【PnP】详细公式推导,使用DLT直接线性变换法求解相机外参
文章目录
- 🚀PnP
- 1️⃣ 求解不考虑尺度的解
- 2️⃣ 恢复解的尺度
- 3️⃣ 另一种解法
🚀PnP
PnP(Perspective-n-Point)是求解3D到2D点相机外参的算法。PnP算法有DLT直接线性变换、P3P三对点估计位姿、EPnP(Efficient PnP)、BA(Bundle Adjustment)光速法平差。这里主要讲解DLT。

推理过程涉及一些知识点,可以参考以下博文:
【对比学习】正交阵/酉矩阵,对称矩阵/Hermite矩阵,正交相似对角化/奇异值分解的内在联系
【相机标定】相机标定中的坐标变换,内外参求解,畸变校正,标定代码
输入:
空间中3D点的坐标、图像中2D点的坐标,内参矩阵
输出:
相机外参
1️⃣ 求解不考虑尺度的解
写出矩阵变换方程:
Z C [ u v 1 ] = K 3 × 3 [ R T ] 3 × 4 [ X W Y W Z W 1 ] Z_C\begin{bmatrix}u\\v\\1\end{bmatrix}=K_{3\times3}\begin{bmatrix}R&T\end{bmatrix}_{3\times4}\begin{bmatrix}X_W\\Y_W\\Z_W\\1\end{bmatrix} ZC uv1 =K3×3[RT]3×4 XWYWZW1
将内外参数展开:
Z C [ u v 1 ] = [ F x 0 u 0 0 F y v 0 0 0 1 ] [ f 11 f 12 f 13 f 14 f 21 f 22 f 23 f 24 f 31 f 32 f 33 f 34 ] [ X W Y W Z W 1 ] = [ F x f 11 + u 0 f 31 F x f 12 + u 0 f 32 F x f 13 + u 0 f 33 F x f 14 + u 0 f 34 F y f 21 + v 0 f 31 F y f 22 + v 0 f 32 F y f 23 + v 0 f 33 F y f 24 + v 0 f 34 f 31 f 32 f 33 f 34 ] [ X W Y W Z W 1 ] Z_C\begin{bmatrix}u\\v\\1\end{bmatrix}= \begin{bmatrix} F_x&0&u_0\\0&F_y&v_0\\0&0&1 \end{bmatrix} \begin{bmatrix}f_{11}&f_{12}&f_{13}&f_{14}\\f_{21}&f_{22}&f_{23}&f_{24}\\f_{31}&f_{32}&f_{33}&f_{34}\end{bmatrix}\begin{bmatrix}X_W\\Y_W\\Z_W\\1\end{bmatrix}\\= \begin{bmatrix} F_xf_{11}+u_0f_{31}&F_xf_{12}+u_0f_{32}&F_xf_{13}+u_0f_{33}&F_xf_{14}+u_0f_{34}\\ F_yf_{21}+v_0f_{31}&F_yf_{22}+v_0f_{32}&F_yf_{23}+v_0f_{33}&F_yf_{24}+v_0f_{34}\\ f_{31}&f_{32}&f_{33}&f_{34} \end{bmatrix}\begin{bmatrix}X_W\\Y_W\\Z_W\\1\end{bmatrix} ZC uv1 = Fx000Fy0u0v01 f11f21f31f12f22f32f13f23f33f14f24f34 XWYWZW1 = Fxf11+u0f31Fyf21+v0f31f31Fxf12+u0f32Fyf22+v0f32f32Fxf13+u0f33Fyf23+v0f33f33Fxf14+u0f34Fyf24+v0f34f34 XWYWZW1
进一步展开,写成方程组的形式:
{ Z C u = F x X W f 11 + u 0 X W f 31 + F x Y W f 12 + u 0 Y W f 32 + F x Z W f 13 + u 0 Z W f 33 + F x f 14 + u 0 f 34 Z C v = F y X W f 21 + v 0 X W f 31 + F y Y W f 22 + v 0 Y W f 32 + F y Z W f 23 + v 0 Z W f 33 + F y f 24 + v 0 f 34 Z C = f 31 X W + f 32 Y W + f 33 Z W + f 34 \begin{cases} Z_Cu=F_xX_Wf_{11}+u_0X_Wf_{31}+F_xY_Wf_{12}+u_0Y_Wf_{32}+F_xZ_Wf_{13}+u_0Z_Wf_{33}+F_xf_{14}+u_0f_{34}\\ Z_Cv=F_yX_Wf_{21}+v_0X_Wf_{31}+F_yY_Wf_{22}+v_0Y_Wf_{32}+F_yZ_Wf_{23}+v_0Z_Wf_{33}+F_yf_{24}+v_0f_{34}\\ Z_C=f_{31}X_W+f_{32}Y_W+f_{33}Z_W+f_{34} \end{cases} ⎩ ⎨ ⎧ZCu=FxXWf11+u0XWf31+FxYWf12+u0YWf32+FxZWf13+u0ZWf33+Fxf14+u0f34ZCv=FyXWf21+v0XWf31+FyYWf22+v0YWf32+FyZWf23+v0ZWf33+Fyf24+v0f34ZC=f31XW+f32YW+f33ZW+f34
把最后一个方程带入前两个有:
{ F x X W f 11 + F x Y W f 12 + F x Z W f 13 + F x f 14 + ( u 0 − u ) X W f 31 + ( u 0 − u ) Y W f 32 + ( u 0 − u ) Z W f 33 + ( u 0 − u ) f 34 = 0 F y X W f 21 + F y Y W f 22 + F y Z W f 23 + F y f 24 + ( v 0 − v ) X W f 31 + ( v 0 − v ) Y W f 32 + ( v 0 − v ) Z W f 33 + ( v 0 − v ) f 34 = 0 \begin{cases} F_xX_Wf_{11}+F_xY_Wf_{12}+F_xZ_Wf_{13}+F_xf_{14}+(u_0-u)X_Wf_{31}+(u_0-u)Y_Wf_{32}+(u_0-u)Z_Wf_{33}+(u_0-u)f_{34}=0\\ F_yX_Wf_{21}+F_yY_Wf_{22}+F_yZ_Wf_{23}+F_yf_{24}+(v_0-v)X_Wf_{31}+(v_0-v)Y_Wf_{32}+(v_0-v)Z_Wf_{33}+(v_0-v)f_{34}=0 \end{cases} {FxXWf11+FxYWf12+FxZWf13+Fxf14+(u0−u)XWf31+(u0−u)YWf32+(u0−u)ZWf33+(u0−u)f34=0FyXWf21+FyYWf22+FyZWf23+Fyf24+(v0−v)XWf31+(v0−v)YWf32+(v0−v)ZWf33+(v0−v)f34=0
也就是说每一组3D-2D的匹配点就能对应两个方程,其中共有12个未知数(或者说11个未知数+1个尺度参数),则至少需要6组匹配点来解出所有未知数。
设有n组匹配点,则:
[ F x X 1 F x Y 1 F x Z 1 F x 0 0 0 0 ( u 0 − u ) X 1 ( u 0 − u ) Y 1 ( u 0 − u ) Z 1 u 0 − u 0 0 0 0 F y X 1 F y Y 1 F y Z 1 F y ( u 0 − u ) X 1 ( v 0 − v ) Y 1 ( v 0 − v ) Z 1 v 0 − v … … … … … … … … … … … … F x X n F x Y n F x Z n F x 0 0 0 0 ( u 0 − u ) X n ( u 0 − u ) Y n ( u 0 − u ) Z n u 0 − u 0 0 0 0 F y X n F y Y n F y Z n F y ( u 0 − u ) X n ( v 0 − v ) Y n ( v 0 − v ) Z n v 0 − v ] [ f 11 f 12 f 13 f 14 f 21 f 22 f 23 f 24 f 31 f 32 f 33 f 34 ] = 0 \begin{bmatrix} F_xX_1&F_xY_1&F_xZ_1&F_x&0&0&0&0&(u_0-u)X_1&(u_0-u)Y_1&(u_0-u)Z_1&u_0-u\\ 0&0&0&0&F_yX_1&F_yY_1&F_yZ_1&F_y&(u_0-u)X_1&(v_0-v)Y_1&(v_0-v)Z_1&v_0-v\\ \dots&\dots&\dots&\dots&\dots&\dots&\dots&\dots&\dots&\dots&\dots&\dots\\ F_xX_n&F_xY_n&F_xZ_n&F_x&0&0&0&0&(u_0-u)X_n&(u_0-u)Y_n&(u_0-u)Z_n&u_0-u\\ 0&0&0&0&F_yX_n&F_yY_n&F_yZ_n&F_y&(u_0-u)X_n&(v_0-v)Y_n&(v_0-v)Z_n&v_0-v\\ \end{bmatrix} \begin{bmatrix} f_{11}\\f_{12}\\f_{13}\\f_{14}\\f_{21}\\f_{22}\\f_{23}\\f_{24}\\f_{31}\\f_{32}\\f_{33}\\f_{34}\\ \end{bmatrix}=\mathbf{0} FxX10…FxXn0FxY10…FxYn0FxZ10…FxZn0Fx0…Fx00FyX1…0FyXn0FyY1…0FyYn0FyZ1…0FyZn0Fy…0Fy(u0−u)X1(u0−u)X1…(u0−u)Xn(u0−u)Xn(u0−u)Y1(v0−v)Y1…(u0−u)Yn(v0−v)Yn(u0−u)Z1(v0−v)Z1…(u0−u)Zn(v0−v)Znu0−uv0−v…u0−uv0−v f11f12f13f14f21f22f23f24f31f32f33f34 =0
将上式写作:
A 2 n × 12 F 12 × 1 = 0 A_{2n\times 12}F_{12\times1}=\mathbf{0} A2n×12F12×1=0
若有6组点对,则可以得到唯一解。
🌔但常常匹配点大于6组,此时构造如下优化目标和约束条件(等于是强行规定一个尺度,后续再把尺度补偿回来):
{ min ∥ A F ∥ 2 s . t . ∥ F ∥ 2 = 1 \begin{cases} \min\parallel AF\parallel_2\\ s.t.\;\parallel F\parallel_2=1 \end{cases} {min∥AF∥2s.t.∥F∥2=1
此时,对 A A A进行SVD分解有:
min ∥ ( U Σ V T ) F ∥ 2 \min\parallel(U\Sigma V^T)F\parallel_2 min∥(UΣVT)F∥2
由酉矩阵的范数保持性有:
min ∥ Σ V T F ∥ 2 \min\parallel\Sigma V^TF\parallel_2 min∥ΣVTF∥2
令 Y = V T F Y=V^TF Y=VTF,此时由于酉矩阵的范数保持性, ∥ Y ∥ 2 = 1 \parallel Y\parallel_2=1 ∥Y∥2=1,从而有:
min ∥ Σ Y ∥ 2 \min\parallel\Sigma Y\parallel_2 min∥ΣY∥2
由于 Σ \Sigma Σ的奇异值从大到小排列,所以解为:
Y = [ 0 0 … 1 ] T Y=\begin{bmatrix}0&0&\dots&1\end{bmatrix}^T Y=[00…1]T
由 Y = V T F Y=V^TF Y=VTF,且 V V V为实数矩阵,有:
F = ( V T ) − 1 Y = ( V T ) ∗ Y = V Y = V ( : e n d ) F=(V^T)^{-1}Y=(V^T)^{*}Y=VY= V(:end) F=(VT)−1Y=(VT)∗Y=VY=V(:end)
即解 F F F为 V V V的最后一列,这里不妨令这个不含尺度的解为 F ^ \hat F F^,而实际解为:
F = β F ^ F=\beta\hat F F=βF^
其中 β \beta β是接下来要求解的尺度因子。
2️⃣ 恢复解的尺度
我们利用旋转变换的标准正交性来恢复尺度,由 F ^ \hat F F^有:
R ^ = [ f ^ 11 f ^ 12 f ^ 13 f ^ 21 f ^ 22 f ^ 23 f ^ 31 f ^ 32 f ^ 33 ] \hat R=\begin{bmatrix}\hat f_{11}&\hat f_{12}&\hat f_{13}\\\hat f_{21}&\hat f_{22}&\hat f_{23}\\\hat f_{31}&\hat f_{32}&\hat f_{33}\end{bmatrix} R^= f^11f^21f^31f^12f^22f^32f^13f^23f^33
对其进行SVD分解有:
U ^ Σ ^ V ^ T = S V D ( R ^ ) \hat U\hat \Sigma \hat V^T=SVD(\hat R) U^Σ^V^T=SVD(R^)
⭐这里,严格数学推导比较复杂,这里简单理解为真正的 ∥ R ∥ = 1 \parallel R\parallel=1 ∥R∥=1,且为正交阵,而 ∥ R ^ ∥ ≠ 1 \parallel\hat R\parallel\neq1 ∥R^∥=1,把缩放变换 Σ ^ \hat \Sigma Σ^拿掉使之恢复为两酉矩阵的乘积,使得其模为1,把这个结果作为最优解。

则带有尺度的最优解为:
R = ± U ^ V ^ T R=\pm\hat U\hat V^T R=±U^V^T
而尺度因子可以用 Σ \Sigma Σ各个奇异值的平均值来估计:
β = ± 1 t r ( Σ ^ ) / 3 \beta=\pm\frac{1}{tr(\hat \Sigma)/3} β=±tr(Σ^)/31
考虑到3D点在相机的前方:
Z C > 0 ⇒ β ( f ^ 31 X W + f ^ 32 Y W + f ^ 33 Z W + f ^ 34 ) > 0 Z_C>0\Rightarrow\beta(\hat f_{31}X_W+\hat f_{32}Y_W+\hat f_{33}Z_W+\hat f_{34})>0 ZC>0⇒β(f^31XW+f^32YW+f^33ZW+f^34)>0
由此可以确定 R R R和 β \beta β的符号,进而可以求得恢复尺度的平移向量:
T = β [ f ^ 14 f ^ 24 f ^ 34 ] T T=\beta\begin{bmatrix}\hat f_{14}&\hat f_{24}&\hat f_{34}\end{bmatrix}^T T=β[f^14f^24f^34]T
😄综上,有:
{ R = ± U ^ V ^ T T = β [ f ^ 14 f ^ 24 f ^ 34 ] T β = ± 1 t r ( Σ ^ ) / 3 β ( f ^ 31 X W + f ^ 32 Y W + f ^ 33 Z W + f ^ 34 ) > 0 \begin{cases} R=\pm \hat U\hat V^T\\ T=\beta\begin{bmatrix}\hat f_{14}&\hat f_{24}&\hat f_{34}\end{bmatrix}^T\\ \beta=\pm\frac{1}{tr(\hat \Sigma)/3}\\ \beta(\hat f_{31}X_W+\hat f_{32}Y_W+\hat f_{33}Z_W+\hat f_{34})>0 \end{cases} ⎩ ⎨ ⎧R=±U^V^TT=β[f^14f^24f^34]Tβ=±tr(Σ^)/31β(f^31XW+f^32YW+f^33ZW+f^34)>0
3️⃣ 另一种解法
⭐上述过程已经可以把理论上的外参求解出来了。
🐦这里提供另一种在实际工程中计算精度会更高的重投影迭代优化求解的思路,以飨读者。
输入:
空间中3D点的坐标、图像中2D点的坐标
输出:
相机外参,相机内参(我们认为相机内参也是随时间稍微变化的)
求解迭代初值:
我们令内外参的乘积为 M M M:
M = K 3 × 3 [ R T ] 3 × 4 M=K_{3\times3}\begin{bmatrix}R&T\end{bmatrix}_{3\times4} M=K3×3[RT]3×4
😃与上述求解不考虑尺度的 F F F类似,我们可以将 M 3 × 4 M_{3\times4} M3×4的整体数值求解出来(不考虑尺度)。
我们进一步将 M M M写成如下形式:
M = [ K 3 × 3 R 3 × 3 K 3 × 3 T 3 × 1 ] M=\begin{bmatrix} K_{3\times3}R_{3\times3}&K_{3\times3}T_{3\times1} \end{bmatrix} M=[K3×3R3×3K3×3T3×1]
① {\color{#E16B8C}{①}} ①首先,对 K 3 × 3 R 3 × 3 K_{3\times3}R_{3\times3} K3×3R3×3进行QR分解,得到一个正交阵 q q q(认定为旋转矩阵 R R R)和上三角矩阵 r r r(认定为内参 K K K):
q r = Q R ( K 3 × 3 R 3 × 3 ) = R K qr=QR(K_{3\times3}R_{3\times3})=RK qr=QR(K3×3R3×3)=RK
② {\color{#E16B8C}{②}} ②接着,将 K K K代入 K 3 × 3 T 3 × 1 K_{3\times3}T_{3\times1} K3×3T3×1,求解出位移向量 T T T。
优化迭代:
添加新的匹配点,构造优化目标(重新投影逼近真值)如下:
arg min K , R , T ∑ i 1 2 ∣ ∣ 1 Z C M X i − u i ∣ ∣ 2 \displaystyle \argmin_{K,R,T}\sum_i\frac{1}{2}||\frac{1}{Z_C}MX_{i}-u_i||^2 K,R,Targmini∑21∣∣ZC1MXi−ui∣∣2
① {\color{#E16B8C}{①}} ①利用负梯度迭代法(对构成 M M M的 K , R , T K,R,T K,R,T求梯度)求解即可。
② {\color{#E16B8C}{②}} ②其中,迭代初值指定为由无尺度 M M M求出的 K , R , T K,R,T K,R,T。
③ {\color{#E16B8C}{③}} ③ Z C Z_C ZC也是变化的,可以由每步迭代的 Z C = M 31 X W + M 32 Y W + M 33 Z W + M 34 Z_C=M_{31}X_W+M_{32}Y_W+M_{33}Z_W+M_{34} ZC=M31XW+M32YW+M33ZW+M34计算得出。
😸另外,整体上也可以把整个 M M M作为变量求梯度优化,最后再利用QR分解等技巧求出 K , R , T K,R,T K,R,T,究竟选择哪种主要是看数据的表示方式和计算开销。
相关文章:
【PnP】详细公式推导,使用DLT直接线性变换法求解相机外参
文章目录 🚀PnP1️⃣ 求解不考虑尺度的解2️⃣ 恢复解的尺度3️⃣ 另一种解法 🚀PnP PnP(Perspective-n-Point)是求解3D到2D点相机外参的算法。PnP算法有DLT直接线性变换、P3P三对点估计位姿、EPnP(Efficient PnP)、BA(Bundle Adjustment)光速法平差。这…...
怎样把书上的事件图改编成活动图-《分析模式》漫谈43
DDD领域驱动设计批评文集 做强化自测题获得“软件方法建模师”称号 《软件方法》各章合集 《分析模式》中模型图的UML改编,之前也有人做过,Martin Fowler网站上给出了部分改编成果。 这些改编成果只覆盖了部分章节,而且只是把类型图&#…...

CodeFormer——基于代码本查找变换器的鲁棒盲人脸修复翻译
文章目录 原文翻译摘要1 Introduction2 Related Work3 Methodology3.1 Codebook Learning (Stage I)3.2 Codebook Lookup Transformer Learning (Stage II)3.3 Controllable Feature Transformation (Stage III) 4 Experiments4.1 Datasets4.2 Experimental Settings and Metri…...

监控场景下,视频SDK的应用策略
在当今数字化、智能化的时代背景下,音视频技术的快速发展正深刻改变着各行各业。特别是在监控领域,音视频SDK的应用不仅极大地提升了监控系统的性能与效率,还推动了监控技术的智能化转型。 一、音视频SDK 音视频SDK是一套集成了音视频编解码…...

前端面试必备!HTML 超实用考点全解析
在前端开发的广阔领域中,面试是检验开发者能力的关键环节。而 HTML 作为前端开发的基础,在面试中常常占据重要地位。无论是初入前端领域的新人,还是经验丰富的开发者,都可能在 HTML 的相关问题上遭遇挑战。今天,就让我…...

自动驾驶系统研发系列—避免事故的利器:AEB自动紧急制动系统详解
🌟🌟 欢迎来到我的技术小筑,一个专为技术探索者打造的交流空间。在这里,我们不仅分享代码的智慧,还探讨技术的深度与广度。无论您是资深开发者还是技术新手,这里都有一片属于您的天空。让我们在知识的海洋中一起航行,共同成长,探索技术的无限可能。 🚀 探索专栏:学…...

zabbix 6.0 监控clickhouse(单机)
zabbix 6.0 LTS已经包含了clickhouse的监控模板,所以我们可以直接使用自带的模板来监控clickhouse了。 0.前置条件 clickhouse 已经安装,我安装的是24.3.5.47zabbix-agent 已经安装并配置。系统是ubuntu 2204 server 1. 新建监控用户 使用xml的方式为…...

Redis的RDB执行原理
文章目录 引入‘页表’的概念Copy-On-WriteRDB快照 引入‘页表’的概念 Linux里面每个进程都是无法直接操作物理内存的,每个进程只能用页表映射本进程的虚拟内存到物理内存的映射。 bgsave的时候,主进程会fork(复制)一个子进程&am…...
速度背!24下软考网工“经典100道母题来了”!
2024下软考已经迫在眉睫了,准备考下半年软考多媒体应用设计师的小伙伴们准备得怎么样了? 单单只啃书肯定不太够,今天给大家整理了多媒体100道经典题, 这些都是历年高频考点整理,包含24下软考80%以上考点,跟…...
、深度纹理(DepthTexture)、视频纹理(VideoTexture))
three.js 纹理(Texture)、深度纹理(DepthTexture)、视频纹理(VideoTexture)
纹理(Texture) 创建一个纹理贴图,将其应用到一个表面,或者作为反射/折射贴图。 构造函数 Texture( image, mapping, wrapS, wrapT, magFilter, minFilter, format, type, anisotropy, encoding ) // load a texture, set wrap…...

广东自闭症全托机构:提供高质量的康复服务
在广东这片充满活力的土地上,自闭症儿童的康复需求日益受到社会各界的关注。在众多自闭症全托机构中,位于广州的星贝育园自闭症儿童寄宿制学校以其专业的团队、全面的服务体系以及显著的康复成效,成为了众多家庭的信赖之选。 星贝育园&#…...

Nodejs安装配置及创建vue项目
文章目录 Node简介Node官网安装node.js验证是否安装成功 npm简介配置node远程拉取仓库安装cnpm(国内插件管理命令)npm相关参数解读 vue简介创建vue项目 Node 简介 Node.js 是一个免费、开源、跨平台的 JavaScript 运行时环境,它让开发人员能…...

浅析正交投影矩阵和透视投影矩阵的推导
先上矩阵的内容。在opengl中,分别通过glOrtho函数和glFrustum函数得到正交投影矩阵和透视投影矩阵。 glOrtho 函数描述生成正交投影矩阵。 (左、 下、 近) 和 (右、 上、 近) 参数分别指定近剪裁平面上映射到窗口左下角和右上角的点,假定眼睛位于 (0、0…...

python四舍五入保留两位小数不足补0
在 Python 中,当你想要对数字进行四舍五入并保留两位小数,同时确保当小数位数不足两位时能够补零,你可以继续使用 round() 函数进行四舍五入,然后在格式化输出时使用字符串格式化方法来确保小数位数。 round() 函数本身只会返回四…...

Mybatis-15.动态SQL-if
一.动态SQL 比如只想查询名字中带‘张’的,其他的都不进行条件筛查 会发现什么也查询不出来 我们希望SQL语句能够根据我们所输入的查询值进行动态的变化,就需要使用到动态SQL。动态SQL中有很多标签,其中用于条件判断的就是标签<if>。…...

gb28181-sip注册流程
gb28181-sip注册流程 当客户端第一次接入时,客户端将持续向Server端发送REGISTER消息,直到Server端回复"200 OK"后结束 它的注册流程如下图: 注册流程: 1 . SIP代理向SIP服务器发送Register请求: 第1行表…...

WEBRTC教程:局域网怎么调试,http://172.19.18.101:8080 ,无法访问摄像头和麦克风,请检查权限
在局域网中使用 WebRTC 时,无法访问摄像头和麦克风通常是因为浏览器的安全策略限制了 getUserMedia API 的使用。如果你在非 localhost 或非 HTTPS 环境下访问网页,浏览器会阻止访问摄像头和麦克风。 解决方案 在局域网中调试 WebRTC 时,你…...

Apache POI—读写Office格式文件
Apache POI 是一个开源的 Java 库,用于读写 Microsoft Office 格式的文件,主要包括 Excel、Word 和 PowerPoint 等文档。POI 对 Excel 文件的支持最为完善,通过 POI 可以方便地进行 Excel 文件的创建、编辑、读取等操作。 1. Apache POI 简介…...

3162. 优质数对的总数 I
3162. 优质数对的总数 I 题目链接:3162. 优质数对的总数 I 代码如下: class Solution { public:int numberOfPairs(vector<int>& nums1, vector<int>& nums2, int k){int res 0;for (int i 0; i < nums1.size(); i){for (int…...
(五)Web前端开发进阶2——AJAX
目录 2.Axios库 3.认识URL 4.Axios常用请求方法 5.HTTP协议——请求报文/响应报文 6.前后端分离开发 7.Element组件库 1.Ajax概述 AJAX 是异步的 JavaScript和XML(Asynchronous JavaScript And XML)。简单点说,就是使用XMLHttpRequest 对象与服务器通信。它可…...

Linux应用开发之网络套接字编程(实例篇)
服务端与客户端单连接 服务端代码 #include <sys/socket.h> #include <sys/types.h> #include <netinet/in.h> #include <stdio.h> #include <stdlib.h> #include <string.h> #include <arpa/inet.h> #include <pthread.h> …...
7.4.分块查找
一.分块查找的算法思想: 1.实例: 以上述图片的顺序表为例, 该顺序表的数据元素从整体来看是乱序的,但如果把这些数据元素分成一块一块的小区间, 第一个区间[0,1]索引上的数据元素都是小于等于10的, 第二…...
【JVM】- 内存结构
引言 JVM:Java Virtual Machine 定义:Java虚拟机,Java二进制字节码的运行环境好处: 一次编写,到处运行自动内存管理,垃圾回收的功能数组下标越界检查(会抛异常,不会覆盖到其他代码…...

【论文笔记】若干矿井粉尘检测算法概述
总的来说,传统机器学习、传统机器学习与深度学习的结合、LSTM等算法所需要的数据集来源于矿井传感器测量的粉尘浓度,通过建立回归模型来预测未来矿井的粉尘浓度。传统机器学习算法性能易受数据中极端值的影响。YOLO等计算机视觉算法所需要的数据集来源于…...
微服务商城-商品微服务
数据表 CREATE TABLE product (id bigint(20) UNSIGNED NOT NULL AUTO_INCREMENT COMMENT 商品id,cateid smallint(6) UNSIGNED NOT NULL DEFAULT 0 COMMENT 类别Id,name varchar(100) NOT NULL DEFAULT COMMENT 商品名称,subtitle varchar(200) NOT NULL DEFAULT COMMENT 商…...
)
相机Camera日志分析之三十一:高通Camx HAL十种流程基础分析关键字汇总(后续持续更新中)
【关注我,后续持续新增专题博文,谢谢!!!】 上一篇我们讲了:有对最普通的场景进行各个日志注释讲解,但相机场景太多,日志差异也巨大。后面将展示各种场景下的日志。 通过notepad++打开场景下的日志,通过下列分类关键字搜索,即可清晰的分析不同场景的相机运行流程差异…...
MySQL 8.0 OCP 英文题库解析(十三)
Oracle 为庆祝 MySQL 30 周年,截止到 2025.07.31 之前。所有人均可以免费考取原价245美元的MySQL OCP 认证。 从今天开始,将英文题库免费公布出来,并进行解析,帮助大家在一个月之内轻松通过OCP认证。 本期公布试题111~120 试题1…...

成都鼎讯硬核科技!雷达目标与干扰模拟器,以卓越性能制胜电磁频谱战
在现代战争中,电磁频谱已成为继陆、海、空、天之后的 “第五维战场”,雷达作为电磁频谱领域的关键装备,其干扰与抗干扰能力的较量,直接影响着战争的胜负走向。由成都鼎讯科技匠心打造的雷达目标与干扰模拟器,凭借数字射…...
Android 之 kotlin 语言学习笔记三(Kotlin-Java 互操作)
参考官方文档:https://developer.android.google.cn/kotlin/interop?hlzh-cn 一、Java(供 Kotlin 使用) 1、不得使用硬关键字 不要使用 Kotlin 的任何硬关键字作为方法的名称 或字段。允许使用 Kotlin 的软关键字、修饰符关键字和特殊标识…...
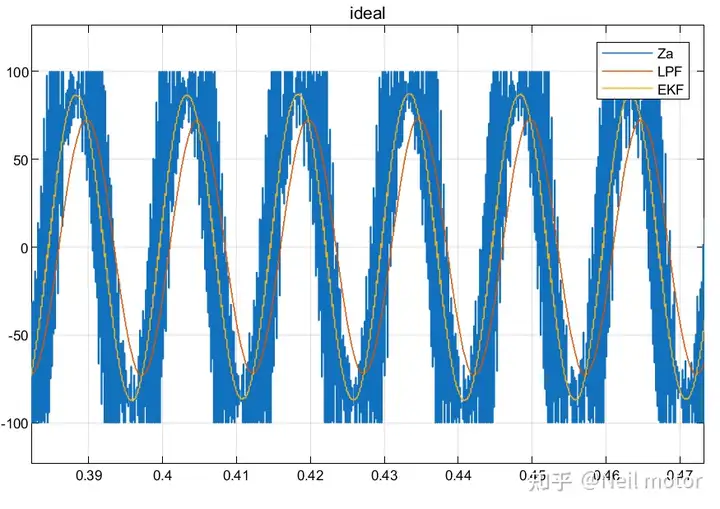
永磁同步电机无速度算法--基于卡尔曼滤波器的滑模观测器
一、原理介绍 传统滑模观测器采用如下结构: 传统SMO中LPF会带来相位延迟和幅值衰减,并且需要额外的相位补偿。 采用扩展卡尔曼滤波器代替常用低通滤波器(LPF),可以去除高次谐波,并且不用相位补偿就可以获得一个误差较小的转子位…...