【DBC专题】-10-CAN DBC转换C语言代码Demo_接收Rx报文篇
案例背景(共15页精讲):
该篇博文将告诉您,CAN DBC转换C语言代码Demo,只需传递对应CAN信号关联参数,无需每个信号"左移"和"右移",并举例介绍:在CANoe/Canalyzer中CAPL中的应用:对接收报文,进行解包。其它场景的应用,也可参考该篇。
目录
1 背景:CAN信号在CAN 报文/Frame中位置的决定因素
2 讲解:CAN DBC转换C语言代码Demo
2.1 定义一些宏定义
2.2 定义一些结构体
2.3 API接口函数原型
2.4 对CANFD DBC的支持
2.5 如何使用该API接口
3 举例:在CANoe/Canalyzer中CAPL中的应用:对接收报文,进行解包
3.1 信号的字节顺序Byte Order: Intel小端模式
3.1.1 CAPL文件can的完整代码
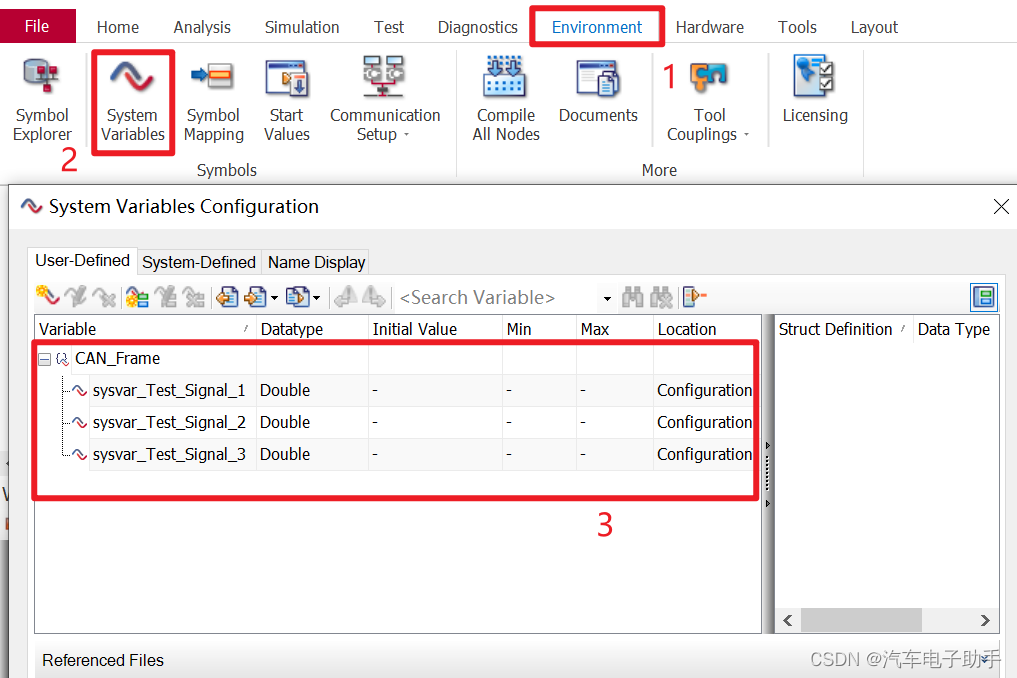
3.1.2 系统变量定义
3.1.3 测试结果
3.2信号的字节顺序Byte Order: Motorola大端模式
3.2.1 CAPL文件can的完整代码
3.2.2 系统变量定义
3.2.3 测试结果
结尾
优质博文推荐阅读(单击下方链接,即可跳转):
Vector工具链
CAN Matrix DBC
CAN Matrix Arxml
1 背景:CAN信号在CAN 报文/Frame中位置的决定因素
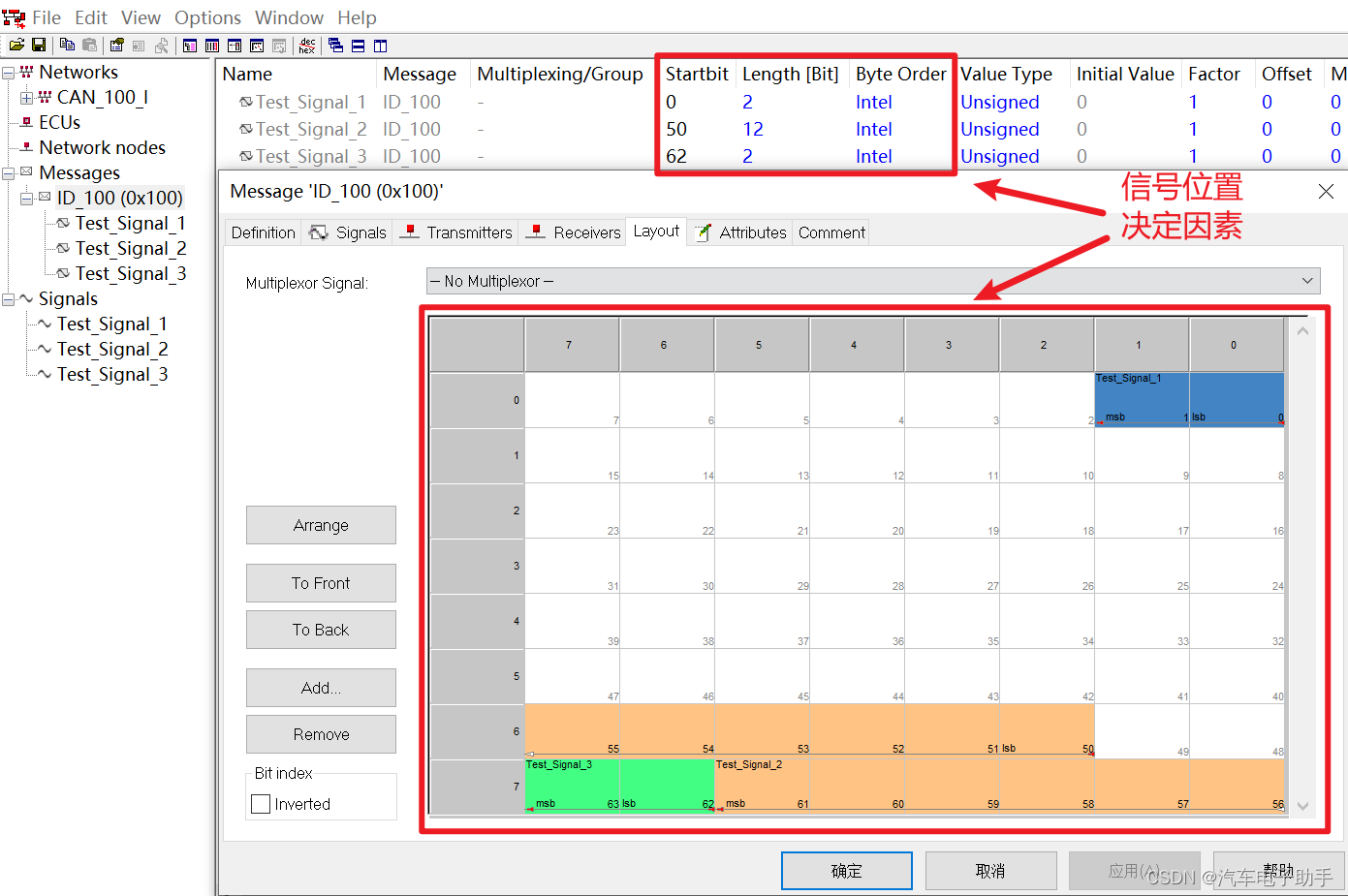
一个CAN信号在CAN 报文/Frame中的位置,由3个条件决定,见图1-1:
- 信号的起始位Startbit:默认为信号的Lsb;
- 信号的长度Length;
- 信号的字节顺序Byte Order: Intel小端模式和Motorola大端模式。
详见博文“【DBC专题】-4-DBC文件中的Signal信号字节顺序Motorola和Intel介绍![]() https://blog.csdn.net/qfmzhu/article/details/111561710”,这里不再重复讲解。
https://blog.csdn.net/qfmzhu/article/details/111561710”,这里不再重复讲解。
下面我们根据这个背景,来设计一个通用算法,封装成一个函数,只需输入几个参数,即可得到对应的信号值。
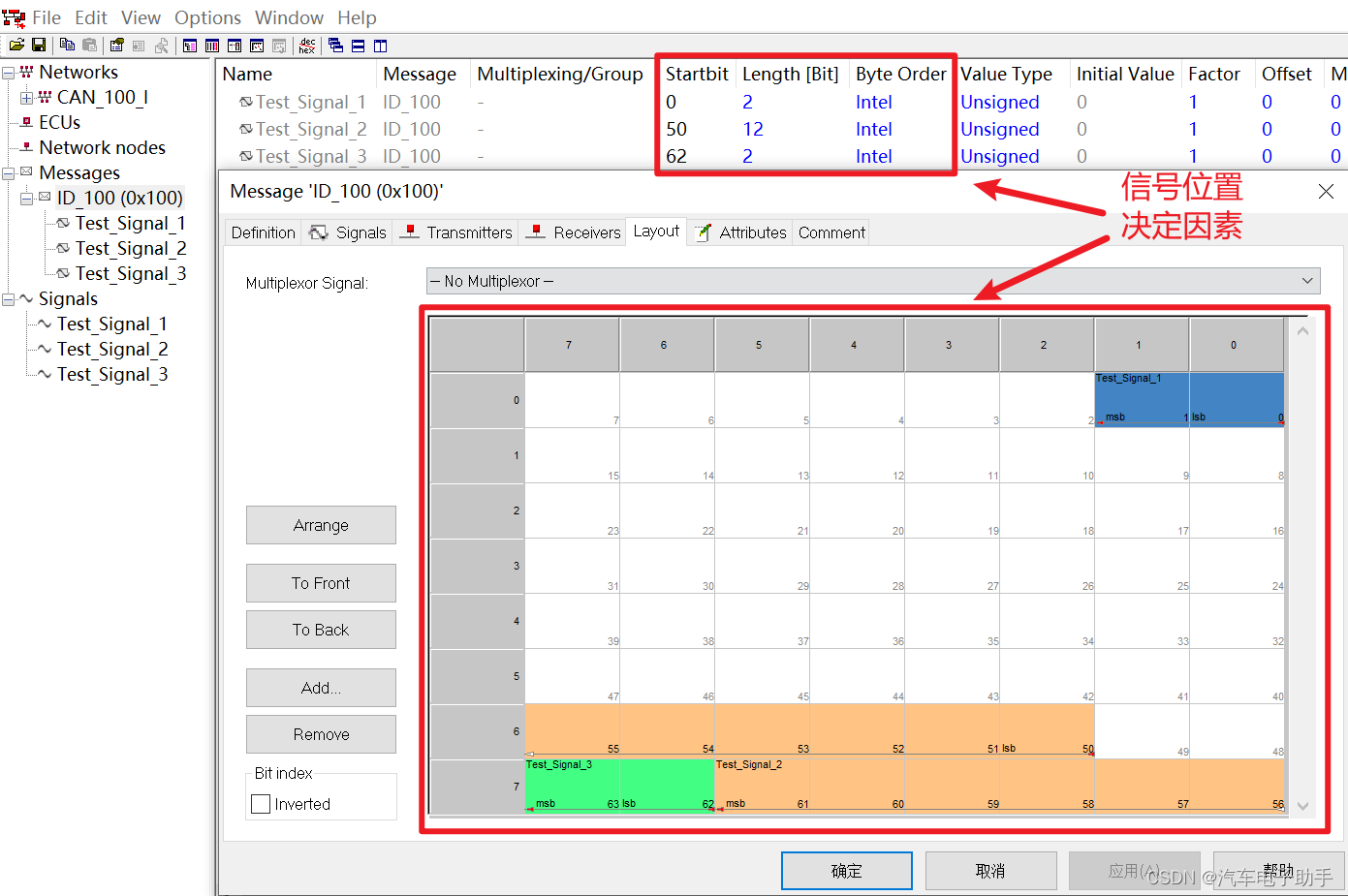
图1-1
2 讲解:CAN DBC转换C语言代码Demo
2.1 定义一些宏定义
#define FRAME_TJW_ZERO_DLC 0 // unit:Byte
#define FRAME_TJW_MAX_DLC 8 // unit:Byte
#define SIGNAL_TJW_ZERO_LENGTH 0 // unit:Bit
#define SIGNAL_TJW_MAX_LENGTH 64 // unit:Bit
#define SIGNAL_TJW_INIT_VALUE 0
#define SIGNAL_TJW_INIT_MASK 0#define SIGNAL_TJW_BYTE_ORDER_INTEL 0
#define SIGNAL_TJW_BYTE_ORDER_MOTOROLA 1#define CAN_SIGNAL_TJW_NORMAL 0
#define CAN_SIGNAL_TJW_NO_VALUE 1
#define CAN_FRAME_TJW_DLC_OUT_OF_RANGE 2
#define INVALID_INPUT_PARAMETERS_TJW 3/** 使用该Demo需注明出处,以表对作者的尊重 **/
/** 版权归CSDN博客“汽车电子助手”所有,https://blog.csdn.net/qfmzhu **/2.2 定义一些结构体
typedef struct
{uint8 Signal_State; // Describes the state of a signaluint64 Signal_Value; // Describes the value of a signal
} Unpack_CAN_Signal;
/** 使用该Demo需注明出处,以表对作者的尊重 **/
/** 版权归CSDN博客“汽车电子助手”所有,https://blog.csdn.net/qfmzhu **/2.3 API接口函数原型
/** 使用该Demo需注明出处,以表对作者的尊重 **/
/** 版权归CSDN博客“汽车电子助手”所有,https://blog.csdn.net/qfmzhu **/Unpack_CAN_Signal Rx_CAN_Frame_Data_Buff_to_CAN_Signal_Hex_Fun(
uint8* data_buff, /**Byte array of CAN data field**/
uint8 signal_start_bit, /**Rang:0~(FRAME_TJW_MAX_DLC * 8 - 1)**/
uint8 signal_length, /**Rang:1~SIGNAL_TJW_MAX_LENGTH**/
boolean signal_byte_order, /**0:Intel;1:Motorola**/
uint8 frame_length) /**Rang:1~FRAME_TJW_MAX_DLC**/
{Unpack_CAN_Signal can_signal;uint8 i = 0;uint8 byte_num = 0;uint8 low_data_byte = 0;uint8 high_data_byte = 0;uint8 low_data_byte_position = 0;uint8 high_data_byte_position = 0;uint8 remaining_bit_number = 0;uint8 remaining_byte_number = 0; uint64 can_signal_mask = SIGNAL_TJW_INIT_MASK;can_signal.Signal_State = CAN_SIGNAL_TJW_NORMAL;can_signal.Signal_Value = SIGNAL_TJW_INIT_VALUE;if(frame_length == FRAME_TJW_ZERO_DLC) /**DLC of CAN frame is 0**/{can_signal.Signal_State = CAN_SIGNAL_TJW_NO_VALUE;}else if(frame_length > FRAME_TJW_MAX_DLC) /**DLC of CAN frame is out of range**/{can_signal.Signal_State = CAN_FRAME_TJW_DLC_OUT_OF_RANGE;}else if((signal_length > (frame_length * 8)) /**Invalid signal_length: The length of the signal is not in the range of DLC**/|| (signal_length > SIGNAL_TJW_MAX_LENGTH) /**Invalid signal_length: The length of the signal exceeds the maximum Unsigned of C language**/|| (signal_length == SIGNAL_TJW_ZERO_LENGTH) /**Invalid signal_length: The length of the signal is not equal to 0**/ ){can_signal.Signal_State = INVALID_INPUT_PARAMETERS_TJW;}else{ /**Byte Order: Intel**/if(signal_byte_order == SIGNAL_TJW_BYTE_ORDER_INTEL) {/**Bytes used by CAN signal,Byte[0] is low byte,Byte[frame_length] is high byte**/low_data_byte = signal_start_bit / 8;high_data_byte = (signal_start_bit + signal_length - 1) / 8; // 2 + 6 - 1 /8 = 0; 2 + 7 - 1 /8 = 1 ; 2 + 14 - 1 /8 = 1 ; 2 + 15 - 1 /8 = 2if((high_data_byte + 1) > frame_length) /** CAN signal is not in the range of DLC**/{can_signal.Signal_State = CAN_FRAME_TJW_DLC_OUT_OF_RANGE;}else{for(i = 0;i < signal_length;i++) /**Generate signal mask according to signal length**/{can_signal_mask |= 0x0000000000000001 << i;}low_data_byte_position = signal_start_bit % 8; /**Distance from the lowest bit of each byte**//**CAN Signal is in a bytes**/if(low_data_byte == high_data_byte) { can_signal.Signal_Value = (((uint64)data_buff[low_data_byte]) >> low_data_byte_position) & can_signal_mask; }/**CAN Signal in multiple bytes**/else{ for(byte_num = low_data_byte;byte_num <= high_data_byte;byte_num++){if(byte_num == low_data_byte){can_signal.Signal_Value |= ((uint64)data_buff[low_data_byte]) >> low_data_byte_position;}else{can_signal.Signal_Value |= ((uint64)data_buff[byte_num]) << ((byte_num - low_data_byte - 1) * 8 + (8 - low_data_byte_position));} }can_signal.Signal_Value = can_signal.Signal_Value & can_signal_mask; } }}/**Byte Order: Motorola**/else /**signal_byte_order == SIGNAL_TJW_BYTE_ORDER_MOTOROLA**/{/**Bytes used by CAN signal,Byte[0] is low byte,Byte[frame_length] is high byte**/high_data_byte = signal_start_bit / 8; if((high_data_byte + 1) > frame_length) /** CAN signal is not in the range of DLC**/{can_signal.Signal_State = CAN_FRAME_TJW_DLC_OUT_OF_RANGE;}else{for(i = 0;i < signal_length;i++) /**Generate signal mask according to signal length**/{can_signal_mask |= 0x0000000000000001 << i;}high_data_byte_position = signal_start_bit % 8; /**Distance from the lowest bit of each byte**//**CAN Signal is in a bytes**/if(signal_length <= (8 - high_data_byte_position)){ can_signal.Signal_Value = (((uint64)data_buff[high_data_byte]) >> high_data_byte_position) & can_signal_mask; }/**CAN Signal in multiple bytes**/else{ remaining_bit_number = signal_length - (8 - high_data_byte_position); // 剩余bit = 12 - (8 - 2) = 6if((remaining_bit_number % 8) != 0) {remaining_byte_number = remaining_bit_number / 8 + 1; // remaining_byte_number = 1}else{remaining_byte_number = remaining_bit_number / 8;}for(byte_num = high_data_byte;byte_num >= (high_data_byte - remaining_byte_number);byte_num--) // high_data_byte = 2 remaining_byte_number = 1{ if(byte_num == high_data_byte){can_signal.Signal_Value |= ((uint64)data_buff[high_data_byte]) >> high_data_byte_position;}else{can_signal.Signal_Value |= ((uint64)data_buff[byte_num]) << ((high_data_byte - byte_num - 1) * 8 + (8 - high_data_byte_position));} if(byte_num == 0) {break;} }can_signal.Signal_Value = can_signal.Signal_Value & can_signal_mask; } } }}return can_signal;
}
/** 使用该Demo需注明出处,以表对作者的尊重 **/
/** 版权归CSDN博客“汽车电子助手”所有,https://blog.csdn.net/qfmzhu **/2.4 对CANFD DBC的支持
只需将宏定义FRAME_TJW_MAX_DLC的值由8调整为64,即可适配CANFD DBC。
2.5 如何使用该API接口
1、提供的demo,使用了uint8,uint64,boolean类型,在将该代码集成至开发环境中,需要注意这些类型的替换:
- typedef unsigned char uint8
- typedef unsigned long long uint64
2、调用函数Rx_CAN_Frame_Data_Buff_to_CAN_Signal_Hex_Fun时,需要确认传参data_buff,signal_start_bit,signal_length,signal_byte_order,frame_length的准确性,需与DBC保持一致,这样您可以得到对应信号的状态与值;
3 举例:在CANoe/Canalyzer中CAPL中的应用:对接收报文,进行解包
CAPL语法和C语言有一些差异,我们将第2.3章节中的demo稍作修改,以满足测需要。其它场景的应用与其类似。
3.1 信号的字节顺序Byte Order: Intel小端模式
3.1.1 CAPL文件can的完整代码
/** 使用该Demo需注明出处,以表对作者的尊重 **/
/** 版权归CSDN博客“汽车电子助手”所有,https://blog.csdn.net/qfmzhu **/
/*@!Encoding:936*/
includes
{}variables
{byte CAN_Data_Byte[8];byte Signal_State;word Signal_Value;
}on message 0x100
{CAN_Data_Byte[0] = this.byte(0);CAN_Data_Byte[1] = this.byte(1);CAN_Data_Byte[2] = this.byte(2);CAN_Data_Byte[3] = this.byte(3);CAN_Data_Byte[4] = this.byte(4); CAN_Data_Byte[5] = this.byte(5); CAN_Data_Byte[6] = this.byte(6);CAN_Data_Byte[7] = this.byte(7);@sysvar::CAN_Frame::sysvar_Test_Signal_1 = Rx_CAN_Frame_Data_Buff_to_CAN_Signal_Hex(0,2,8);@sysvar::CAN_Frame::sysvar_Test_Signal_2 = Rx_CAN_Frame_Data_Buff_to_CAN_Signal_Hex(50,12,8);@sysvar::CAN_Frame::sysvar_Test_Signal_3 = Rx_CAN_Frame_Data_Buff_to_CAN_Signal_Hex(62,2,8);
}word Rx_CAN_Frame_Data_Buff_to_CAN_Signal_Hex(
byte signal_start_bit, /**Rang:0~(8 * 8 - 1)**/
byte signal_length, /**Rang:1~64**/
byte frame_length) /**Rang:1~8**/
{byte i = 0;byte byte_num = 0;byte low_data_byte = 0;byte high_data_byte = 0;byte low_data_byte_position = 0;byte high_data_byte_position = 0;byte remaining_bit_number = 0;byte remaining_byte_number = 0; word can_signal_mask = 0;Signal_State = 0;Signal_Value = 0;if(frame_length == 0) /**DLC of CAN frame is 0**/{Signal_State = 1;}else if(frame_length > 8) /**DLC of CAN frame is out of range**/{Signal_State = 2;}else if((signal_length > (frame_length * 8)) /**Invalid signal_length: The length of the signal is not in the range of DLC**/|| (signal_length > 16) /**Invalid signal_length: The length of the signal exceeds the maximum Unsigned of C language**/|| (signal_length == 0) /**Invalid signal_length: The length of the signal is not equal to 0**/ ){Signal_State = 3;}else{/**Byte Order: Intel**/{/**Bytes used by CAN signal,Byte[0] is low byte,Byte[frame_length] is high byte**/low_data_byte = signal_start_bit / 8;high_data_byte = (signal_start_bit + signal_length - 1) / 8; // 2 + 6 - 1 /8 = 0; 2 + 7 - 1 /8 = 1 ; 2 + 14 - 1 /8 = 1 ; 2 + 15 - 1 /8 = 2if((high_data_byte + 1) > frame_length) /** CAN signal is not in the range of DLC**/{Signal_State = 2;}else{ for(i = 0;i < signal_length;i++) /**Generate signal mask according to signal length**/{can_signal_mask |= 0x0000000000000001 << i;}low_data_byte_position = signal_start_bit % 8; /**Distance from the lowest bit of each byte**//**CAN Signal is in a bytes**/if(low_data_byte == high_data_byte) { Signal_Value = (((word)CAN_Data_Byte[low_data_byte]) >> low_data_byte_position) & can_signal_mask; }/**CAN Signal in multiple bytes**/else{ for(byte_num = low_data_byte;byte_num <= high_data_byte;byte_num++){ if(byte_num == low_data_byte){ Signal_Value |= ((word)CAN_Data_Byte[low_data_byte]) >> low_data_byte_position;}else{ Signal_Value |= ((word)CAN_Data_Byte[byte_num]) << ((byte_num - low_data_byte - 1) * 8 + (8 - low_data_byte_position));} }Signal_Value = Signal_Value & can_signal_mask; } }}}return Signal_Value;
}
/** 使用该Demo需注明出处,以表对作者的尊重 **/
/** 版权归CSDN博客“汽车电子助手”所有,https://blog.csdn.net/qfmzhu **/3.1.2 系统变量定义
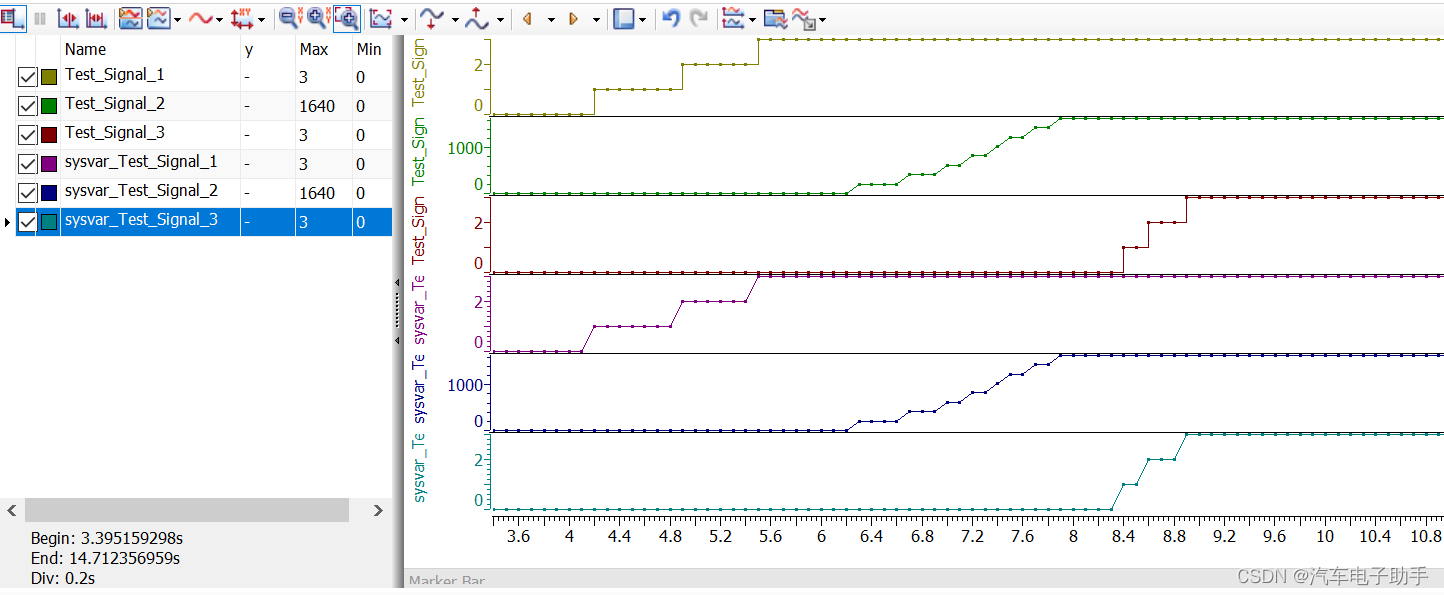
3.1.3 测试结果
使用的DBC:
CAN DBC中信号与系统变量的解析结果一致:
3.2信号的字节顺序Byte Order: Motorola大端模式
3.2.1 CAPL文件can的完整代码
/** 使用该Demo需注明出处,以表对作者的尊重 **/
/** 版权归CSDN博客“汽车电子助手”所有,https://blog.csdn.net/qfmzhu **/
/*@!Encoding:936*/
includes
{}variables
{byte CAN_Data_Byte[8];byte Signal_State;word Signal_Value;
}on message 0x100
{CAN_Data_Byte[0] = this.byte(0);CAN_Data_Byte[1] = this.byte(1);CAN_Data_Byte[2] = this.byte(2);CAN_Data_Byte[3] = this.byte(3);CAN_Data_Byte[4] = this.byte(4); CAN_Data_Byte[5] = this.byte(5); CAN_Data_Byte[6] = this.byte(6);CAN_Data_Byte[7] = this.byte(7); @sysvar::CAN_Frame::sysvar_Test_Signal_4 = Rx_CAN_Frame_Data_Buff_to_CAN_Signal_Hex(6,2,8);@sysvar::CAN_Frame::sysvar_Test_Signal_5 = Rx_CAN_Frame_Data_Buff_to_CAN_Signal_Hex(10,12,8);@sysvar::CAN_Frame::sysvar_Test_Signal_6 = Rx_CAN_Frame_Data_Buff_to_CAN_Signal_Hex(56,2,8);
}word Rx_CAN_Frame_Data_Buff_to_CAN_Signal_Hex(
byte signal_start_bit, /**Rang:0~(8 * 8 - 1)**/
byte signal_length, /**Rang:1~64**/
byte frame_length) /**Rang:1~8**/
{byte i = 0;byte byte_num = 0;byte low_data_byte = 0;byte high_data_byte = 0;byte low_data_byte_position = 0;byte high_data_byte_position = 0;byte remaining_bit_number = 0;byte remaining_byte_number = 0; word can_signal_mask = 0;Signal_State = 0;Signal_Value = 0;if(frame_length == 0) /**DLC of CAN frame is 0**/{Signal_State = 1;}else if(frame_length > 8) /**DLC of CAN frame is out of range**/{Signal_State = 2;}else if((signal_length > (frame_length * 8)) /**Invalid signal_length: The length of the signal is not in the range of DLC**/|| (signal_length > 16) /**Invalid signal_length: The length of the signal exceeds the maximum Unsigned of C language**/|| (signal_length == 0) /**Invalid signal_length: The length of the signal is not equal to 0**/ ){Signal_State = 3;}else{/**Byte Order: Motorola**/{/**Bytes used by CAN signal,Byte[0] is low byte,Byte[frame_length] is high byte**/high_data_byte = signal_start_bit / 8; if((high_data_byte + 1) > frame_length) /** CAN signal is not in the range of DLC**/{Signal_State = 2;}else{for(i = 0;i < signal_length;i++) /**Generate signal mask according to signal length**/{can_signal_mask |= 0x0000000000000001 << i;}high_data_byte_position = signal_start_bit % 8; /**Distance from the lowest bit of each byte**//**CAN Signal is in a bytes**/if(signal_length <= (8 - high_data_byte_position)){ Signal_Value = (((word)CAN_Data_Byte[high_data_byte]) >> high_data_byte_position) & can_signal_mask; }/**CAN Signal in multiple bytes**/else{ remaining_bit_number = signal_length - (8 - high_data_byte_position); // 剩余bit = 12 - (8 - 2) = 6if((remaining_bit_number % 8) != 0) {remaining_byte_number = remaining_bit_number / 8 + 1; // remaining_byte_number = 1}else{remaining_byte_number = remaining_bit_number / 8;}for(byte_num = high_data_byte;byte_num >= (high_data_byte - remaining_byte_number);byte_num--) // high_data_byte = 2 remaining_byte_number = 1{ if(byte_num == high_data_byte){Signal_Value |= ((word)CAN_Data_Byte[high_data_byte]) >> high_data_byte_position;}else{Signal_Value |= ((word)CAN_Data_Byte[byte_num]) << ((high_data_byte - byte_num - 1) * 8 + (8 - high_data_byte_position));} if(byte_num == 0) {break;} }Signal_Value = Signal_Value & can_signal_mask; } } }}return Signal_Value;
}
/** 使用该Demo需注明出处,以表对作者的尊重 **/
/** 版权归CSDN博客“汽车电子助手”所有,https://blog.csdn.net/qfmzhu **/
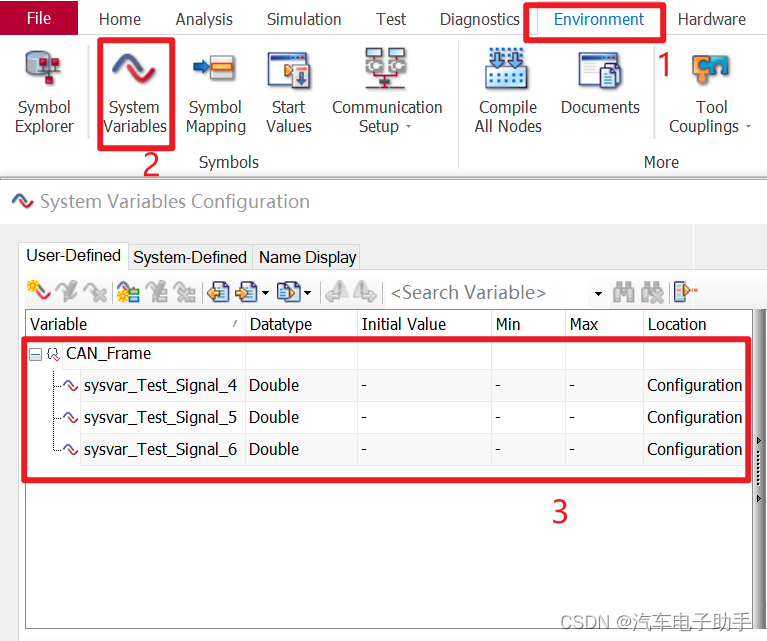
3.2.2 系统变量定义
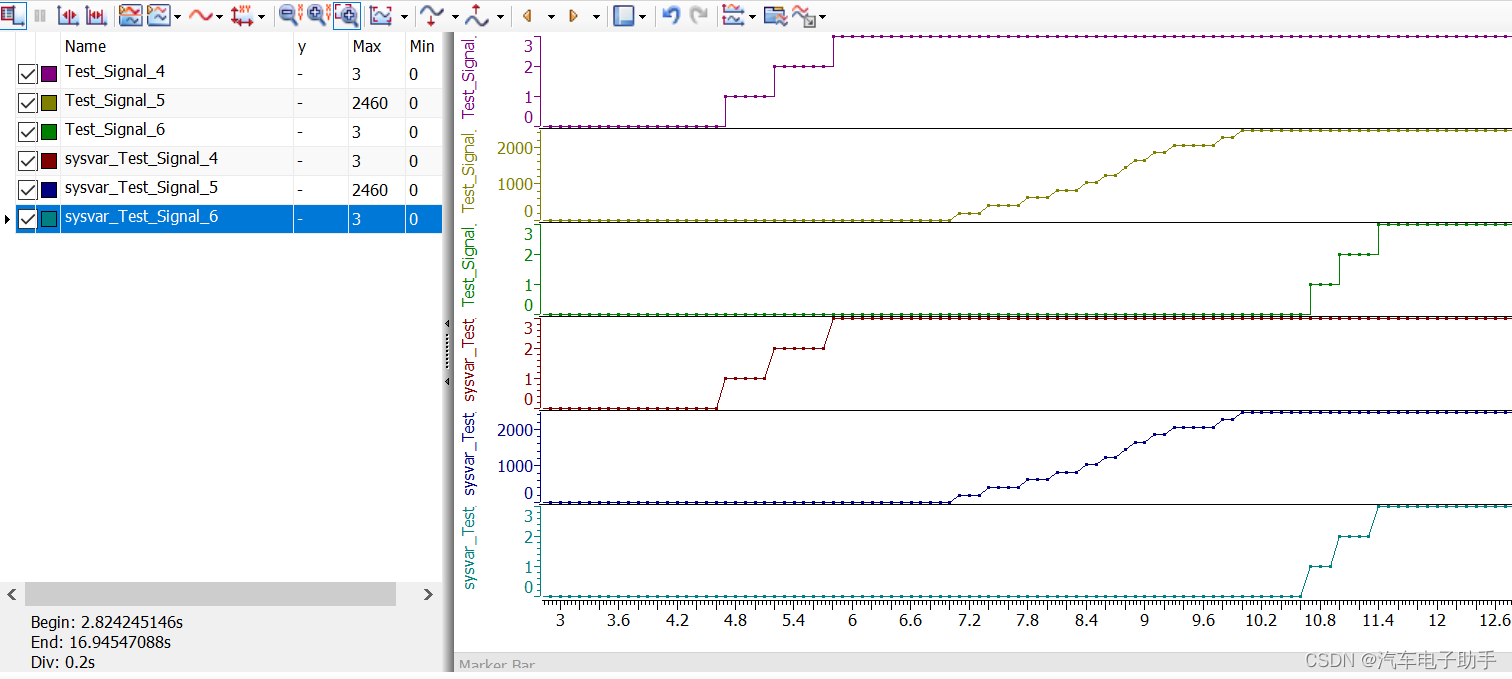
3.2.3 测试结果
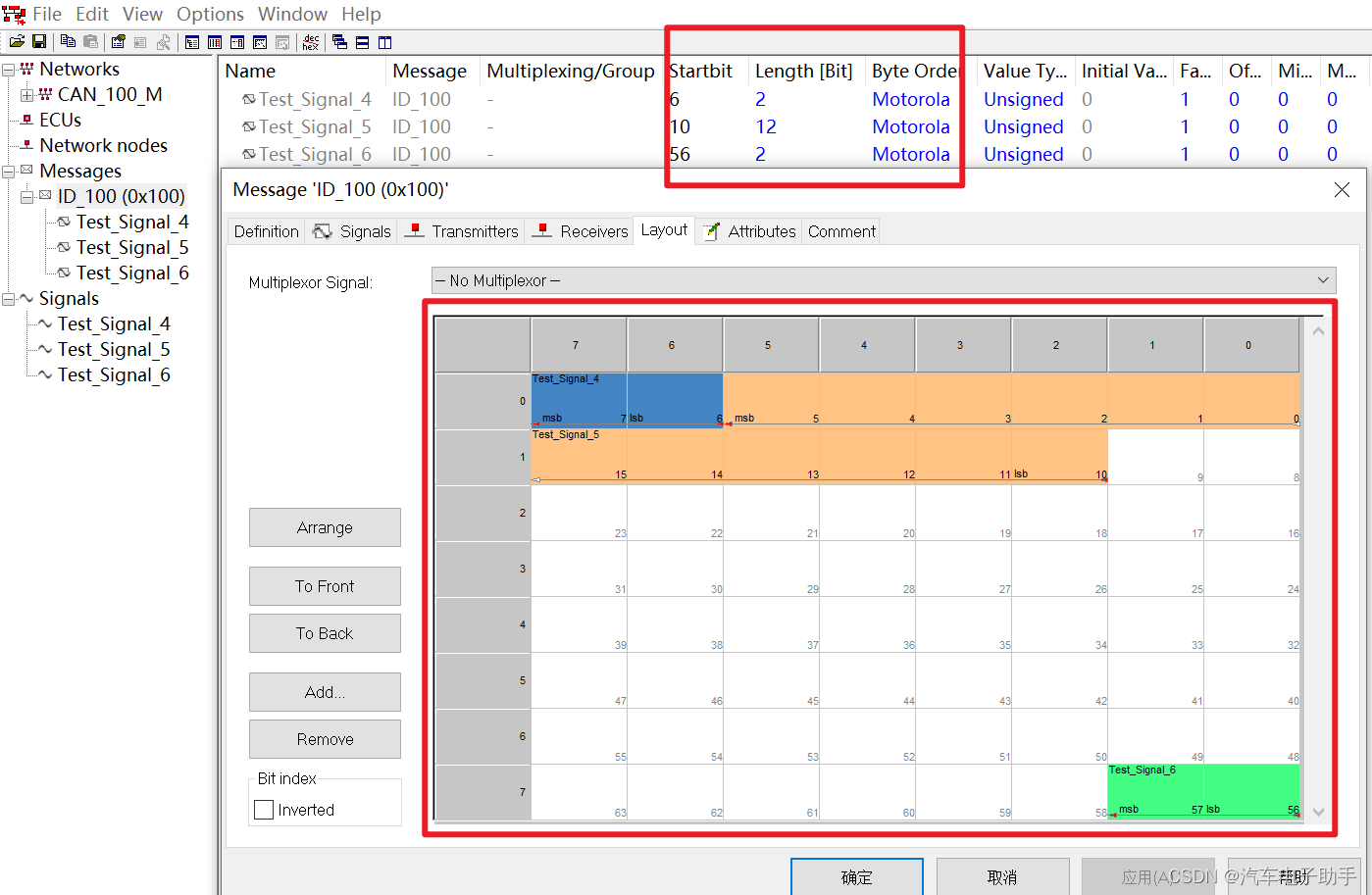
使用的DBC:
CAN DBC中信号与系统变量的解析结果一致:
结尾
获取更多“汽车电子资讯”和“工具链使用”,
请关注CSDN博客“汽车电子助手”,做您的好助手。
相关文章:
【DBC专题】-10-CAN DBC转换C语言代码Demo_接收Rx报文篇
案例背景(共15页精讲): 该篇博文将告诉您,CAN DBC转换C语言代码Demo,只需传递对应CAN信号关联参数,无需每个信号"左移"和"右移",并举例介绍:在CANoe/Canalyzer中CAPL中的应用ÿ…...

AtCoder292 E 思维
题意: 给定一副n(n≤3000)n(n\leq 3000)n(n≤3000)个顶点,mmm条有向边的图,可以在图中添加有向边,求添加的最少边数,使得这副图满足:如果顶点aaa到顶点bbb有边,顶点bbb到ccc右有边,…...

20230309英语学习
What Is Sleep Talking? We Look at the Science 为什么人睡觉会说梦话?来看看科学咋说 Nearly everyone has a story about people talking in their sleep.Though it tends to be more common in children, it can happen at any age:A 2010 study in the jour…...

CAD转换PDF格式怎么弄?教你几种方法轻松搞定!
CAD是从事与艺术创作相关等行业的打工人们必需的工作软件,可以用来完成建筑设计图、设计图纸等。在日常的工作中,一些伙伴经常需要传输图纸给合作方来完成探讨。但是CAD图纸需要使用专业软件才能打开,这就给文件传送带来了一定的困难。而且传…...

AtCoder 259E LCM
题意: 以唯一分解形式给出nnn个数: aipi,1ei,1pi,2ei,2...pi,tei,ta_{i}p_{i,1}^{e_{i,1}}p_{i,2}^{e_{i,2}}...p_{i,t}^{e_{i,t}} aipi,1ei,1pi,2ei,2...pi,tei,t 现在可以将某个数改为111,求所有改法中,有多少个…...

MQTT协议-取消订阅和取消订阅确认
MQTT协议-取消订阅和取消订阅确认 客户端向服务器取消订阅 取消订阅的前提是客户端已经通过CONNECT报文连接上服务器,并且订阅了一个主题 UNSUBSCRIBE—取消订阅 取消订阅的报文同样是由固定报头可变报头有效载荷组成 固定报头由两个字节组成,第一个…...

90后小伙,用低代码“整顿”旅游业,年入2000万,他是怎么做到的?
热爱旅游的92年成都小伙猴哥,大学毕业后开了一家旅行社,主要从事川藏、云南定制游服务。 从今年春节开始,国内各地旅游业开始复苏,向旅行社打电话咨询的人越来越多。 旅游的人多是好事,也是一种烦恼,因为…...
C51---PWM 脉冲宽度调制
1.PWM:脉冲宽度调制,它是通过一系列脉冲宽度进行调制,等效出所需要的波形(包含形状以及幅值)。对模拟信号电平进行数字编码。也就是说通过调节占空比的变化来调节信号、能量等的变化,占空比就是指在一个周期内,信号处于…...
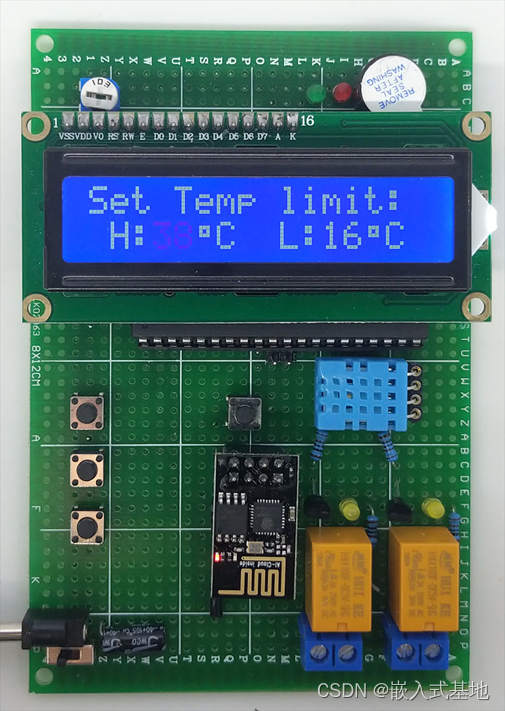
毕业设计 基于51单片机WIFI智能家居系统设计
基于51单片机WIFI智能家居系统设计1、毕业设计选题原则说明(重点)2、项目资料2.1 系统框架2.2 系统功能3、部分电路设计3.1 STC89C52单片机最小系统电路设计3.2 ESP8266 WIFI电路设计3.3 DHT11温湿度传感器电路设计4、部分代码展示4.1 LCD12864显示字符串…...
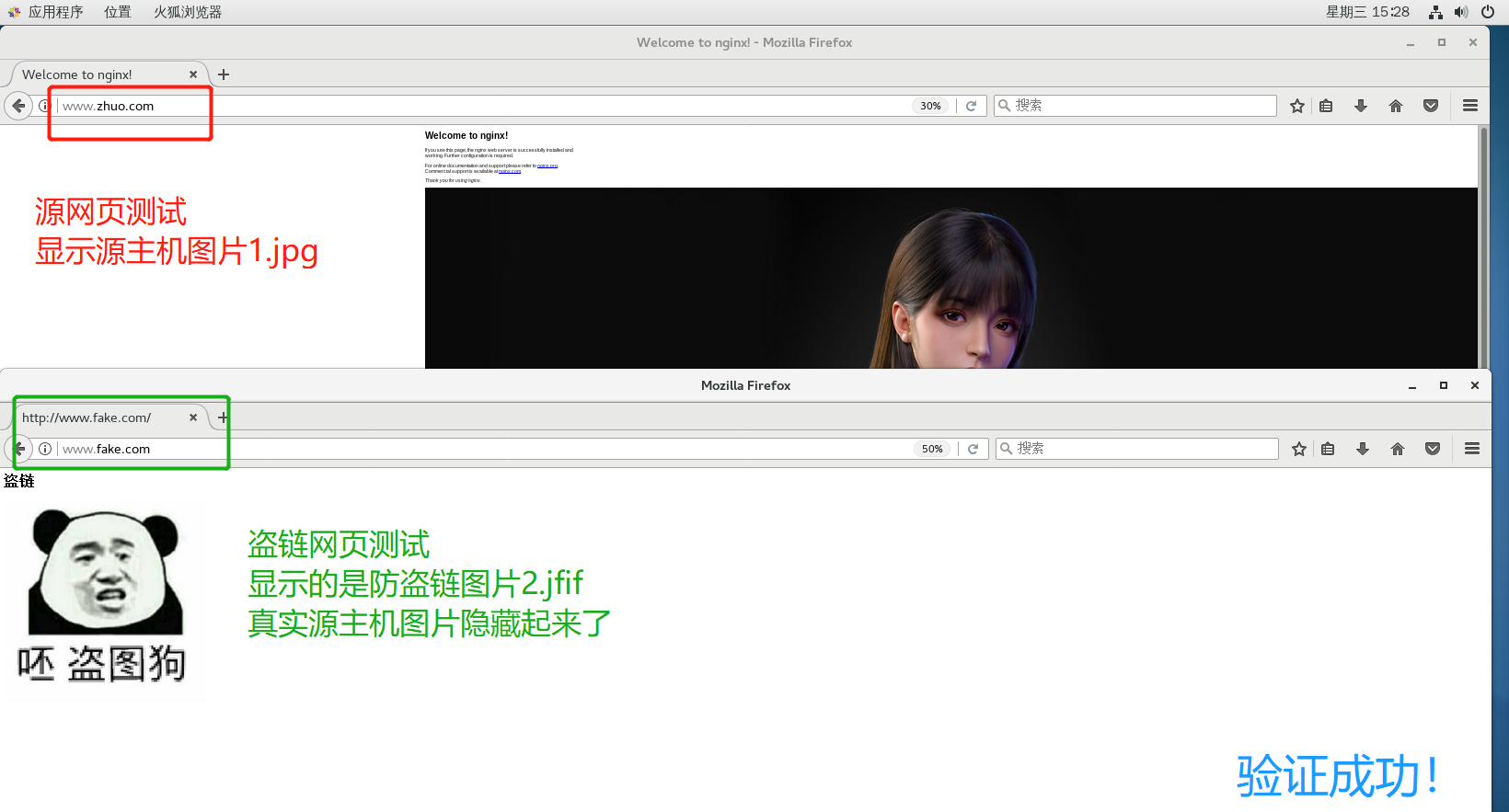
Nginx服务优化措施与配置防盗链
目录 一.优化Nginx的相关措施 二.隐藏/查看版本号 三.修改用户与组 四.设置缓存时间 五.日志切割脚本 六.设置连接超时控制连接访问时间 七.开启多进程 八.配置网页压缩 九.配置防盗链 1.配置web源主机(192.168.79.210 www.zhuo.com) 1.1 安装…...
Java 某厂面试题真题合集
哈喽~大家好,这篇来看看Java 某厂面试题真题合集。 🥇个人主页:个人主页 🥈 系列专栏:【日常学习上的分享】 🥉与这篇相关的文章: Spr…...

很特别的5G市场,5.75亿部手机,却有11亿5G用户,这是怎么了?
中国在5G商用方面已取得了巨大的成绩,这是毋庸置疑的,不过近期公布的一份数据却相当特别,5G手机用户数为5.75亿,而开通了5G套餐的用户数却已超过11亿,这数据对比有点意思。中国在5G商用方面推进很快,建成的…...

go modules
文章目录1. 简介示例1. 示例——同一项目2. 示例——不同项目3. 示例——添加远程模块依赖库1. 简介 go module是Go1.11版本之后官方推出的版本管理工具,并且从Go1.13版本开始,go module将是Go语言默认的依赖管理工具。到今天Go1.14版本推出之后Go modu…...

Baklib客户故事:快递助手ERP
快递助手ERP以多平台多店铺订单管理为核心,集打单发货、商品、库存、采购、售后于一体,中小商家易上手的轻量级ERP,可以满足满足微商、自建商城、档口货源网、一件代发等不同类型客户的打单需求,通过开放平台API接口,自…...
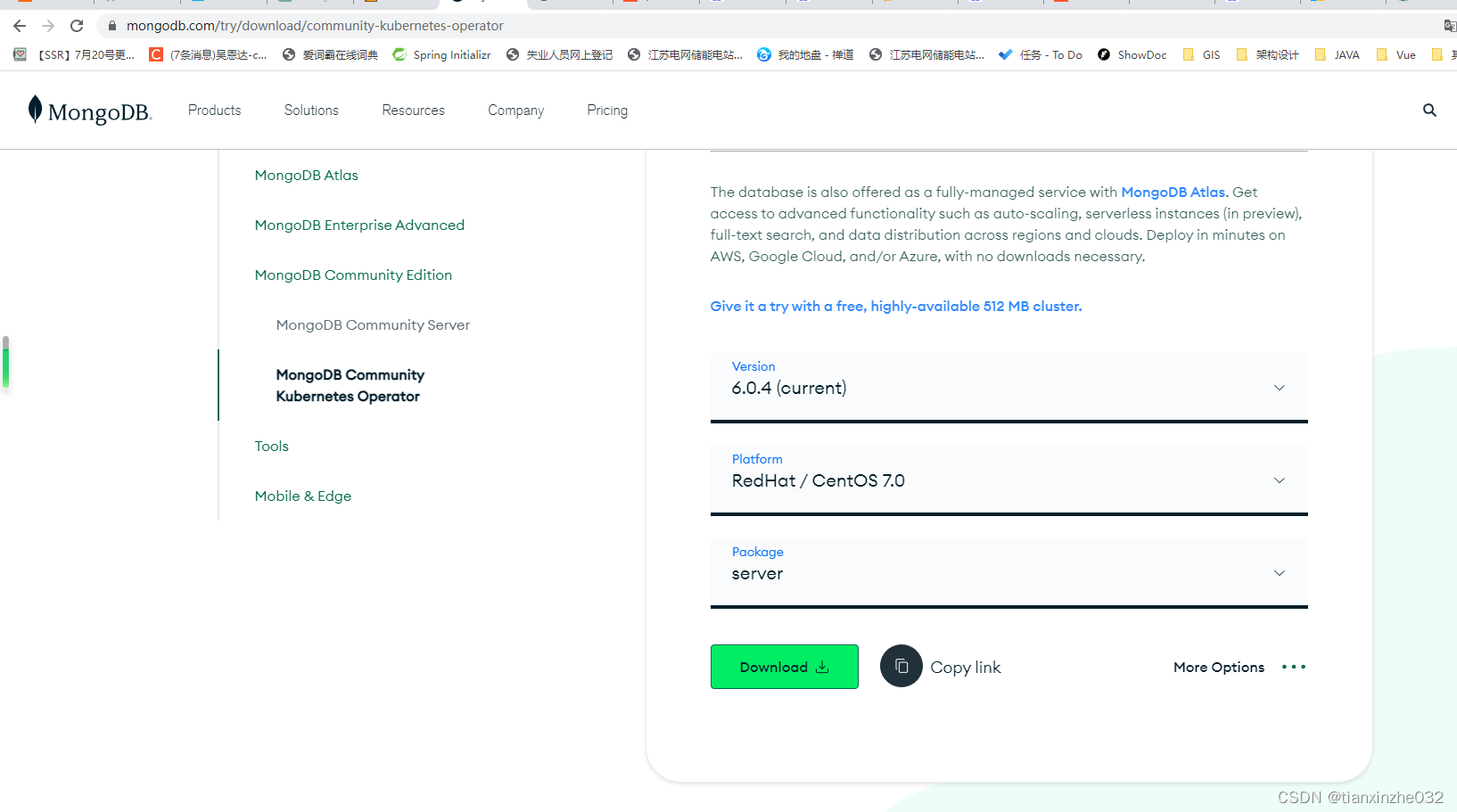
MongoDB学习(java版)
MongoDB概述 结构化数据库 结构化数据库是一种使用结构化查询语言(SQL)进行管理和操作的数据库,它们的数据存储方式是基于表格和列的。结构化数据库要求数据预先定义数据模式和结构,然后才能存储和查询数据。结构化数据库通常…...

RK3568平台开发系列讲解(显示篇)什么是DRM
🚀返回专栏总目录 文章目录 一、DRM介绍二、DRM与framebuffer的区别沉淀、分享、成长,让自己和他人都能有所收获!😄 📢本篇文章将介绍什么是DRM。 一、DRM介绍 DRM 是 Linux 目前主流的图形显示框架,相比FB架构,DRM更能适应当前日益更新的显示硬件。 比如FB原生不支…...

Python蓝桥杯训练:基本数据结构 [二叉树] 上
Python蓝桥杯训练:基本数据结构 [二叉树] 上 文章目录Python蓝桥杯训练:基本数据结构 [二叉树] 上一、前言二、有关二叉树理论基础1、二叉树的基本定义2、二叉树的常见类型3、二叉树的遍历方式三、有关二叉树的层序遍历的题目1、[二叉树的层序遍历](http…...
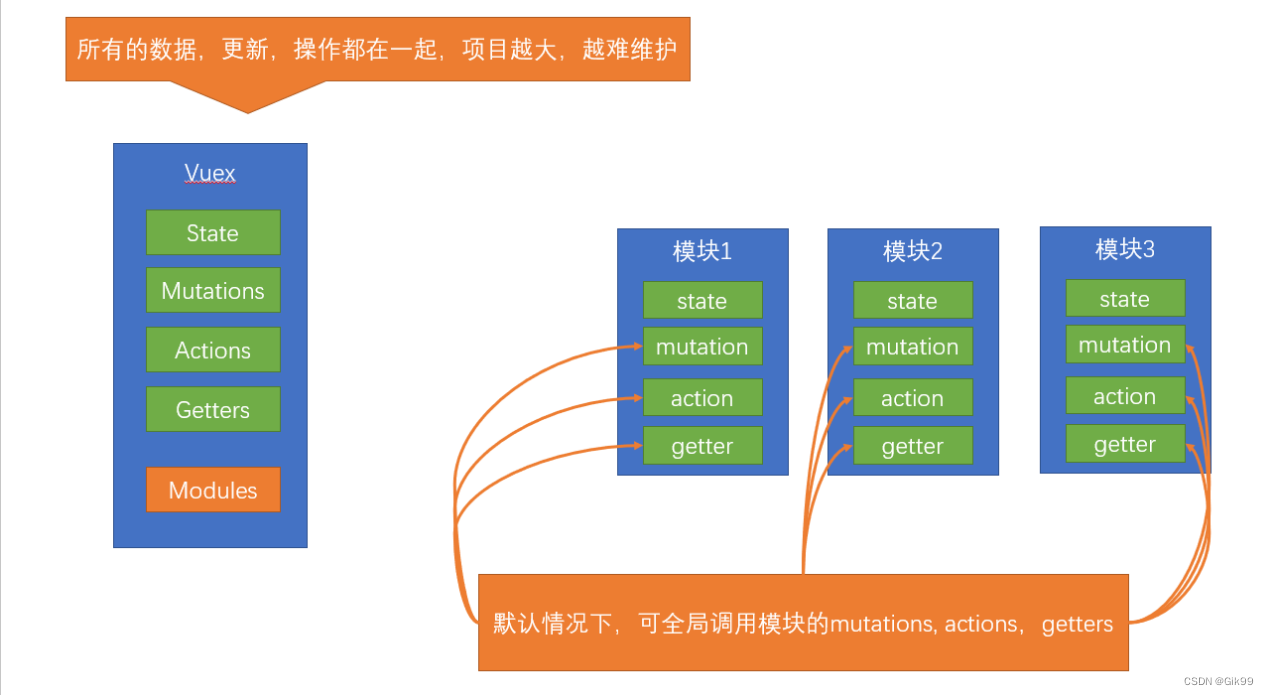
vuex基础之初始化功能、state、mutations、getters、模块化module的使用
vuex基础之初始化功能、state、mutations、getters、模块化module的使用一、Vuex的介绍二、初始化功能三、state3.1 定义state3.2 获取state3.2.1 原始形式获取3.2.2 辅助函数获取(mapState)四、mutations4.1 定义mutations4.2 调用mutations4.2.1 原始形式调用($store)4.2.2 辅…...

WebSphere中间件漏洞总结
WebSphere中间件漏洞总结 一、WebSphere简介 WebSphere为SOA(面向服务架构)环境提供软件,以实现动态的、互联的业务流程,为所有业务情形提供高度有效的应用程序基础架构。WebSphere是IBM的应用程序和集成软件平台,包含所有必要的中间件基础架构(包括服务器、服务和工具)…...

Unity之ASE实现影魔灵魂收集特效
前言 我们今天来实现一下Dota中的影魔死亡后,灵魂收集的特效。效果如下: 实现原理 1.先添加一张FlowMap图,这张图的UV是根据默认UV图,用PS按照我们希望的扭曲方向修改的如下图所示: 2.通过FlowMap图,我…...

在软件开发中正确使用MySQL日期时间类型的深度解析
在日常软件开发场景中,时间信息的存储是底层且核心的需求。从金融交易的精确记账时间、用户操作的行为日志,到供应链系统的物流节点时间戳,时间数据的准确性直接决定业务逻辑的可靠性。MySQL作为主流关系型数据库,其日期时间类型的…...
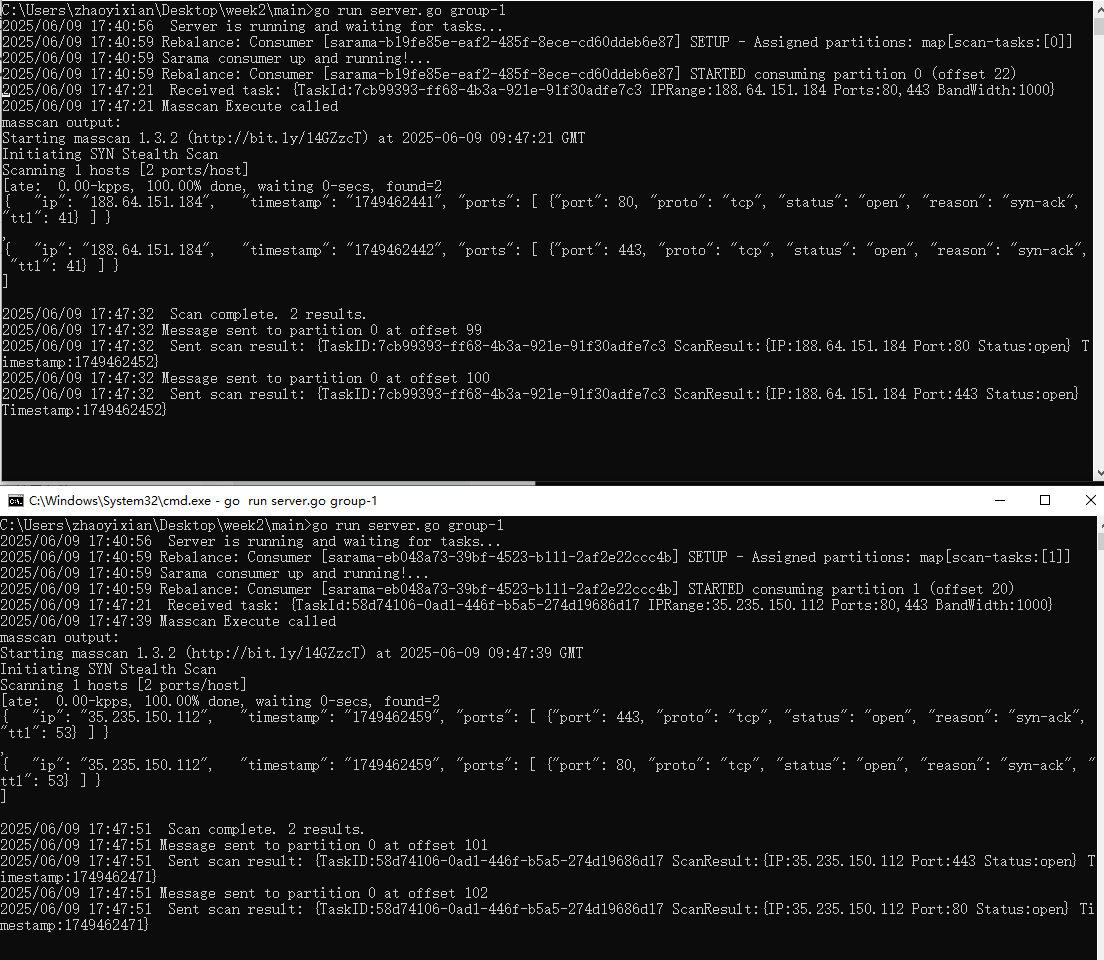
【kafka】Golang实现分布式Masscan任务调度系统
要求: 输出两个程序,一个命令行程序(命令行参数用flag)和一个服务端程序。 命令行程序支持通过命令行参数配置下发IP或IP段、端口、扫描带宽,然后将消息推送到kafka里面。 服务端程序: 从kafka消费者接收…...

调用支付宝接口响应40004 SYSTEM_ERROR问题排查
在对接支付宝API的时候,遇到了一些问题,记录一下排查过程。 Body:{"datadigital_fincloud_generalsaas_face_certify_initialize_response":{"msg":"Business Failed","code":"40004","sub_msg…...

论文浅尝 | 基于判别指令微调生成式大语言模型的知识图谱补全方法(ISWC2024)
笔记整理:刘治强,浙江大学硕士生,研究方向为知识图谱表示学习,大语言模型 论文链接:http://arxiv.org/abs/2407.16127 发表会议:ISWC 2024 1. 动机 传统的知识图谱补全(KGC)模型通过…...

鸿蒙中用HarmonyOS SDK应用服务 HarmonyOS5开发一个生活电费的缴纳和查询小程序
一、项目初始化与配置 1. 创建项目 ohpm init harmony/utility-payment-app 2. 配置权限 // module.json5 {"requestPermissions": [{"name": "ohos.permission.INTERNET"},{"name": "ohos.permission.GET_NETWORK_INFO"…...

工业自动化时代的精准装配革新:迁移科技3D视觉系统如何重塑机器人定位装配
AI3D视觉的工业赋能者 迁移科技成立于2017年,作为行业领先的3D工业相机及视觉系统供应商,累计完成数亿元融资。其核心技术覆盖硬件设计、算法优化及软件集成,通过稳定、易用、高回报的AI3D视觉系统,为汽车、新能源、金属制造等行…...

初学 pytest 记录
安装 pip install pytest用例可以是函数也可以是类中的方法 def test_func():print()class TestAdd: # def __init__(self): 在 pytest 中不可以使用__init__方法 # self.cc 12345 pytest.mark.api def test_str(self):res add(1, 2)assert res 12def test_int(self):r…...
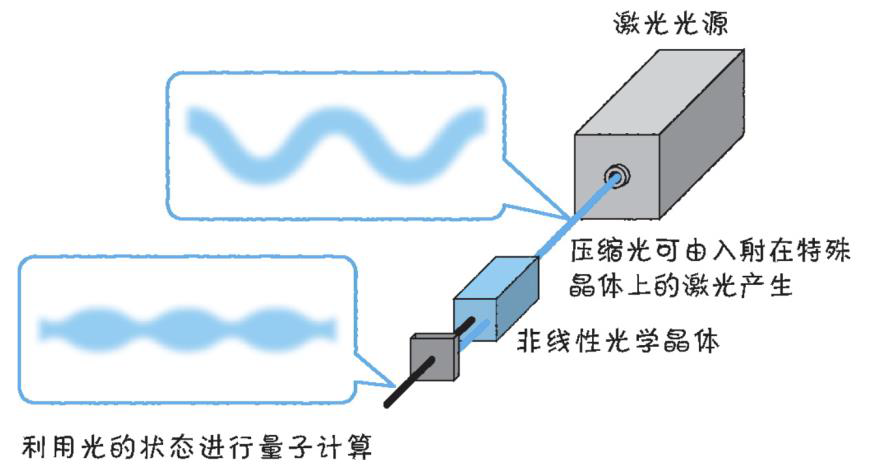
以光量子为例,详解量子获取方式
光量子技术获取量子比特可在室温下进行。该方式有望通过与名为硅光子学(silicon photonics)的光波导(optical waveguide)芯片制造技术和光纤等光通信技术相结合来实现量子计算机。量子力学中,光既是波又是粒子。光子本…...

C#中的CLR属性、依赖属性与附加属性
CLR属性的主要特征 封装性: 隐藏字段的实现细节 提供对字段的受控访问 访问控制: 可单独设置get/set访问器的可见性 可创建只读或只写属性 计算属性: 可以在getter中执行计算逻辑 不需要直接对应一个字段 验证逻辑: 可以…...

Go语言多线程问题
打印零与奇偶数(leetcode 1116) 方法1:使用互斥锁和条件变量 package mainimport ("fmt""sync" )type ZeroEvenOdd struct {n intzeroMutex sync.MutexevenMutex sync.MutexoddMutex sync.Mutexcurrent int…...