr(self, 'traced'):# 如果没有 traced 属性,则设置其为 False 。self.traced=False# 如果 self.traced 为 True 。if self.traced:# 检查当前模块 m 是否是检测模块( Detect )、改进的检测模块( IDetect )或辅助检测模块( IAuxDetect )。if isinstance(m, Detect) or isinstance(m, IDetect) or isinstance(m, IAuxDetect):# 如果是这些模块之一,则终止循环。这可能是因为这些模块是模型的最后几层,不需要进一步的前向传播。break# 用于性能分析,特别是计算模型中每个模块的浮点运算次数(FLOPS)和执行时间。# 如果启用性能分析( profile 为 True ),则执行以下操作。if profile:# 检查当前模块 m 是否是检测模块( Detect )、改进的检测模块( IDetect )、辅助检测模块( IAuxDetect )或二进制模块( IBin )。c = isinstance(m, (Detect, IDetect, IAuxDetect, IBin))# 使用 thop 库(如果可用)计算模块 m 的浮点运算次数(FLOPS)。# thop.profile(m, inputs=(x.copy() if c else x,), verbose=False) :对模块 m 进行性能分析, inputs 参数传递输入数据 x (如果是检测模块,则传递 x 的副本以避免修改原始数据)。# [0] :获取性能分析结果的第一个元素,即FLOPS。# / 1E9 * 2 :将FLOPS从浮点运算次数转换为十亿次(GFLOPS)并乘以2(可能是为了考虑某些特定的性能因素)。# f thop else 0 :如果 thop 库不可用,则将FLOPS设置为0。o = thop.profile(m, inputs=(x.copy() if c else x,), verbose=False)[0] / 1E9 * 2 if thop else 0 # FLOPSfor _ in range(10):# 对模块 m 进行10次前向传播,以预热缓存并减少测量误差。m(x.copy() if c else x)# 记录当前时间,用于后续计算执行时间。# def time_synchronized(): -> 它用于获取一个与CUDA时间同步的准确时间戳。 -> return time.time()t = time_synchronized()for _ in range(10):# 再次对模块 m 进行10次前向传播,用于测量执行时间。m(x.copy() if c else x)# 计算10次前向传播的总时间,并将其转换为毫秒(ms),然后添加到 dt 列表中。dt.append((time_synchronized() - t) * 100)# 打印性能分析结果,包括 :# o :模块的FLOPS。# m.np :模块的参数数量。# dt[-1] :模块的平均执行时间(毫秒)。# m.type :模块的类型。print('%10.1f%10.0f%10.1fms %-40s' % (o, m.np, dt[-1], m.type))# 这行代码表示对当前模块 m 进行前向传播。 m 是一个模型层或模块, x 是传递给这个模块的输入数据。执行 m(x) 后, x 将被更新为模块 m 的输出结果。x = m(x) # run# 这行代码用于决定是否保存当前模块 m 的输出。# m.i :这是模块 m 的索引或标识符,用于确定它在模型中的位置。# self.save :这是一个列表,包含了需要保存输出的模块的索引。# if m.i in self.save :这个条件判断当前模块 m 的索引是否在 self.save 列表中。# x if m.i in self.save else None :这是一个条件表达式,如果 m.i 在 self.save 中,则 y 列表中添加当前模块的输出 x ;如果不在,则添加 None 。# y.append(...) :这将条件表达式的结果添加到 y 列表中。 y 列表用于存储模型中特定层的输出,这些输出可能在后续的处理中需要用到,例如在特征金字塔网络(FPN)结构中合并来自不同层级的特征。y.append(x if m.i in self.save else None) # save output# 如果启用性能分析( profile 为 True ),则执行以下操作。if profile:# 打印所有模块的总执行时间。# dt :这是一个列表,包含了每个模块的执行时间(以毫秒为单位)。# sum(dt) :计算 dt 列表中所有元素的总和,即所有模块的总执行时间。# '%.1fms total' :这是一个格式化字符串,用于将总时间格式化为保留一位小数的浮点数,并附加 ms (毫秒)后缀。# print(...) :将格式化后的总执行时间打印到控制台。print('%.1fms total' % sum(dt))# 返回模型的最终输出结果。 x :这是模型经过所有层处理后的最终输出数据。return x# 这段代码定义了一个名为 _initialize_biases 的方法,它用于初始化检测模型(如 YOLO 或类似的目标检测模型)中最后一个层的偏置项。这个方法特别关注于处理类别不平衡问题,通过为每个锚点设置合适的偏置值来提高模型训练的稳定性和效果。# 定义了一个名为 _initialize_biases 的方法,它接受两个参数。# 1.self :类的实例。# 2.cf :可选参数,表示类别频率。def _initialize_biases(self, cf=None): # initialize biases into Detect(), cf is class frequency 将偏差初始化到 Detect() 中,cf 是类频率。# https://arxiv.org/abs/1708.02002 section 3.3# cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.# 获取模型的最后一层,即检测层,并将其赋值给变量 m 。m = self.model[-1] # Detect() module# 遍历检测层中的每个卷积模块 mi 和对应的步长 s 。for mi, s in zip(m.m, m.stride): # from# 将每个卷积模块的偏置项 b 重新形状,以匹配锚点的数量和每个锚点的输出维度。b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)# 对于每个锚点,更新偏置项的第 4 个维度(通常对应于对象存在的概率),使用对数函数调整偏置值。这里的计算基于假设每 640x640 图像中有大约 8 个对象。b.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)# 对于每个锚点,更新偏置项的第 5 个维度及之后的维度(通常对应于类别概率),使用对数函数调整偏置值。如果 cf (类别频率)为 None ,则使用一个默认值;否则,使用 cf 计算每个类别的偏置值。b.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls# 将更新后的偏置项 b 重新形状,并设置为卷积模块的偏置项,使其成为一个可学习的参数。mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)# 这个方法的目的是在使用目标检测模型时,通过初始化偏置项来减少类别不平衡的影响,特别是在训练数据中正样本(对象)和负样本(背景)数量差异很大的情况下。通过这种方式,模型可以更快地收敛,并且能够更准确地检测目标。# 这段代码定义了一个名为 _initialize_aux_biases 的方法,它用于初始化目标检测模型中检测层的偏置项。这个方法特别关注于处理类别不平衡问题,通过为每个锚点设置合适的偏置值来提高模型训练的稳定性和效果。# 定义了一个名为 _initialize_aux_biases 的方法,它接受两个参数。# 1.self :类的实例。# 2.cf :可选参数,表示类别频率。def _initialize_aux_biases(self, cf=None): # initialize biases into Detect(), cf is class frequency 将偏差初始化到 Detect() 中,cf 是类频率。# https://arxiv.org/abs/1708.02002 section 3.3# cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.# 获取模型的最后一层,即检测层,并将其赋值给变量 m 。m = self.model[-1] # Detect() module# 遍历检测层中的每个卷积模块 mi 和 mi2 (可能是用于不同尺度的特征图),以及对应的步长 s 。for mi, mi2, s in zip(m.m, m.m2, m.stride): # from# 将卷积模块 mi 的偏置项 b 重新形状,以匹配锚点的数量和每个锚点的输出维度。b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)# 更新偏置项的第 4 个维度(通常对应于对象存在的概率),使用对数函数调整偏置值。这里的计算基于假设每 640x640 图像中有大约 8 个对象。b.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)# 更新偏置项的第 5 个维度及之后的维度(通常对应于类别概率),使用对数函数调整偏置值。如果 cf (类别频率)为 None ,则使用一个默认值;否则,使用 cf 计算每个类别的偏置值。b.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls# 将更新后的偏置项 b 重新形状,并设置为卷积模块 mi 的偏置项,使其成为一个可学习的参数。mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)# 将卷积模块 mi2 的偏置项 b2 重新形状,以匹配锚点的数量和每个锚点的输出维度。b2 = mi2.bias.view(m.na, -1) # conv.bias(255) to (3,85)# 同样更新 mi2 的偏置项的第 4 个维度。b2.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)# 同样更新 mi2 的偏置项的第 5 个维度及之后的维度。b2.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls# 将更新后的偏置项 b2 重新形状,并设置为卷积模块 mi2 的偏置项,使其成为一个可学习的参数。mi2.bias = torch.nn.Parameter(b2.view(-1), requires_grad=True)# 这个方法的目的是在使用目标检测模型时,通过初始化偏置项来减少类别不平衡的影响,特别是在训练数据中正样本(对象)和负样本(背景)数量差异很大的情况下。# 通过这种方式,模型可以更快地收敛,并且能够更准确地检测目标。这个方法与 _initialize_biases 类似,但适用于具有两个检测头的模型,可能用于处理不同尺度的特征图。# 这段代码定义了一个名为 _initialize_biases_bin 的方法,它用于初始化目标检测模型中检测层的偏置项,特别是在处理边界框的宽度和高度的 bin 化表示时。这个方法特别关注于处理类别不平衡问题,通过为每个锚点设置合适的偏置值来提高模型训练的稳定性和效果。# 定义了一个名为 _initialize_biases_bin 的方法,它接受两个参数。# 1.self :类的实例。# 2.cf :可选参数,表示类别频率。def _initialize_biases_bin(self, cf=None): # initialize biases into Detect(), cf is class frequency 将偏差初始化到 Detect() 中,cf 是类频率。# https://arxiv.org/abs/1708.02002 section 3.3# cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.# 获取模型的最后一层,即检测层,并将其赋值给变量 m 。这里假设最后一层是处理 bin 化的层。m = self.model[-1] # Bin() module# 获取 bin 的数量,从模块 m 中获取 bin_count 属性。bc = m.bin_count# 遍历检测层中的每个卷积模块 mi 和对应的步长 s 。for mi, s in zip(m.m, m.stride): # from# 将卷积模块 mi 的偏置项 b 重新形状,以匹配锚点的数量和每个锚点的输出维度。b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)# 保存原始偏置值,特别是对于边界框的中心坐标(x, y)和对象存在的概率。# b 是从卷积模块 mi 中获取的偏置项,已经被重新形状为 (m.na, -1) ,其中 m.na 是每个检测层的锚点数量。# [:, (0,1,2,bc+3)] 是一个索引操作,它从 b 中选择所有行( : 表示选择所有行)和特定列,这些列由元组 (0,1,2,bc+3) 指定。# 0, 1, 2 分别对应于边界框的中心坐标 x、y 和对象存在的概率。 bc+3 对应于类别概率之前的最后一个索引,因为类别概率紧随对象存在概率之后。# .data :.data 属性用于访问张量中存储的原始数据,而不跟踪梯度计算。这在初始化偏置项时很有用,因为我们希望在不影响自动微分的情况下访问和修改数据。old = b[:, (0,1,2,bc+3)].data# 计算对象存在概率的索引。obj_idx = 2*bc+4# 更新偏置项,特别是对于对象存在的概率。# 0.6 / (bc + 1 - 0.99) :计算一个缩放因子,其中 bc 是 bin 的数量。这个缩放因子用于调整对象存在概率的偏置项。# 具体来说, 0.6 / (bc + 1 - 0.99) 这个表达式计算了一个缩放因子,它基于 bin 的数量 bc 来调整对象存在概率的偏置项。# 这个缩放因子被加到对应于对象存在概率的偏置项上,从而影响了模型对对象存在概率的初始预测。通过这种方式,模型可以更好地平衡正样本和负样本,减少由于类别不平衡导致的训练问题。b[:, :obj_idx].data += math.log(0.6 / (bc + 1 - 0.99))# 更新偏置项,特别是对于对象存在的概率,使用对数函数调整偏置值。这里的计算基于假设每 640x640 图像中有大约 8 个对象。b[:, obj_idx].data += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)# 更新偏置项,特别是对于类别概率,使用对数函数调整偏置值。如果 cf (类别频率)为 None ,则使用一个默认值;否则,使用 cf 计算每个类别的偏置值。b[:, (obj_idx+1):].data += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls# 恢复原始偏置值,特别是对于边界框的中心坐标(x, y)和对象存在的概率。b[:, (0,1,2,bc+3)].data = old# 将更新后的偏置项 b 重新形状,并设置为卷积模块 mi 的偏置项,使其成为一个可学习的参数。mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)# 这个方法的目的是在使用目标检测模型时,通过初始化偏置项来减少类别不平衡的影响,特别是在训练数据中正样本(对象)和负样本(背景)数量差异很大的情况下。# 通过这种方式,模型可以更快地收敛,并且能够更准确地检测目标。这个方法与 _initialize_biases 类似,但适用于处理边界框尺寸的 bin 化表示。# 这段代码定义了一个名为 _print_biases 的函数,它用于打印模型最后一个模块( Detect 模块)中所有卷积层的偏置值。# 它不接受任何参数,只能作为类的一个方法被调用。def _print_biases(self):# 获取模型中的最后一个模块,这里假设它是 Detect 模块。m = self.model[-1] # Detect() module# 遍历 Detect 模块中的所有子模块 mi 。这些子模块通常是卷积层。for mi in m.m: # from# 获取每个卷积层的偏置值,并对其进行变换。# mi.bias :获取卷积层的偏置值。# .detach() :从当前计算图中分离出偏置值,这样就不会在梯度计算中跟踪它们。# .view(m.na, -1) :将偏置值重塑为两个维度,其中 m.na 是锚框的数量, -1 表示自动计算另一个维度的大小。# .T :转置重塑后的偏置值,使其变为 (3, 85) 的形状,这里假设有3个锚框和85个输出通道。b = mi.bias.detach().view(m.na, -1).T # conv.bias(255) to (3,85)# 打印偏置值的统计信息。# '%6g Conv2d.bias:' + '%10.3g' * 6 :格式化字符串,用于打印偏置值的统计信息,其中 %6g 用于打印卷积层的输出通道数, '%10.3g' * 6 用于打印6个浮点数,每个数占10个字符宽,保留3位小数。# mi.weight.shape[1] :获取卷积层的输出通道数。# *b[:5].mean(1).tolist() :计算前5个偏置值的平均值,并将其转换为列表。# b[5:].mean() :计算剩余偏置值的平均值。# print(...) :将格式化后的字符串打印到控制台。print(('%6g Conv2d.bias:' + '%10.3g' * 6) % (mi.weight.shape[1], *b[:5].mean(1).tolist(), b[5:].mean()))# 这段代码的目的是在训练过程中或者模型分析时,提供模型最后一个卷积层偏置值的统计信息,这有助于理解模型的激活和预测行为。通过查看偏置值的平均值,可以对模型的初始化和学习到的特征有一个直观的了解。# def _print_weights(self):# for m in self.model.modules():# if type(m) is Bottleneck:# print('%10.3g' % (m.w.detach().sigmoid() * 2)) # shortcut weights# 这段代码定义了一个名为 fuse 的函数,它用于融合模型中的卷积层( Conv2d )和批量归一化层( BatchNorm2d )。这种融合可以减少模型中的层数,提高推理速度,同时保持模型的准确性。# 它不接受任何参数,只能作为类的一个方法被调用。def fuse(self): # fuse model Conv2d() + BatchNorm2d() layers# 打印一条消息,表示开始融合层。print('Fusing layers... ')# 遍历模型中的所有模块。for m in self.model.modules():# 检查当前模块 m 是否是 RepConv 类型。if isinstance(m, RepConv):#print(f" fuse_repvgg_block")# 如果是,则调用该模块的 fuse_repvgg_block 方法进行融合。# def fuse_repvgg_block(self): -> RepConv 类中的 fuse_repvgg_block 方法,该方法用于将 RepConv 模块中的所有分支(包括3x3卷积、1x1卷积和可能的身份连接)融合为一个单一的卷积结构,以便在部署模式下使用。m.fuse_repvgg_block()# 检查当前模块 m 是否是 RepConv_OREPA 类型。elif isinstance(m, RepConv_OREPA):#print(f" switch_to_deploy")# 如果是,则调用该模块的 switch_to_deploy 方法进行融合。# def switch_to_deploy(self): -> RepConv_OREPA 类的 switch_to_deploy 方法,它用于将模型从训练模式转换到部署模式。在部署模式下,模型会将多个卷积和批量归一化层融合为一个单一的卷积层,以提高推理效率。m.switch_to_deploy()# 检查当前模块 m 是否是 Conv 类型,并且是否有 bn 属性(即批量归一化层)。elif type(m) is Conv and hasattr(m, 'bn'):# 如果是,则使用 fuse_conv_and_bn 函数融合卷积层和批量归一化层,并更新卷积层的权重。# def fuse_conv_and_bn(conv, bn):# -> 其目的是将卷积层( Conv2d )和批量归一化层( BatchNorm2d )融合为一个单一的卷积层。返回融合后的卷积层,该层包含了原始卷积层和批量归一化层的效果。# -> return fusedconvm.conv = fuse_conv_and_bn(m.conv, m.bn) # update conv# 删除批量归一化层的属性,因为它已经被融合到卷积层中。delattr(m, 'bn') # remove batchnorm# def fuseforward(self, x): -> 融合前向传播,直接应用卷积和激活函数,跳过批量归一化。这在某些情况下用于模型剪枝或加速推理。 -> return self.act(self.conv(x))# 更新模块的 forward 方法,以使用融合后的层进行前向传播。m.forward = m.fuseforward # update forward# 调用模型的 info 方法,可能用于打印模型的信息,包括融合后的层数和参数数量。self.info()# 返回模型本身,允许链式调用。return self# 整体来说, fuse 函数的目的是优化模型的结构,通过融合卷积层和批量归一化层来减少模型的复杂度,提高推理效率。这对于部署到资源受限的环境(如移动设备或嵌入式系统)中的模型特别有用。# 这段代码定义了一个名为 nms 的函数,它用于在模型中添加或移除非极大值抑制(Non-Maximum Suppression, NMS)模块。NMS 是目标检测任务中常用的一种技术,用于去除重叠的检测框,只保留最佳的检测结果。# 它接受一个参数 1.mode ,用于指示是添加( True )还是移除( False )NMS模块。def nms(self, mode=True): # add or remove NMS module 添加或删除 NMS 模块。# 检查模型的最后一个模块是否是NMS模块。present = type(self.model[-1]) is NMS # last layer is NMS 最后一层是 NMS。# 如果 mode 为 True 且当前模型中没有NMS模块,则执行以下操作。if mode and not present:# 打印消息,表示正在添加NMS模块。print('Adding NMS... ')# 创建一个新的NMS模块实例。# class NMS(nn.Module): -> 用于实现非最大抑制(Non-Maximum Suppression, NMS)操作。 -> def __init__(self): ->def forward(self, x): -> return non_max_suppression(x[0], conf_thres=self.conf, iou_thres=self.iou, classes=self.classes)m = NMS() # module# 设置NMS模块的 f 属性为 -1 ,这通常表示NMS模块的输入来自前一层。m.f = -1 # from# 设置NMS模块的索引 i ,使其紧跟在模型最后一个模块的索引之后。m.i = self.model[-1].i + 1 # index# add_module(name, module)# 在PyTorch中, add_module 是一个方法,它属于 nn.Module 类。这个方法用于在模块( nn.Module 的实例)中动态添加子模块。# 参数 :# name :要添加的模块的名称,这个名称在模块中必须是唯一的。# module :要添加的子模块,它必须是一个 nn.Module 的实例。# add_module 方法使得在运行时动态修改模型结构成为可能,这在某些特定的应用场景中非常有用,比如在模型训练过程中根据需要添加或移除特定的层。# 将NMS模块添加到模型中。self.model.add_module(name='%s' % m.i, module=m) # add# 将模型设置为评估模式,这通常在添加或修改模型结构后进行,以确保模型在正确的状态下进行推理。self.eval()# 如果 mode 为 False 且模型中存在NMS模块,则执行以下操作elif not mode and present:# 打印消息,表示正在移除NMS模块。print('Removing NMS... ')# 从模型中移除最后一个模块,即NMS模块。self.model = self.model[:-1] # remove# 返回模型本身,允许链式调用。return self# 这个函数提供了一种灵活的方式来控制模型是否包含NMS模块,这在不同的应用场景中可能很有用。例如,在训练过程中可能不需要NMS,而在推理时需要添加NMS以提高检测的准确性。通过这个函数,可以在不修改模型其他部分的情况下,方便地添加或移除NMS模块。# 这段代码定义了一个名为 autoshape 的函数,它用于在模型中添加一个名为 autoShape 的模块。 autoShape 模块可能是用来调整模型输入形状的,以确保模型可以接收不同尺寸的输入。# 定义了一个名为 autoshape 的函数,它不接受任何参数,只能作为类的一个方法被调用。def autoshape(self): # add autoShape module# 打印一条消息,表示正在添加 autoShape 模块。print('Adding autoShape... ')# 创建一个 autoShape 模块的实例,并将其应用于当前模型 self 。# class autoShape(nn.Module):# -> autoShape 的类,它是一个用于目标检测模型的包装器(wrapper),旨在使模型能够接受不同格式的输入(如OpenCV、NumPy、PIL图像或PyTorch张量),并包括预处理、推理和非极大值抑制(NMS)。 -> def __init__(self, model):m = autoShape(self) # wrap model# 复制当前模型 self 的特定属性到新创建的 autoShape 模块 m 。# include :一个元组,指定了要复制的属性名称。# exclude :一个空元组,表示没有属性需要被排除。# def copy_attr(a, b, include=(), exclude=()): -> 它用于从一个对象 b 复制属性到另一个对象 a 。这个函数允许你指定只复制特定的属性( include ),以及排除某些属性( exclude )。copy_attr(m, self, include=('yaml', 'nc', 'hyp', 'names', 'stride'), exclude=()) # copy attributes# 返回包装后的模型 m 。return m# 这段代码定义了一个名为 info 的函数,它是模型类的一个方法,用于打印模型的相关信息。这个函数调用了另一个名为 model_info 的函数,并传递了模型的详细信息、是否详细打印以及图像尺寸作为参数。# self :指向类实例的引用,允许访问类的属性和方法。# 1.verbose :一个布尔值,指示是否打印详细的模型信息,默认为 False 。# 2.img_size :一个整数,指定图像的尺寸,默认为 640 。这个参数可能用于计算模型的性能指标,如参数数量和计算量(FLOPS)等。def info(self, verbose=False, img_size=640): # print model information# 调用 model_info 函数,传递 self 、 verbose 和 img_size 作为参数。model_info(self, verbose, img_size)7.def parse_model(d, ch):
# 这段代码定义了一个名为 parse_model 的函数,它用于解析模型配置字典 d 并从中提取必要的信息来构建模型。这个函数是模型构建过程的一部分,通常用于从配置文件中读取模型架构的详细信息。
# 定义了一个名为 parse_model 的函数,它接受两个参数.
# 1.d :模型配置字典.
# 2.ch :输入通道数。
def parse_model(d, ch): # model_dict, input_channels(3)# 使用 logger 记录一个格式化的字符串,作为日志输出的标题行。这个标题行包含了模型构建过程中每行日志的列标题,例如模块名称和参数等。# logger.info() :这是 Python 的 logging 模块中的一个方法,用于记录信息级别的日志。# \n 表示换行符,确保标题行在新的一行开始。# %3s 、 %18s 、 %3s 、 %10s 、 %-40s 和 %-30s 是格式化占位符,分别表示字符串字段, s 表示字符串类型,数字表示字段的最小宽度。# %3s :最小宽度为3的字符串。# %18s :最小宽度为18的字符串。# %3s :最小宽度为3的字符串。# %10s :最小宽度为10的字符串。# %-40s :最小宽度为40的字符串, - 表示左对齐。# %-30s :最小宽度为30的字符串, - 表示左对齐。# ('', 'from', 'n', 'params', 'module', 'arguments') 这是传递给格式化字符串的参数元组,分别对应上述格式化占位符的内容。# 第一个空字符串 '' 对应 %3s 。# 'from' 对应 %18s ,表示模块的来源。# 'n' 对应 %3s ,表示编号。# 'params' 对应 %10s ,表示参数数量。# 'module' 对应 %-40s ,表示模块名称。# 'arguments' 对应 %-30s ,表示模块参数。logger.info('\n%3s%18s%3s%10s %-40s%-30s' % ('', 'from', 'n', 'params', 'module', 'arguments'))# 从配置字典 d 中提取锚点 anchors 、类别数量 nc 、深度倍数 gd 和宽度倍数 gw 。anchors, nc, gd, gw = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple']# 计算锚点数量 na 。如果 anchors 是一个列表,则假设列表中的每个元素包含两个值(宽度和高度),因此锚点数量是列表长度的一半。如果 anchors 不是列表,则直接使用 anchors 的值。na = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # number of anchors# 计算每个检测层的输出数量 no 。这个值是锚点数量 na 乘以类别数量 nc 加上 5(通常包括4个边界框坐标和1个对象置信度)。no = na * (nc + 5) # number of outputs = anchors * (classes + 5)# 初始化三个变量: layers (用于存储模型层的列表), save (用于存储需要保存的层的列表), c2 (用于存储当前输出通道数,初始值设置为输入通道数 ch 的最后一个值)。layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out# 遍历由 backbone 和 head 组成的列表,这两个部分共同定义了模型的结构。 enumerate 函数用于获取每个元素的索引 i 和值 (f, n, m, args)。# f :模块的来源(from)。# n :模块的数量(number)。# m :模块的类型(module)。# args :模块的参数(arguments)。for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args# eval(expression, globals=None, locals=None)# eval 是 Python 中的一个内置函数,它用于将字符串作为 Python 表达式动态地计算并返回结果。使用 eval 时需要小心,因为它会执行字符串中的代码,这可能导致安全问题,特别是如果执行的代码来自不可信的源。# expression :一个字符串,包含要评估的 Python 表达式。# globals :一个字典,用于定义表达式评估时使用的全局变量。如果为 None ,则使用当前环境的全局变量。# locals :一个字典,用于定义表达式评估时使用的局部变量。如果为 None ,则使用当前环境的局部变量。# 安全性考虑 :# 由于 eval 可以执行任意代码,因此只应该在完全信任代码来源的情况下使用。在处理用户输入或其他不可预测的数据时,使用 eval 可能会导致代码注入攻击。# 替代方案 :# 如果只需要计算数学表达式,可以使用 ast.literal_eval ,它只能评估字面量表达式,因此更安全。# ast.literal_eval 只能处理简单的数据结构,如数字、字符串、元组、列表、字典、布尔值和 None 。如果尝试评估更复杂的表达式,它会抛出 ValueError 或 SyntaxError 。# 如果 m 是一个字符串,使用 eval 函数将其转换为对应的 Python 对象。这通常用于将配置文件中的字符串表示转换为实际的模块类。m = eval(m) if isinstance(m, str) else m # eval strings# 遍历 args 列表, enumerate 函数用于获取每个参数的索引 j 和值 a 。for j, a in enumerate(args):# 开始一个 try 块,用于捕获并处理可能发生的异常。try:# 如果参数 a 是一个字符串,尝试使用 eval 函数将其转换为对应的 Python 对象。如果不是字符串,则保持原值不变。args[j] = eval(a) if isinstance(a, str) else a # eval stringsexcept:# 如果在执行 eval 时发生异常(例如,如果字符串不是一个有效的 Python 表达式),则 except 块会捕获异常,但不执行任何操作(即忽略异常)。pass# 这行代码计算层的深度增益。如果 n (层的数量)大于1,则将其乘以深度倍数 gd 并四舍五入到最接近的整数,同时确保结果至少为1。n = max(round(n * gd), 1) if n > 1 else n # depth gain# 这个条件语句检查模块类型 m 是否属于一系列卷积类模块和相关模块的列表。if m in [nn.Conv2d, Conv, RobustConv, RobustConv2, DWConv, GhostConv, RepConv, RepConv_OREPA, DownC, SPP, SPPF, SPPCSPC, GhostSPPCSPC, MixConv2d, Focus, Stem, GhostStem, CrossConv, Bottleneck, BottleneckCSPA, BottleneckCSPB, BottleneckCSPC, RepBottleneck, RepBottleneckCSPA, RepBottleneckCSPB, RepBottleneckCSPC, Res, ResCSPA, ResCSPB, ResCSPC, RepRes, RepResCSPA, RepResCSPB, RepResCSPC, ResX, ResXCSPA, ResXCSPB, ResXCSPC, RepResX, RepResXCSPA, RepResXCSPB, RepResXCSPC, Ghost, GhostCSPA, GhostCSPB, GhostCSPC,SwinTransformerBlock, STCSPA, STCSPB, STCSPC,SwinTransformer2Block, ST2CSPA, ST2CSPB, ST2CSPC]:# c1 是当前层的输入通道数,从 ch 列表中获取, f 是输入索引。# c2 是当前层的输出通道数,从 args 列表中获取。c1, c2 = ch[f], args[0]if c2 != no: # if not output# 如果输出通道数 c2 不等于模型输出通道数 no ,则执行以下操作 :# c2 = make_divisible(c2 * gw, 8) :调整 c2 使其可被8整除,这是通过 make_divisible 函数实现的,其中 gw 是宽度倍数。这通常用于保持模型的一致性和效率。c2 = make_divisible(c2 * gw, 8)# 重新构建 args 列表,包含调整后的输入和输出通道数,以及其他参数。args = [c1, c2, *args[1:]]# 这个条件语句检查模块类型 m 是否属于一系列需要插入重复次数 n 的模块列表。if m in [DownC, SPPCSPC, GhostSPPCSPC, BottleneckCSPA, BottleneckCSPB, BottleneckCSPC, RepBottleneckCSPA, RepBottleneckCSPB, RepBottleneckCSPC, ResCSPA, ResCSPB, ResCSPC, RepResCSPA, RepResCSPB, RepResCSPC, ResXCSPA, ResXCSPB, ResXCSPC, RepResXCSPA, RepResXCSPB, RepResXCSPC,GhostCSPA, GhostCSPB, GhostCSPC,STCSPA, STCSPB, STCSPC,ST2CSPA, ST2CSPB, ST2CSPC]:# 如果模块类型 m 属于上述列表,则在 args 列表的第二个位置插入重复次数 n 。args.insert(2, n) # number of repeats# 将重复次数 n 设置为1,这通常意味着之后的层不再重复。n = 1elif m is nn.BatchNorm2d:# 如果模块类型 m 是批量归一化层( nn.BatchNorm2d ),则设置 args 为输入通道数 ch[f] 。args = [ch[f]]elif m is Concat:# 如果模块类型 m 是连接层( Concat ),则计算 c2 为所有输入层的通道数之和。 f 是一个包含输入层索引的列表。c2 = sum([ch[x] for x in f])elif m is Chuncat:# 如果模块类型 m 是通道连接层( Chuncat ),同样计算 c2 为所有输入层的通道数之和。c2 = sum([ch[x] for x in f])elif m is Shortcut:# 如果模块类型 m 是快捷连接层( Shortcut ),则设置 c2 为第一个输入层的通道数 ch[f[0]] 。c2 = ch[f[0]]elif m is Foldcut:# 如果模块类型 m 是折叠切割层( Foldcut ),则设置 c2 为输入通道数的一半 ch[f] // 2 。c2 = ch[f] // 2# 如果模块类型 m 是检测相关的层( Detect 、 IDetect 、 IAuxDetect 、 IBin ),则将输入通道数列表添加到 args ,并调整锚点数量。elif m in [Detect, IDetect, IAuxDetect, IBin]:# 将每个输入层的通道数添加到 args 。args.append([ch[x] for x in f])# 如果 args 中的第二个元素是整数(即锚点数量)。if isinstance(args[1], int): # number of anchors 锚框数量。# 则将其转换为范围列表,并复制 len(f) 次args[1] = [list(range(args[1] * 2))] * len(f)elif m is ReOrg:# 如果模块类型 m 是重组层( ReOrg ),则设置 c2 为输入通道数的四倍 ch[f] * 4 。c2 = ch[f] * 4elif m is Contract:# 如果模块类型 m 是收缩层( Contract ),则设置 c2 为输入通道数乘以参数 args[0] 的平方 ch[f] * args[0] ** 2 。c2 = ch[f] * args[0] ** 2elif m is Expand:# 如果模块类型 m 是扩展层( Expand ),则设置 c2 为输入通道数除以参数 args[0] 的平方 ch[f] // args[0] ** 2 。c2 = ch[f] // args[0] ** 2else:# 如果模块类型 m 不匹配上述任何一种,则设置 c2 为输入通道数 ch[f] 。c2 = ch[f]# 这行代码创建了一个模块实例 m_ 。如果 n (重复次数)大于1,则创建一个包含 n 个 m 类型模块的 nn.Sequential 容器。如果 n 不大于1,则只创建一个 m 类型模块实例。m_ = nn.Sequential(*[m(*args) for _ in range(n)]) if n > 1 else m(*args) # module# 获取模块 m 的类型名称,并将其转换为字符串。这里通过截取和替换来清理字符串,移除不必要的部分,如模块的完整路径和 __main__. 前缀。t = str(m)[8:-2].replace('__main__.', '') # module type# model.parameters()# 在PyTorch中, .parameters() 是 torch.nn.Module 类的一个实例方法,用于返回模型中所有参数的迭代器。这个方法通常用于在模型训练和推理中获取参数,尤其是在需要对参数进行操作(如梯度清零、参数更新等)时。# 参数 : 无参数。# 返回值 : 返回一个迭代器,包含模型中所有的参数( tensor )。# .parameters() 方法非常有用,因为它允许你 :# 遍历参数 :遍历模型中的所有参数,这在自定义优化器或进行特殊的参数操作时非常有用。# 梯度清零 :在训练循环中,通常需要清零梯度,可以通过 .zero_() 方法直接在参数上调用。# 参数更新 :在自定义训练循环中,可以手动更新参数。# 参数统计 :统计模型中的参数数量,例如计算模型的总参数量。# 计算模块 m_ 中所有参数的总数。 numel() 方法返回参数中元素的总数。np = sum([x.numel() for x in m_.parameters()]) # number params# 将索引 i 、 来源索引 f 、 模块类型 t 和 参数总数 np 附加到模块实例 m_ 上,以便后续可以访问这些信息。m_.i, m_.f, m_.type, m_.np = i, f, t, np # attach index, 'from' index, type, number params# 使用 logger 记录模块的详细信息,包括 索引 、 来源索引 、 重复次数 、 参数总数 、 模块类型 和 参数 。logger.info('%3s%18s%3s%10.0f %-40s%-30s' % (i, f, n, np, t, args)) # print# list.extend(iterable)# 在 Python 中, .extend() 方法是列表(list)对象的一个方法,用于将一个可迭代对象(如列表、元组、字符串等)的所有元素添加到列表的末尾。# list : 需要扩展的列表对象。# iterable : 一个可迭代对象,其所有元素将被添加到列表中。# 返回值 :# .extend() 方法没有返回值(即返回 None ),因为它直接修改列表对象本身。# 将来源索引 f 扩展到保存列表 save 中。如果 f 是整数,则将其包装在列表中;如果不是,则直接使用 f 。然后,对每个 f 应用格式化操作 % i ,并将结果添加到 save 列表中,除非 x 等于 -1 。# save.extend(...) :extend 方法用于将一个可迭代对象(如列表)的所有元素添加到列表 save 的末尾。# x % i for x in ([f] if isinstance(f, int) else f) if x != -1 :这是一个列表推导式,它生成一个新列表,其中包含满足条件 x != -1 的元素 x ,这些元素经过 x % i 格式化操作。# ([f] if isinstance(f, int) else f) :这是一个条件表达式,它检查 f 是否为整数。 如果 f 是整数( isinstance(f, int) 为 True ),则将 f 包装在列表 [f] 中。 如果 f 不是整数,直接使用 f 。# for x in ([f] if isinstance(f, int) else f) :这个 for 循环遍历由条件表达式生成的列表(如果 f 是整数,则为 [f] ;否则为 f )。# if x != -1 :这个条件语句确保只有当 x 不等于 -1 时,才将 x % i 的结果添加到 save 列表中。# x % i :这是一个格式化操作,它将 x 格式化为字符串,并插入 i 的值。 例如,如果 x 是 'block%d' ,则 x % i 将变为 'block0' , 'block1' 等,具体取决于 i 的值。save.extend(x % i for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist# 将模块实例 m_ 添加到层列表 layers 中。layers.append(m_)# 如果当前是第一个模块(索引 i 为0),则重置通道列表 ch 。if i == 0:ch = []# 将当前模块的输出通道数 c2 添加到通道列表 ch 中。ch.append(c2)# 返回一个包含所有层的 nn.Sequential 容器 和 排序后的保存列表 save 。return nn.Sequential(*layers), sorted(save)8.if __name__ == '__main__':
# 这段代码是一个典型的 Python 脚本入口点,它使用 argparse 库来解析命令行参数,并设置了模型配置、设备选择和日志记录。
# 这是一个常用的 Python 习惯用法,用于判断当前脚本是否作为主程序运行,而不是作为模块导入到其他脚本中。
if __name__ == '__main__':# 创建一个新的 ArgumentParser 对象,用于处理命令行参数。parser = argparse.ArgumentParser()# 向 parser 添加命令行参数。# --cfg :指定模型配置文件的路径,类型为字符串,默认值为 'yolor-csp-c.yaml' 。parser.add_argument('--cfg', type=str, default='yolor-csp-c.yaml', help='model.yaml')# --device :指定使用的设备,例如 GPU 或 CPU,类型为字符串,默认为空字符串。parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')# --profile :一个布尔值参数,用于指示是否对模型进行性能分析,默认为 False 。parser.add_argument('--profile', action='store_true', help='profile model speed')# 解析命令行参数,并将解析后的参数存储在 opt 对象中。opt = parser.parse_args()# 调用 check_file 函数检查 opt.cfg 指定的文件是否存在,如果存在则返回文件路径,否则可能抛出错误或返回默认值。opt.cfg = check_file(opt.cfg) # check file# 调用 set_logging 函数设置日志记录,这个函数可能是自定义的,用于配置日志级别和格式。# def set_logging(rank=-1): -> 它用于配置 Python 的日志记录系统。set_logging()# 调用 select_device 函数根据 opt.device 参数选择使用的设备(GPU或CPU),并返回设备对象。# def select_device(device='', batch_size=None):# -> 它用于选择并配置 PyTorch 模型将使用的计算设备,可以是 CPU 或者一个或多个 GPU。返回一个 torch.device 对象,表示选择的设备。# -> return torch.device('cuda:0' if cuda else 'cpu')device = select_device(opt.device)# Create model# Model(opt.cfg) :根据提供的配置文件 opt.cfg 创建模型实例。这里 Model 是一个类,它接受配置文件路径作为参数,并根据该配置初始化模型。# .to(device) :将模型移动到指定的设备(如GPU或CPU)。这是通过PyTorch的 .to() 方法实现的,它确保模型的所有参数和缓存都被移动到指定的设备。model = Model(opt.cfg).to(device)# 将模型设置为训练模式。这是通过调用模型的 .train() 方法实现的,它会将模型的所有层设置为训练模式,特别是对于那些具有不同训练和评估行为的层(如Dropout和BatchNorm层)。model.train()# 检查是否需要对模型进行性能分析。这是通过检查命令行参数中的 --profile 标志来实现的。if opt.profile:# 如果需要性能分析,则创建一个随机的输入图像张量,形状为 (1, 3, 640, 640) ,其中 1 是批量大小, 3 是颜色通道数(RGB), 640, 640 是图像的尺寸。# .to(device) :将输入图像张量移动到指定的设备。img = torch.rand(1, 3, 640, 640).to(device)# 使用创建的随机图像张量作为输入,调用模型的前向传播函数,并传递 profile=True 参数以启用性能分析。# y 将存储模型的输出,但在这个上下文中,输出的具体内容不是重点,重点是分析模型的性能。y = model(img, profile=True)# Profile# img = torch.rand(8 if torch.cuda.is_available() else 1, 3, 640, 640).to(device)# y = model(img, profile=True)# Tensorboard# from torch.utils.tensorboard import SummaryWriter# tb_writer = SummaryWriter()# print("Run 'tensorboard --logdir=models/runs' to view tensorboard at http://localhost:6006/")# tb_writer.add_graph(model.model, img) # add model to tensorboard# tb_writer.add_image('test', img[0], dataformats='CWH') # add model to tensorboard相关文章:

YOLOv7-0.1部分代码阅读笔记-yolo.py
yolo.py models\yolo.py 目录 yolo.py 1.所需的库和模块 2.class Detect(nn.Module): 3.class IDetect(nn.Module): 4.class IAuxDetect(nn.Module): 5.class IBin(nn.Module): 6.class Model(nn.Module): 7.def parse_model(d, ch): 8.if __name__ __main__…...

【缓存与加速技术实践】Web缓存代理与CDN内容分发网络
文章目录 Web缓存代理Nginx配置缓存代理详细说明 CDN内容分发网络CDN的作用CDN的工作原理CDN内容的获取方式解决缓存集中过期的问题 Web缓存代理 作用: 缓存之前访问过的静态网页资源,以便在再次访问时能够直接从缓存代理服务器获取,减少源…...

MySQL的约束和三大范式
一.约束 什么是约束,为什么要用到约束? 约束就是用于创建表时,给对应的字段添加对应的约束 约束的作用就是当我们用insert into时,如果传入的数据有问题,不符合创建表时我们定的规定,这时MySQL就会自动帮…...

Unity网络通信(part7.分包和黏包)
目录 前言 概念 解决方案 具体代码 总结 分包黏包概念 分包 黏包 解决方案概述 前言 在探讨Unity网络通信的深入内容时,分包和黏包问题无疑是其中的关键环节。以下是对Unity网络通信中分包和黏包问题前言部分的详细解读。 概念 在网络通信中,…...

练习题 - DRF 3.x Overviewses 框架概述
Django REST Framework (DRF) 是一个强大的工具,用于构建 Web APIs。作为 Django 框架的扩展,DRF 提供了丰富的功能和简洁的 API,使得开发 RESTful Web 服务变得更加轻松。对于想要在 Django 环境中实现快速且灵活的 API 开发的开发者来说,DRF 是一个非常有吸引力的选择。学…...

Linux 经典面试八股文
快速鉴别十个题 1,你如何描述Linux文件系统的结构? 答案应包括对/, /etc, /var, /home, /bin, /lib, /usr, 和 /tmp等常见目录的功能和用途的描述。 2,在Linux中如何查看和终止正在运行的进程? 期望的答案应涵盖ps, top, htop, …...

Filter和Listener
一、Filter过滤器 1 概念 可以实现拦截功能,对于指定资源的限定进行拦截,替换,同时还可以提高程序的性能。在Web开发时,不同的Web资源中的过滤操作可以放在同一个Filter中完成,这样可以不用多次编写重复代码…...

Go 项目中实现类似 Java Shiro 的权限控制中间件?
序言: 要在 Go 项目中实现类似 Java Shiro 的权限控制中间件,我们可以分为几个步骤来实现用户的菜单访问权限和操作权限控制。以下是一个基本的实现框架步骤: 目录 一、数据库设计 二、中间件实现 三、使用中间件 四、用户权限管理 五…...

【Javascript】-一些原生的网页设计案例
JavaScript 网页设计案例 1. 动态时钟 功能描述:在网页上显示一个动态更新的时钟,包括小时、分钟和秒。实现思路: 使用 setInterval 函数每秒更新时间。获取当前时间并更新页面上的文本。 代码示例:<div id"clock"…...

SpringBoot开发——Spring Boot 3种定时任务方式
文章目录 一、什么是定时任务二、代码示例1、 @Scheduled 定时任务2、多线程定时任务3、基于接口(SchedulingConfigurer)实现动态更改定时任务3.1 数据库中存储cron信息3.2 pom.xml文件中增加mysql依赖3.3 application.yaml文件中增加mysql数据库配置:3.4 创建定时器3.5 启动…...

Flutter鸿蒙next 实现长按录音按钮及动画特效
在 Flutter 中实现长按录音按钮并且添加动画特效,是一个有趣且实用的功能。本文将通过实现一个具有动画效果的长按录音按钮,带领你一步步了解如何使用 Flutter 完成这个任务,并解释每一部分的实现。 一、功能需求 我们需要一个按钮…...

【计网】实现reactor反应堆模型 --- 框架搭建
没有一颗星, 会因为追求梦想而受伤, 当你真心渴望某样东西时, 整个宇宙都会来帮忙。 --- 保罗・戈埃罗 《牧羊少年奇幻之旅》--- 实现Reactor反应堆模型 1 前言2 框架搭建3 准备工作4 Reactor类的设计5 Connection连接接口6 回调方法 1 …...

力扣中等难度热题——长度为K的子数组的能量值
目录 题目链接:3255. 长度为 K 的子数组的能量值 II - 力扣(LeetCode) 题目描述 示例 提示: 解法一:通过连续上升的长度判断 Java写法: C写法: 相比与Java写法的差别 运行时间 时间复杂…...

JSON格式
JSON(JavaScript Object Notation)是一种轻量级的数据交换格式,易于人和机器阅读和解析。它基于JavaScript的对象表示法,但被广泛用于多种编程语言。 JSON中的数据类型 字符串(String):用双引…...

O-RAN前传Spilt Option 7-2x
Spilt Option 7-2x 下行比特处理上行比特处理相关文章: Open Fronthaul wrt ORAN 联盟被称为下层拆分(LLS),其目标是提高电信市场的灵活性和竞争力。下层拆分是指无线电单元(RU) 和分布式单元(DU) 之间的拆分。 O-RAN前传接口可以在 eCPRI 上传输。eCPR…...

【GeoJSON在线编辑平台】(2)吸附+删除+挖孔+扩展
前言 在上一篇的基础上继续开发,补充上吸附功能、删除矢量、挖孔功能。 实现 1. 吸附 参考官方案例:Snap Interaction 2. 删除 通过 removeFeature 直接移除选中的要素。 3. 挖孔 首先是引入 Turf.js ,然后通过 mask 方法来实现挖孔的…...

确定图像的熵和各向异性 Halcon entropy_gray 解析
1、图像的熵 1.1 介绍 图像熵(image entropy)是图像“繁忙”程度的估计值,它表示为图像灰度级集合的比特平均数,单位比特/像素,也描述了图像信源的平均信息量。熵指的是体系的混乱程度,对于图像而言&#…...

大数据-214 数据挖掘 机器学习理论 - KMeans Python 实现 算法验证 sklearn n_clusters labels
点一下关注吧!!!非常感谢!!持续更新!!! 目前已经更新到了: Hadoop(已更完)HDFS(已更完)MapReduce(已更完&am…...

算法通关(3) -- kmp算法
KMP算法的原理 从题目引出 有两个字符串s1和s2,判断s1字符串是否包含s2字符串,如果包含返回s1包含s2的最左开头位置,不包含返回-1,如果是按照暴力的方法去匹配,以s1的每个字符作为开头,用s2的整体去匹配,…...

5G网卡network connection: disconnected
日志 5G流程中没有报任何错误,但是重新拿地址了,感觉像是驱动层连接断开了,dmesg中日志如下: [ 1526.558377] ippassthrough:set [ ip10.108.40.47 mask27 ip_net10.108.40.32 router10.108.40.33 dns221.12.1.227 221.12.33.227] br-lan […...

在软件开发中正确使用MySQL日期时间类型的深度解析
在日常软件开发场景中,时间信息的存储是底层且核心的需求。从金融交易的精确记账时间、用户操作的行为日志,到供应链系统的物流节点时间戳,时间数据的准确性直接决定业务逻辑的可靠性。MySQL作为主流关系型数据库,其日期时间类型的…...

C++中string流知识详解和示例
一、概览与类体系 C 提供三种基于内存字符串的流,定义在 <sstream> 中: std::istringstream:输入流,从已有字符串中读取并解析。std::ostringstream:输出流,向内部缓冲区写入内容,最终取…...

MySQL中【正则表达式】用法
MySQL 中正则表达式通过 REGEXP 或 RLIKE 操作符实现(两者等价),用于在 WHERE 子句中进行复杂的字符串模式匹配。以下是核心用法和示例: 一、基础语法 SELECT column_name FROM table_name WHERE column_name REGEXP pattern; …...

Hive 存储格式深度解析:从 TextFile 到 ORC,如何选对数据存储方案?
在大数据处理领域,Hive 作为 Hadoop 生态中重要的数据仓库工具,其存储格式的选择直接影响数据存储成本、查询效率和计算资源消耗。面对 TextFile、SequenceFile、Parquet、RCFile、ORC 等多种存储格式,很多开发者常常陷入选择困境。本文将从底…...

Python 包管理器 uv 介绍
Python 包管理器 uv 全面介绍 uv 是由 Astral(热门工具 Ruff 的开发者)推出的下一代高性能 Python 包管理器和构建工具,用 Rust 编写。它旨在解决传统工具(如 pip、virtualenv、pip-tools)的性能瓶颈,同时…...

2025季度云服务器排行榜
在全球云服务器市场,各厂商的排名和地位并非一成不变,而是由其独特的优势、战略布局和市场适应性共同决定的。以下是根据2025年市场趋势,对主要云服务器厂商在排行榜中占据重要位置的原因和优势进行深度分析: 一、全球“三巨头”…...

管理学院权限管理系统开发总结
文章目录 🎓 管理学院权限管理系统开发总结 - 现代化Web应用实践之路📝 项目概述🏗️ 技术架构设计后端技术栈前端技术栈 💡 核心功能特性1. 用户管理模块2. 权限管理系统3. 统计报表功能4. 用户体验优化 🗄️ 数据库设…...
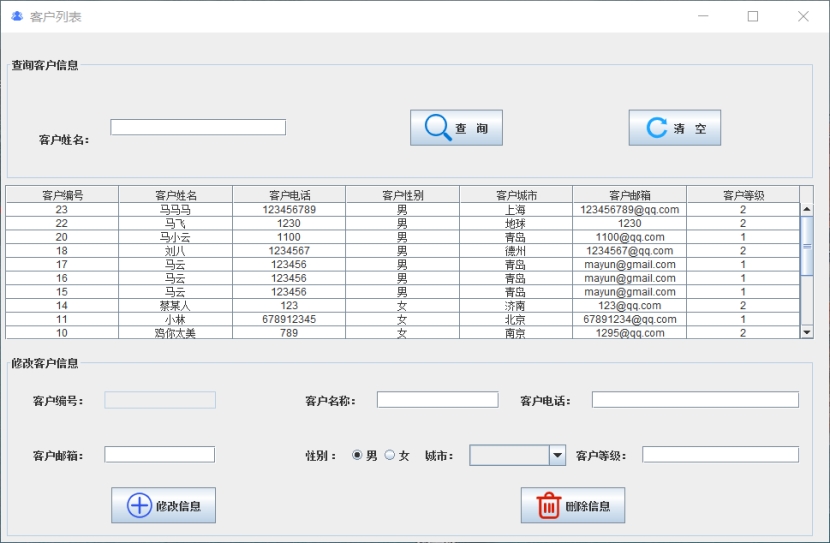
基于Java+MySQL实现(GUI)客户管理系统
客户资料管理系统的设计与实现 第一章 需求分析 1.1 需求总体介绍 本项目为了方便维护客户信息为了方便维护客户信息,对客户进行统一管理,可以把所有客户信息录入系统,进行维护和统计功能。可通过文件的方式保存相关录入数据,对…...
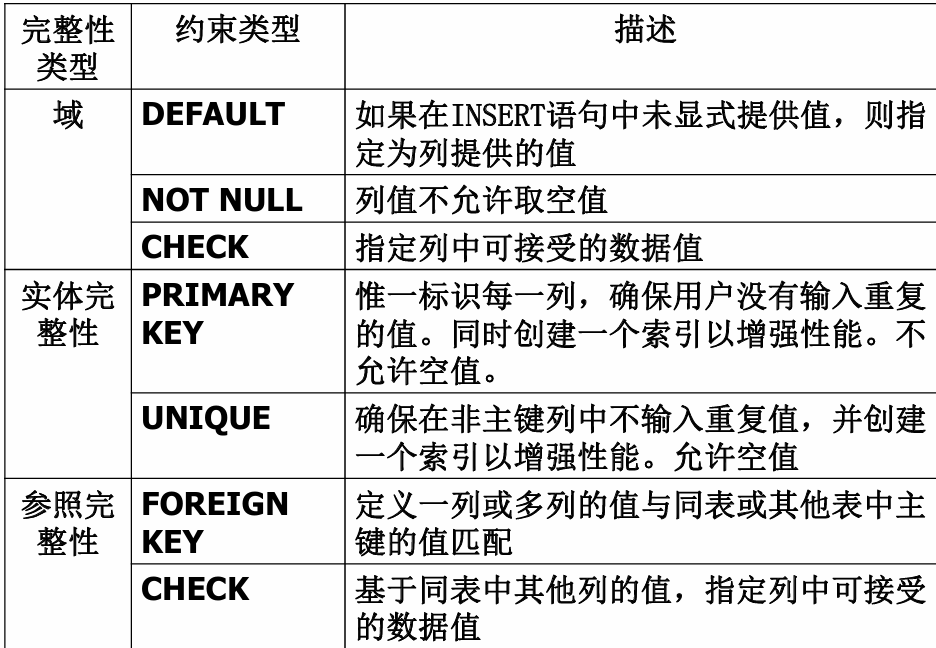
七、数据库的完整性
七、数据库的完整性 主要内容 7.1 数据库的完整性概述 7.2 实体完整性 7.3 参照完整性 7.4 用户定义的完整性 7.5 触发器 7.6 SQL Server中数据库完整性的实现 7.7 小结 7.1 数据库的完整性概述 数据库完整性的含义 正确性 指数据的合法性 有效性 指数据是否属于所定…...

Redis:现代应用开发的高效内存数据存储利器
一、Redis的起源与发展 Redis最初由意大利程序员Salvatore Sanfilippo在2009年开发,其初衷是为了满足他自己的一个项目需求,即需要一个高性能的键值存储系统来解决传统数据库在高并发场景下的性能瓶颈。随着项目的开源,Redis凭借其简单易用、…...