基于多视点编码光场的全景三维重建方法
欢迎关注GZH《光场视觉》
摘要:在基于光场的一系列应用中,目标的三维重建是基础且关键的任务。普通光场只能重建单一视角而无法重建全景,并且在纹理特征匮乏的区域也无法生成准确的三维信息。针对以上问题,提出一种基于多视点编码光场的全景三维重建方法。首先,利用结构光编码向场景投射正弦模板生成像素级的相位码字以丰富场景特征,进而在多个角度独立地进行光场采集。然后,在各个光场采样视点的内部利用空间信息和角度信息求取深度值。最后,在不同的光场采样点之间由位姿引导实现三维信息融合。实验结果表明,所提方法能有效恢复物体的全景信息,而且对物体纹理特征匮乏区域的重建也更加准确。
关键词:图像处理;三维重建;光场;结构光;相位编码;点云
1引言
三维重建是计算机视觉中的一项重要任务,广泛应用于虚拟现实技术[1]、无人驾驶[2]、机器人视觉导航[3]等领域。基于多视图匹配的三维重建技术如structurefrommotion(SFM)[4]和simultaneouslocalizationandmapping(SLAM)[5]已经被用于大规模场景的稀疏重建。此类方法通过特征点匹配计算特征点的空间坐标,进而重建出物体的三维模型。然而它们面临着两方面不足:1)场景中的特征点分布稀疏,导致重建的三维模型也十分稀疏,无法描述几何细节;2)特征点的匹配计算复杂,制约三维重建的速度。
四维光场(LF)[6]同时记录光线的强度和方向,其数据高维度的优点催生了大量应用;并且随着Lytro和Raytrix等便携式光场摄像机的普及,基于光场的三维重建方法被陆续提出。光场根据数字重聚焦中的最佳剪切值[7]或极平面图像(EPI)中的最优斜率[8-9]来获取场景深度。Tao等[10]综合度量散焦线索和相关性线索两种代价获取深度值。Williem等[11]综合度量约束角熵代价和约束自适应离焦代价获取深度值。Peng等[12]认为在同一视点不同视图中的深度图包含互补信息,并提出融合不同视图实现目标重建的方法。此类方法通过精确的深度值估计实现物体重建,但深度线索依赖光场的空间和角度信息,只能在单一视角重建目标,无法恢复目标完整的全景三维信息。
全景三维重建需要从不同的视角获得场景的几何信息再进行融合,常见的方法有360°重建和720°重建。360°重建中,视点沿水平环形布置,720°重建则同时沿着水平和垂直方向环形布局。这一类方法利用场景几何与光场结构之间的关系计算位姿[13]或者利用高精度的采集设备获取位姿[14],并由位姿引导实现立体匹配。Chen等[15]使用双边一致性度量进行可靠的光场立体匹配。Zhang等[16]在此基础上提出P-SFM,结合立体匹配技术和光场光束平差技术计算光场相机位姿和场景几何形状。Vianello等[14]利用高精度采集设备获取360°环形光场,利用Hough变换计算环形EPI获取单视点深度并使用采样过程中得到的位姿实现信息融合。宋征玺等[17]在此基础上构建三维霍夫空间提取空间点轨迹实现重建。此类方法可以实现物体的全景三维重建,然而深度计算和位姿估计均依赖于表面纹理,可靠性相对较差。因此通常需要较多的数据,利用数据冗余来提高三维重建的可靠性。
针对以上问题,本文提出一种基于多视点编码光场融合的全景三维重建方法。使用光场相机环绕物体进行采样,利用光场内部的高维数据独立获取各个视点的深度值,进而将不同视点的深度值转换为点云并在全局坐标空间中融合,实现物体的全景重建。同时,在普通光场的基础上引入相位编码光场以丰富场景特征,从而提高深度值质量。所提方法具有以下优点:1)采用编码光场的相位编码代替自然场景,解决弱纹理或无纹理区域由于缺乏特征导致的深度估计不准确问题。2)采用多视点融合策略,解决普通光场只能实现单视角重建的问题,实现全景重建。同时在采样过程中获取单视点精确位姿,消除位姿计算导致的视点间匹配不准确问题。3)采用沿水平和垂直方向进行环形布局的信息采集方法,在获取物体全景信息的同时减少视点采集数。
2多视点三维重建算法
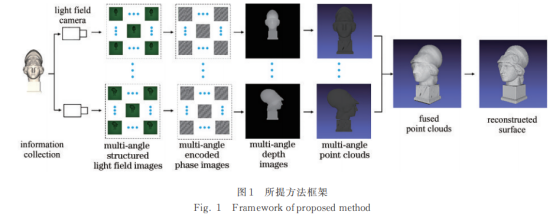
所提基于多视点编码光场的精确三维全景重建方法的总体框架如图1(a)所示,采用结构光编码技术赋予场景像素级码字特征,使用光场相机获取不同视点的编码光场,然后独立计算不同视点的深度值,最后将不同视点的信息在三维坐标空间中融合。相对于已有的三维重建方案,所提框架具有以下特点:1)在深度值估计阶段,采用一种符合结构光特性的重聚焦方法,在提高深度值精度的同时降低复杂度;2)在视点融合阶段,使用采样中的位姿进行点云融合,避免重新计算位姿引起的误差;3)提出一种基于统计的飞行像素去除方法,优化重建目标在深度不连续区域的精度。
2.1相位编码光场的获取
在各个视点采用相位编码光场进行深度值估计,采用多步相移法进行像素级编码,在减小量化误差的同时产生准确连续的码字。具体来说,使用N张同时受水平和垂直坐标调制的正弦函数模板,其中,第i张模板被定义为
![]()
式中:A表示振幅;(s,t)表示像素的坐标;T表示正弦函数周期。这些图像由光场相机采集,通过N步相移法获得包裹相位:
包裹相位φ(x,y)通过arctan函数求出,相位值分布在(-π,π)中,并在水平和竖直方向上周期性循环。通过多步相移法得到的图像,像素值在其邻域内连续且唯一。
2.2改进的重聚焦算法
通过第2.1节得到编码光场后,使用重聚焦算法进行深度估计。对于编码光场,通过四维剪切对其进行重聚焦

式中:φ表示光场图像;α表示剪切值;φα表示重聚焦之后的光场图像;(u,v)和(s,t)表示角度坐标与空间坐标。当重聚焦图像聚焦于一个特定深度值时,聚焦平面上的点所处角块的强度一致,成像最为清晰;而聚焦平面以外的散焦点则变得模糊。剪切值α反映场景的深度值,通过代价函数Cost(φα)评估深度线索,代价最小的α对应最佳深度值。
![]()
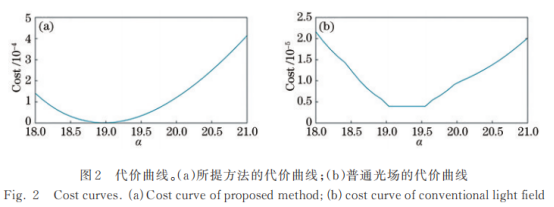
传统光场的代价曲线如图2(b)所示,受均匀纹理、复杂光照和遮挡等因素影响,场景的强度值相似或相同,代价函数出现多个最小值使α无法唯一地收敛,导致深度值估计不准确。针对上述问题,对传统重聚焦算法在光场采集和代价计算两方面进行改进,充分利用编码光场特性,在减小计算量的同时提升深度估计的精度。
在光场重采样阶段,传统数字重聚焦的精度受光场低分辨率的制约,采样像素在多个的剪切值下均保持相同。当剪切值为α0和α1时,最邻近的采样像素均为(s0,t1),产生量化误差降低视差的精度,如图3(a)所示。为解决这个问题,采用双线性插值法重新计算亚像素相位值,如图3(b)所示,将剪切值α采样下的亚像素相位值记为

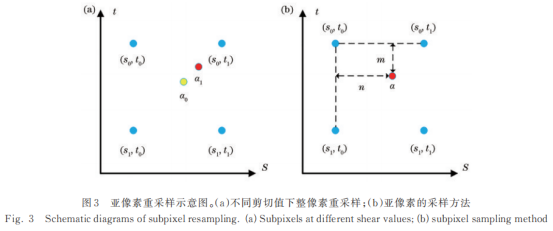
式中:φα(s,t)表示空间坐标(s,t)处的相位值;n和m为亚像素与其左上方整像素点间的水平和垂直距离。普通光场使用强度作为编码信息,像素间不具有连续性,使用插值法破坏了图像的空间结构;编码光场的像素在水平和垂直方向均连续,基于双线性插值的亚像素采样方法充分利用这一特性,在不破坏光场空间结构的同时提升数字重聚焦的采样精度。
得到重采样的相位后,数字重聚焦通过代价最小化计算深度值。Tao等[10]将散焦线索和相关性线索作为代价计算场景深度。当α重新聚焦到正确的深度时,相关性线索要求光场图像中所有与(s,t)对应的像素构成一个具有最小方差的角块,同时散焦线索要求该角块的像素值与中心视图相应的像素值的差异最小。根据Cai等[18]的研究,相位编码光场对散焦线索不敏感而对相关性线索敏感。因此仅使用相关性线索定义代价函数:
式中:N表示光场的角度分辨率;φα(s,t,u,v)表示剪切值α下采样像素的相位值。仅使用相关性线索定义代价函数,在保持光场深度估计准确性的同时减小了运算量,加快了运算速度,如式(4)所示,通过计算求取最小化代价Cost(φα)的剪切值α,进一步通过文献[10]中的方法即可得到场景的深度值。
2.3多视点三维信息融合
为实现物体全景三维重建,在相位编码重聚焦求得单视点深度图的基础上,还需要融合多视点的三维信息。对测量目标在多个水平和垂直的视点进行采样得到不同视点信息,使用数字重聚焦计算各视点的深度图,将各视点深度图中的像素投射到三维坐标空间,并使用位姿匹配实现信息融合。
对于任意一张深度图,通过下式将像素(s,t)转换为空间坐标(x,y,z)进而转换为点云:
式中:z0表示像素(s,t)处的深度值;f表示相机的焦距;d表示焦点与旋转中心的距离;(s0,t0)表示深度图中心像素的坐标;dx和dy表示单一像素点在水平和竖直方向上的物理尺寸;P表示单视点的点云;∪表示空间坐标的集合;Npix表示深度图像素个数。
图4(a)中,将物体首次采样的视点作为参考系,沿水平和垂直两个方向进行采样。将采样过程中水平和垂直方向的旋转角度定义为θ1、θ2,则水平和垂直视点的位姿为
式中:Hθ表示水平视点的位姿;Vθ表示垂直视点的位姿。
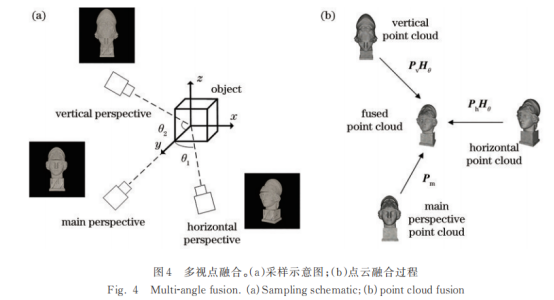
在实际应用中,由于光场相机的旋转角度θ1难以测量,通常固定光场相机并使用步进电机控制的高精度旋转台对物体进行指定角度的旋转[17]实现水平视点采集。由于水平方向进行360°采集已经覆盖了目标的大部分区域,垂直方向的视点只需覆盖顶部和底部,即θ2为90°和270°两个特殊视点即可。
在获得不同视角点云位姿后,通过下式将多视点的点云融合,如图4(b)所示:
![]()
式中:Pv表示垂直视点的点云;Ph表示水平视点的点云;Pm表示主视点的点云;∪表示单视点下点云的集合;P表示融合后的点云。
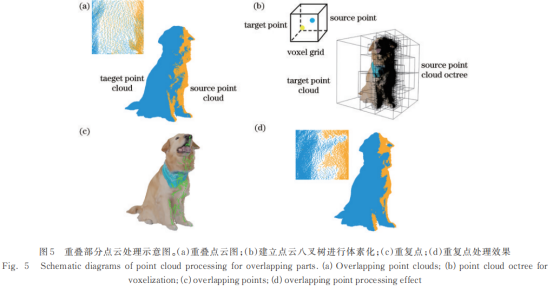
在多视点点云融合过程中,不同视点的点云存在重叠部分,如图5(a)所示。这些点被视为物体表面的重复采样点,使点云重叠区域的密度大于单视点点云密度,给物体重建带来了误差。使用一种基于体素的重复点云处理方法来解决此问题,如图5(b)所示,对于源点云,建立其对应的八叉树,并将目标点云和源点云中存在于同一体素的点定义为重叠点。此时两个点云的重复点在同一体素中,使用体素下采样或者Laplace平滑[19]均可有效融合重复点云。处理后的点云,重叠区域和不重叠区域的密度保持一致,提升了重建物体的质量。
2.4飞行像素移除
为进一步提升三维重建质量,提高点云在深度不连续区域的精度,提出一种基于统计式的离群点移除策略消除飞行像素。飞行像素的产生原理如图6(a)所示,像素p3同时记录来自多条路径的光,当像素看到前景物体的边缘和非遮挡的背景物体时,采集的强度/颜色将是前景和背景强度/颜色的混合。飞行像素被视为错误的采样点,从而带来了误差。
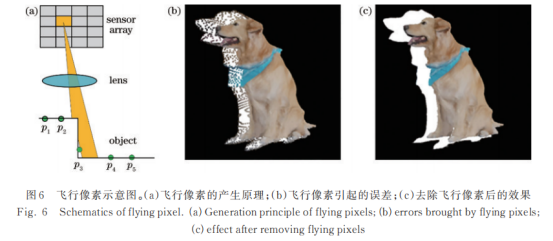
飞行像素的强度是前景和背景的加权和,将深度图转换为点云后,飞行像素点与其他点的距离往往更远。利用这一特性,提出一种统计式离群点移除策略,这些点满足

式中:(xp,yp,zp)表示为离点p最近k个点的空间坐标;δ为所设的阈值。式(13)可以有效寻找所有与邻域的其他点距离较大的点,通过调整适合的阈值δ索引飞行像素点并移除。具体效果如图6(c)所示,该方法计算量小,且在去除离群点的同时提升了物体的边缘质量。
3.实验结果与分析
3.1实验设置
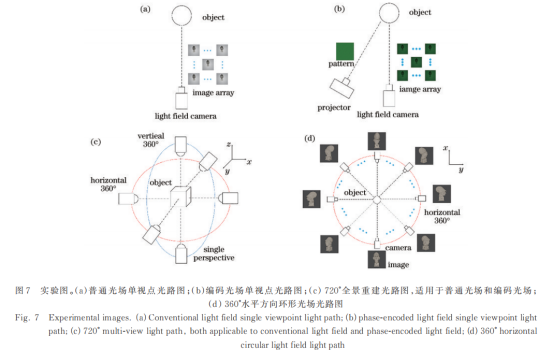
将所提算法与3种三维重建算法进行对比,分别为普通光场三维重建[10]、clusteringviewsformulti-viewstereo(CMVS)[20]、multi-viewstereo(MVS)[21]。相应地,构建了3种数据,具体的测试方法和对应的实验数据如表1所示。1)针对CMVS和MVS,构建水平360°环形光场,如图7(d)所示,相机环绕旋转轴1°等间隔均匀采样以获取场景的360°信息,一个数据集包含360张普通纹理图像。2)针对纹理光场的三维重建[10],构建720°普通光场,如图7(c)所示,该数据包含6个视点,在水平和垂直方向分别构成360°环形采集,每个视点为图7(a)所示的普通光场采集的纹理信息。光场相机焦距为43.456mm,每个视点包含7×7共49张图像,整个数据集包含294张视图。3)针对所提编码光场的三维重建,构建720°编码光场,其采样方式仍如图7(c)所示,但各视点为图7(b)所示的编码光场[22]。其光场相机参数和普通光场相同,模板使用正弦函数的周期为42,整个数据集包含294张视图。
值得注意的是,CMVS和MVS需要密集的采样视点建立视点间相关性,当视点间距大时无法进行匹配,故使用图7(c)所示的采样方法无法得到重建结果。根据Vianello等[14]和宋征玺等[17]的研究,使用图7(d)所示的环形光场并采用1°间隔采样时可取得可接受的重建效果,此时需360张采样图像,已经高于普通光场和编码光场294张视图的数据量。为在尽可能接近的数据规模上比较性能,对环形光场仅进行水平360°重建。

3.2与现有方法的精度比较
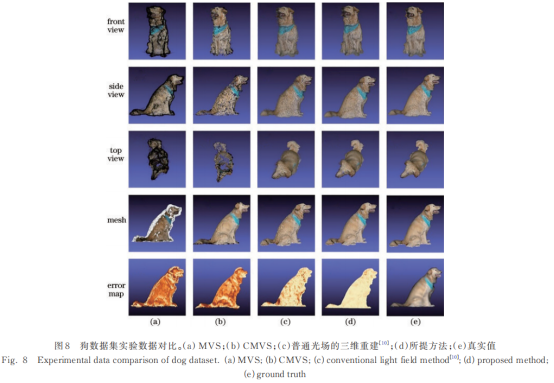
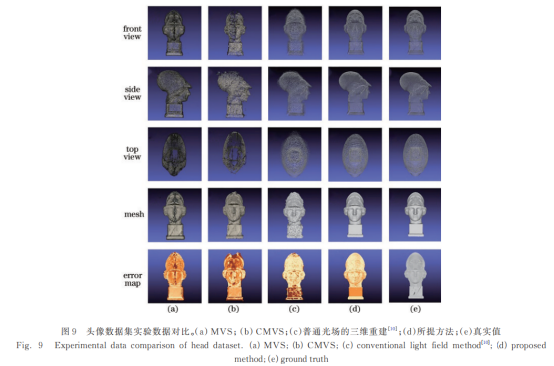
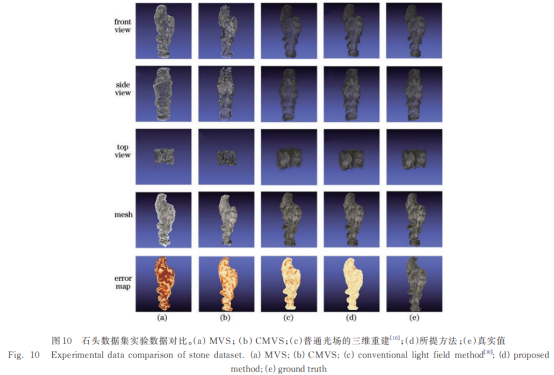
从表1可以看出,采用4种方法在3组数据集上测试重建效果及生成mesh的误差,结果如图8~10所示,其中,误差图颜色越深代表误差越大。MVS和CMVS在环形光场数据集的实验结果如图8~10(a)、(b)所示,可见MVS重建结果在边缘处具有较多噪声,而CMVS重建点云密度较稀疏。使用泊松表面重建[23]将点云重建为网格后,所得到的重建结果误差较大。同时,使用环形光场数据集进行三维重建会丢失顶部和底部信息,只能完成水平360°重建。传统光场三维重建方法和所提方法的测试结果如图8~10(c)、(d)所示,结果表明,通过不同视点求取深度值再进行融合,所得重建效果整体优于CMVS和MVS,利用更少的输入图像生成了更精确的三维信息。同时从图8~10(c)可以看出,普通光场数据集难以对弱纹理或无纹理区域进行有效重建,而从图8~10(d)可以看出,使用编码光场可以得到更好的点云,网格的重建结果也更加平滑和准确,实现了精确的全景三维重建。
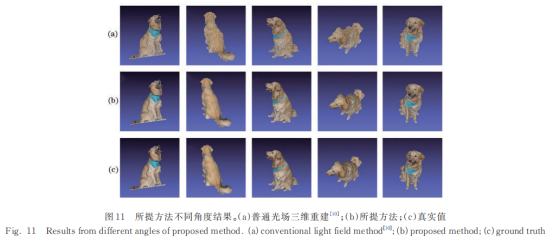
为更好呈现全景三维重建效果,选取5个随机角度对生成的网格与真实值进行对比,结果如图11所示,所提方法可以获取物体的全景信息并融合,在各个角度均能观测到物体的三维信息。
3.3光场角度分辨率对结果的影响
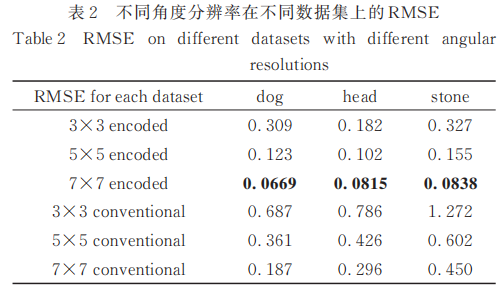
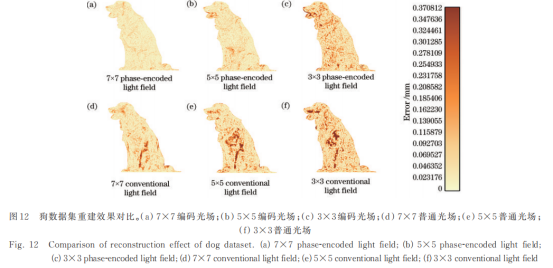
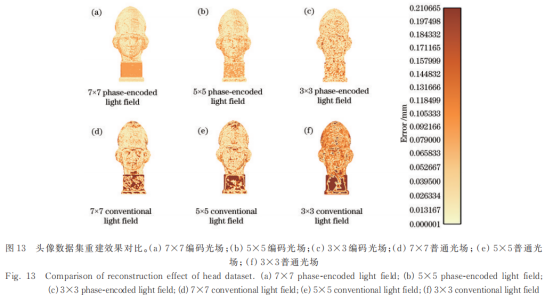
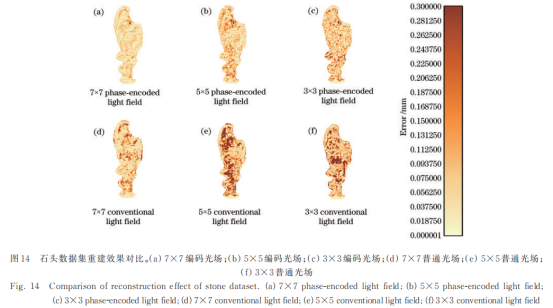
为分析编码光场的角度分辨率对结果的影响,即重建质量随输入数据量的变化,测试角度分辨率为3×3、5×5、7×7的普通光场与编码光场所得点云的均方根误差(RMSE)[24],结果如表2所示。从表2可以看出,随着单视点光场采样角度分辨率的增加,普通光场和编码光场的RMSE不断减小,表明视点数目的增加提供了更强的约束,从而生成更准确的三维信息。同时,在相同角度分辨率的情况下,编码光场得到的点云质量优于普通光场,即光编码提供了更准确的深度线索,生成了更准确的深度值。
除了客观指标,还比较了重建mesh和真实值的误差,结果如图12~14所示。从图中可以看出:输入光场的角度分辨率改变时,普通算法受角度分辨率的影响更大;而所提算法在输入不同尺度的光场情况下,均能得到完整的信息和精确的轮廓。此外,其结果也表明所提算法的mesh质量优于普通算法,重建结果更加准确且平滑,从而验证了其有效性。
3.4重建精度影响因素分析
还探索了具体实施中不同因素对重建精度的影响,主要包括输入图片空间分辨率、旋转角精度及模板的噪声。重建误差以RMSE衡量,结果如表3所示,重建mesh的误差如图15所示。输入图像的空间分辨率影响深度值的精确性,进而影响重建结果,测试并分析了在输入分辨率为512×512、448×448、384×384时的重建效果。随着空间分辨率降低,视差和深度值精度降低,生成点云的误差增大。视点的旋转角θ1和θ2将影响点云的融合,进而降低重建质量,测试并分析了旋转角出现1°~5°误差时的重建效果。随着角度误差的增加,重建结果的误差也迅速增大。模板噪声降低深度值的准确性,降低重建质量,对相位模板加入方差为0.01、0.05、0.1的高斯噪声并测试重建效果。随着噪声增强,重建结果的RMSE略微增加。
4 结论
针对传统光场重建信息不全,在纹理匮乏和重复区域重建结果不精确等问题,提出一种基于多视点的编码光场三维重建的方法。通过相位解码、深度估计、多视点融合、飞行像素去除等一系列步骤进行优化,实现了物体的精确全景重建。实验结果表明,与现有方法相比,该方法可以在更少的输入情况下得到更加精确的重建结果,同时其在弱纹理或无纹理处重建的结果更加平滑。同时,还分析了角度分辨率、空间分辨率、模板噪声等因素对重建质量的影响。
文章来源:激光与光电子学进展 第60卷第12期
文章作者:王泽宇,向森,邓慧萍,吴谨
相关链接:http://www.opticsjournal.net/Articles/OJ46b4470ef4ff0194/Abstract
声明:转载此文目的在于传递更多信息,仅供读者学习、交流之目的。文章版权归原作者所有,如有侵权,请联系删除。
相关文章:
基于多视点编码光场的全景三维重建方法
欢迎关注GZH《光场视觉》 摘要:在基于光场的一系列应用中,目标的三维重建是基础且关键的任务。普通光场只能重建单一视角而无法重建全景,并且在纹理特征匮乏的区域也无法生成准确的三维信息。针对以上问题,提出一种基于多视点编码…...

Spring Boot中的分布式文件系统
Spring Boot中的分布式文件系统 大家好,我是免费搭建查券返利机器人省钱赚佣金就用微赚淘客系统3.0的小编,也是冬天不穿秋裤,天冷也要风度的程序猿!今天,我们将探讨如何在Spring Boot中实现分布式文件系统的搭建和应用…...
three.js地理坐标系有哪些,和屏幕坐标系的转换。
坐标系很好理解,就是点线面体的位置,一个点是一个坐标,一条线段2个坐标,一个矩形四个坐标,一个立方体8个坐标,three.js面对的是三维空间,屏幕则是二维的,这就面临着转换问题…...

聊聊C++20的三向比较运算符 `<=>`
C20标准引入了许多新特性,其中之一是三向比较运算符 <>,也被称为太空船运算符。这个新运算符为C程序员提供了一种全新的比较对象的方式,它能有效简化比较逻辑,避免编写多个比较运算符重载的情况。 为什么需要三向比较运算符…...
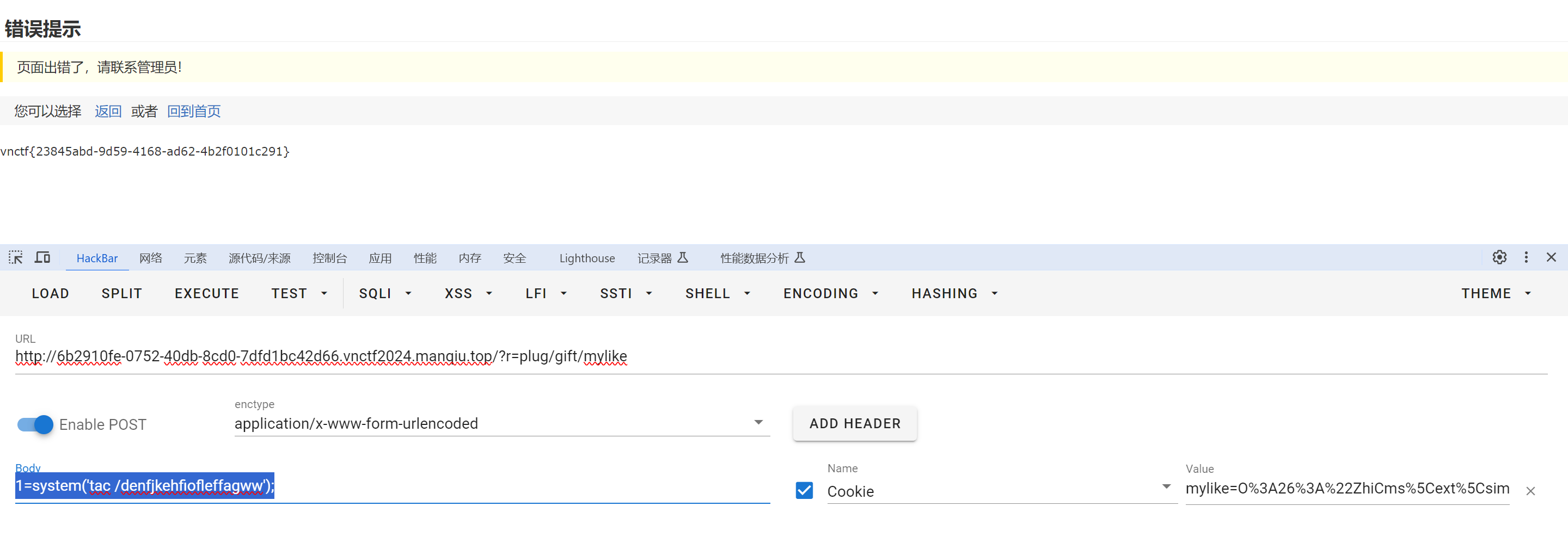
CVE-2024-0603 漏洞复现
CVE-2024-0603 源码:https://gitee.com/dazensun/zhicms 开题: CVE-2024-0603描述:ZhiCms up to 4.0版本的文件app/plug/controller/giftcontroller.php中存在一处未知漏洞。攻击者可以通过篡改参数mylike触发反序列化,从而远程…...
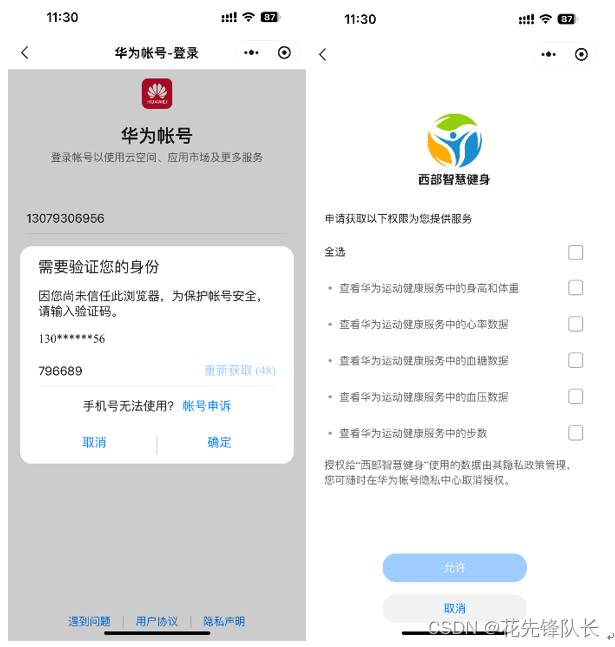
西部智慧健身小程序+华为运动健康服务
1、 应用介绍 西部智慧健身小程序为用户提供一站式全流程科学健身综合服务。用户通过登录微信小程序,可享用健康筛查、运动风险评估、体质检测评估、运动处方推送、个人运动数据监控与评估等公益服务。 2、 体验介绍西部智慧健身小程序华为运动健康服务核心体验如…...

Spring Boot中如何处理异步任务
Spring Boot中如何处理异步任务 大家好,我是免费搭建查券返利机器人省钱赚佣金就用微赚淘客系统3.0的小编,也是冬天不穿秋裤,天冷也要风度的程序猿!今天我们将探讨在Spring Boot应用中如何处理异步任务,以提升系统的性…...
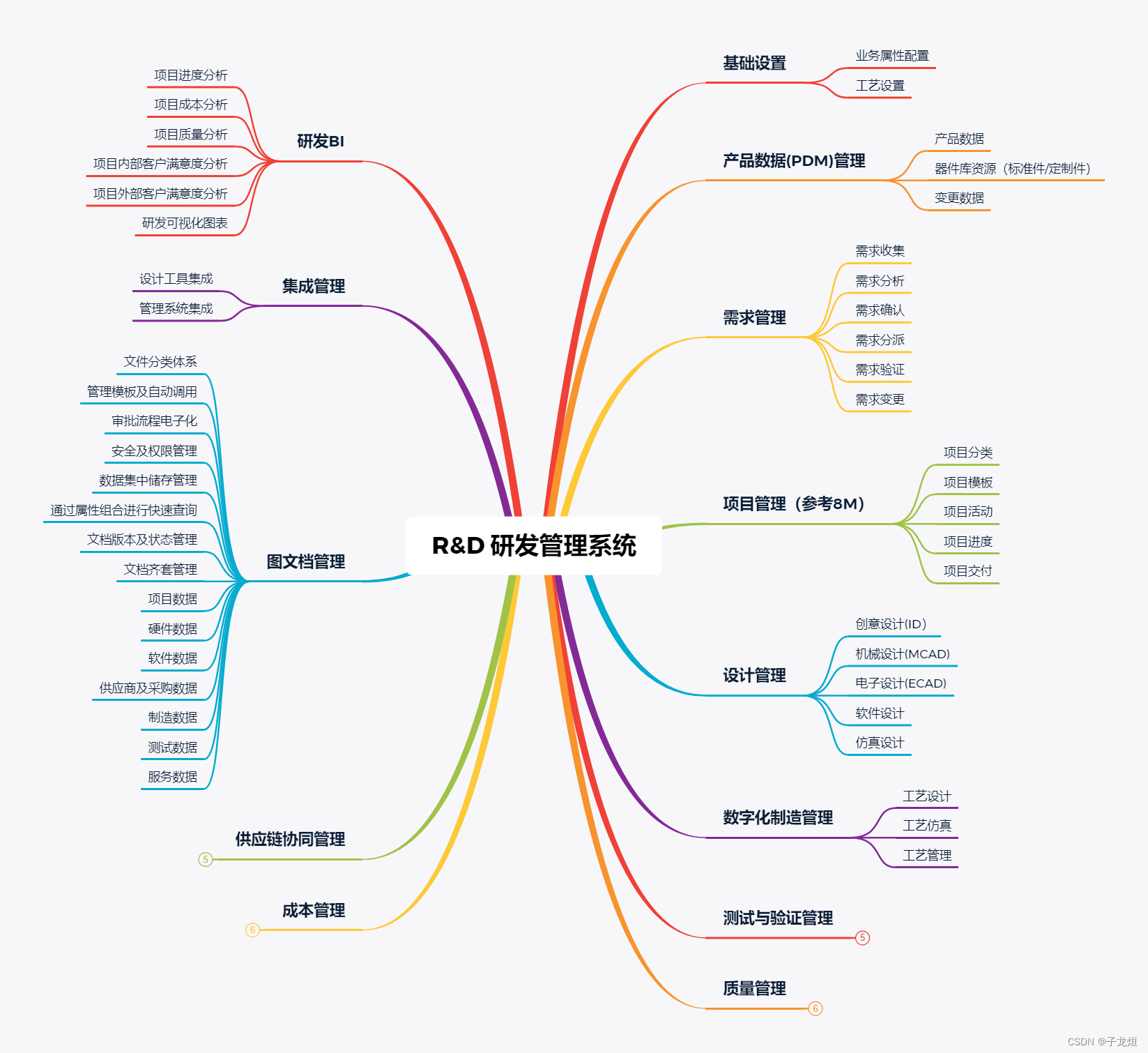
数字化精益生产系统--RD研发管理系统
R&D研发管理系统是一种用于管理和监督科学研究和技术开发的软件系统,其设计和应用旨在提高企业研发活动的效率、质量和速度。以下是对R&D研发管理系统的功能设计:...

鱼眼相机 去畸变
目录 枕形畸变和去枕形畸变 去枕形畸变失败 枕形畸变和去枕形畸变 import cv2 import numpy as np import matplotlib.pyplot as plt# 创建一个带网格的原始图像 def create_grid(image_size512, grid_size20):image np.zeros((image_size, image_size, 3), dtypenp.uint8)…...

DC/AC电源模块:为智能家居设备提供恒定的电力供应
BOSHIDA DC/AC电源模块:为智能家居设备提供恒定的电力供应 DC/AC电源模块是一种常见的电源转换器,它将直流电源(DC)转换为交流电源(AC),为智能家居设备提供恒定的电力供应。在智能家居系统中&a…...
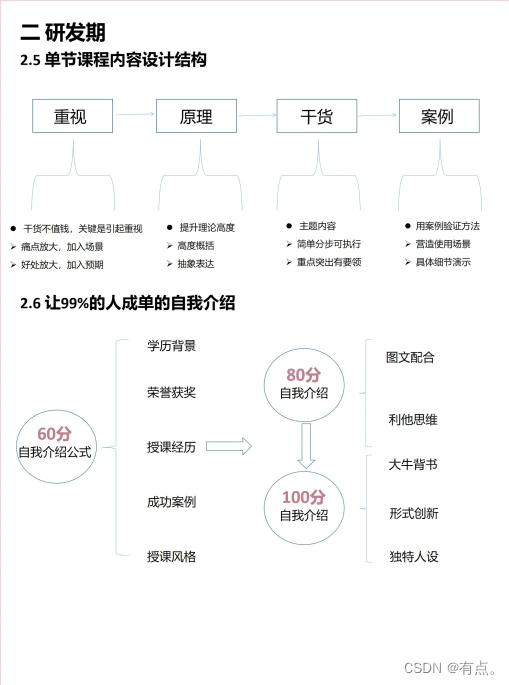
小红书运营教程02
小红书大致会分享10篇左右。微博、抖音、以及视频剪辑等自媒体运营相关技能以及运营教程相关会陆续的进行分享。 上次分享涉及到的对比,母婴系列,或者可以说是服装类型,不需要自己过多的投入,对比知识类博主来说,自己将知识讲述出来,然后要以此账号进行变现就比较麻烦,…...

k8s自动清理节点服务
要在 Kubernetes 中实现当某个节点的 CPU 或内存使用超过 90% 时清理该节点上的服务,你可以使用以下几种方法: 自定义脚本和 cron job:编写一个脚本监控节点的资源使用情况,并在超过阈值时触发清理操作。使用 DaemonSet 运行监控…...

JS如何把年月日转为时间戳
在JavaScript中,将年月日(通常表示为一个字符串或者分别的年、月、日数字)转换为时间戳(即Unix时间戳,是自1970年1月1日(UTC/GMT的午夜)开始所经过的秒数,不考虑闰秒)可以…...
【YOLOv5进阶】——引入注意力机制-以SE为例
声明:笔记是做项目时根据B站博主视频学习时自己编写,请勿随意转载! 一、站在巨人的肩膀上 SE模块即Squeeze-and-Excitation 模块,这是一种常用于卷积神经网络中的注意力机制!! 借鉴代码的代码链接如下&a…...
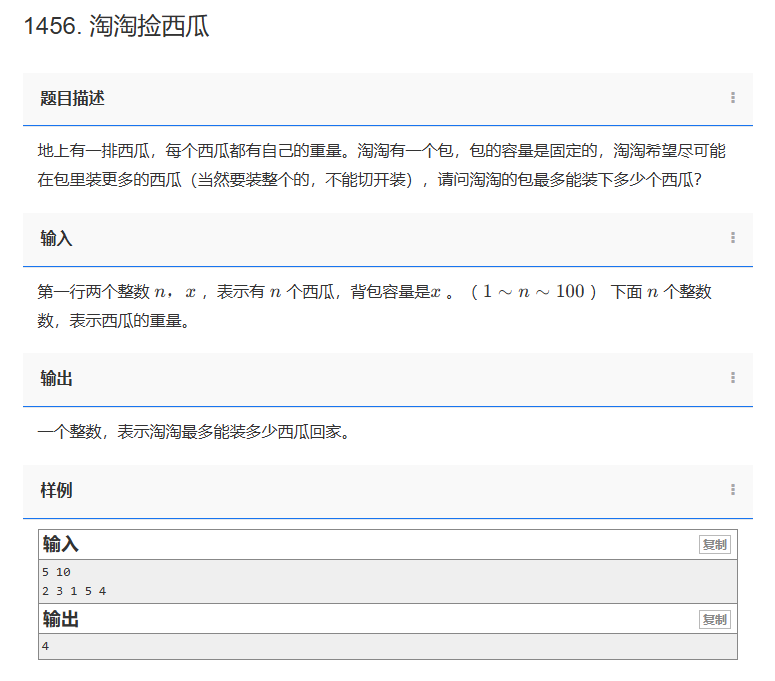
【C++题解】1456. 淘淘捡西瓜
问题:1456. 淘淘捡西瓜 类型:贪心 题目描述: 地上有一排西瓜,每个西瓜都有自己的重量。淘淘有一个包,包的容量是固定的,淘淘希望尽可能在包里装更多的西瓜(当然要装整个的,不能切开…...

用Python读取Word文件并提取标题
前言 在日常工作中,我们经常需要处理Word文档,特别是从中提取关键信息,如标题、段落等。今天,我们将利用Python来实现这一功能,并为大家提供一段完整的代码示例。 准备工作 首先,你需要安装python-docx库…...
Windows编程上
Windows编程[上] 一、Windows API1.控制台大小设置1.1 GetStdHandle1.2 SetConsoleWindowInfo1.3 SetConsoleScreenBufferSize1.4 SetConsoleTitle1.5 封装为Innks 2.控制台字体设置以及光标调整2.1 GetConsoleCursorInfo2.2 SetConsoleCursorPosition2.3 GetCurrentConsoleFon…...

BiTCN-Attention一键实现回归预测+8张图+特征可视化图!注意力全家桶再更新!
声明:文章是从本人公众号中复制而来,因此,想最新最快了解各类智能优化算法及其改进的朋友,可关注我的公众号:强盛机器学习,不定期会有很多免费代码分享~ 目录 原理简介 数据介绍 结果展示 全家桶代码目…...
)
zoom缩放问题(关于ElementPlus、Echarts、Vue3draggable等组件偏移问题)
做了一个项目下来,由于整体界面偏大,采取了缩放90%,导致很多组件出现偏移问题,以下我会把我遇到的各种组件偏移问题依次进行描述解答: ElementPlus选择器下拉偏移 <template><el-select :teleported"f…...
【后端面试题】【中间件】【NoSQL】MongoDB的配置服务器、复制机制、写入语义和面试准备
MongoDB的配置服务器 引入了分片机制之后,MongoDB启用了配置服务器(config server) 来存储元数据,这些元数据包括分片信息、权限控制信息,用来控制分布式锁。其中分片信息还会被负责执行查询mongos使用。 MongoDB的配置服务器有一个很大的优…...

多模态2025:技术路线“神仙打架”,视频生成冲上云霄
文|魏琳华 编|王一粟 一场大会,聚集了中国多模态大模型的“半壁江山”。 智源大会2025为期两天的论坛中,汇集了学界、创业公司和大厂等三方的热门选手,关于多模态的集中讨论达到了前所未有的热度。其中,…...
黑马Mybatis
Mybatis 表现层:页面展示 业务层:逻辑处理 持久层:持久数据化保存 在这里插入图片描述 Mybatis快速入门 
3.3.1_1 检错编码(奇偶校验码)
从这节课开始,我们会探讨数据链路层的差错控制功能,差错控制功能的主要目标是要发现并且解决一个帧内部的位错误,我们需要使用特殊的编码技术去发现帧内部的位错误,当我们发现位错误之后,通常来说有两种解决方案。第一…...

vue3 定时器-定义全局方法 vue+ts
1.创建ts文件 路径:src/utils/timer.ts 完整代码: import { onUnmounted } from vuetype TimerCallback (...args: any[]) > voidexport function useGlobalTimer() {const timers: Map<number, NodeJS.Timeout> new Map()// 创建定时器con…...

优选算法第十二讲:队列 + 宽搜 优先级队列
优选算法第十二讲:队列 宽搜 && 优先级队列 1.N叉树的层序遍历2.二叉树的锯齿型层序遍历3.二叉树最大宽度4.在每个树行中找最大值5.优先级队列 -- 最后一块石头的重量6.数据流中的第K大元素7.前K个高频单词8.数据流的中位数 1.N叉树的层序遍历 2.二叉树的锯…...
协议转换利器,profinet转ethercat网关的两大派系,各有千秋
随着工业以太网的发展,其高效、便捷、协议开放、易于冗余等诸多优点,被越来越多的工业现场所采用。西门子SIMATIC S7-1200/1500系列PLC集成有Profinet接口,具有实时性、开放性,使用TCP/IP和IT标准,符合基于工业以太网的…...

第22节 Node.js JXcore 打包
Node.js是一个开放源代码、跨平台的、用于服务器端和网络应用的运行环境。 JXcore是一个支持多线程的 Node.js 发行版本,基本不需要对你现有的代码做任何改动就可以直接线程安全地以多线程运行。 本文主要介绍JXcore的打包功能。 JXcore 安装 下载JXcore安装包&a…...
虚拟机网络不通的问题(这里以win10的问题为主,模式NAT)
当我们网关配置好了,DNS也配置好了,最后在虚拟机里还是无法访问百度的网址。 第一种情况: 我们先考虑一下,网关的IP是否和虚拟机编辑器里的IP一样不,如果不一样需要更改一下,因为我们访问百度需要从物理机…...

[学习笔记]使用git rebase做分支差异化同步
在一个.NET 项目中,使用了Volo.Abp库,但出于某种原因,需要源码调试,因此,使用源码方式集成的项目做了一个分支archive-abp-source 其中引用方式变更操作的提交为:7de53907 后续,在master分支中…...
C# winform教程(二)----button
一、button的使用方法 主要使用方法几乎都在属性内,我们操作也在这个界面 二、作用 用户点击时触发事件,事件有很多种,可以根据需要选择。 三、常用属性 虽然属性很多,但是常用的并不多 3.常用属性 名称内容含义AutoSize自动调…...