yolov8obb角度预测原理解析
预测头
ultralytics/nn/modules/head.py
class OBB(Detect):"""YOLOv8 OBB detection head for detection with rotation models."""def __init__(self, nc=80, ne=1, ch=()):"""Initialize OBB with number of classes `nc` and layer channels `ch`."""super().__init__(nc, ch)self.ne = ne # number of extra parametersc4 = max(ch[0] // 4, self.ne)self.cv4 = nn.ModuleList(nn.Sequential(Conv(x, c4, 3), Conv(c4, c4, 3), nn.Conv2d(c4, self.ne, 1)) for x in ch)def forward(self, x):"""Concatenates and returns predicted bounding boxes and class probabilities."""bs = x[0].shape[0] # batch sizeangle = torch.cat([self.cv4[i](x[i]).view(bs, self.ne, -1) for i in range(self.nl)], 2) # OBB theta logits# NOTE: set `angle` as an attribute so that `decode_bboxes` could use it.angle = (angle.sigmoid() - 0.25) * math.pi # [-pi/4, 3pi/4]# angle = angle.sigmoid() * math.pi / 2 # [0, pi/2]if not self.training:self.angle = anglex = Detect.forward(self, x)if self.training:return x, angle# return torch.cat([x, angle], 1) if self.export else (torch.cat([x[0], angle], 1), (x[1], angle))return torch.cat([x, angle], 1).permute(0, 2, 1) if self.export else (torch.cat([x[0], angle], 1), (x[1], angle))
forward 输入值
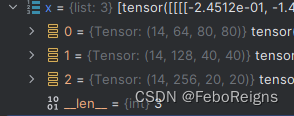
self.cv4网路结构
ModuleList((0): Sequential((0): Conv((conv): Conv2d(64, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn): BatchNorm2d(16, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)(act): SiLU(inplace=True))(1): Conv((conv): Conv2d(16, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn): BatchNorm2d(16, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)(act): SiLU(inplace=True))(2): Conv2d(16, 1, kernel_size=(1, 1), stride=(1, 1)))(1): Sequential((0): Conv((conv): Conv2d(128, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn): BatchNorm2d(16, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)(act): SiLU(inplace=True))(1): Conv((conv): Conv2d(16, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn): BatchNorm2d(16, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)(act): SiLU(inplace=True))(2): Conv2d(16, 1, kernel_size=(1, 1), stride=(1, 1)))(2): Sequential((0): Conv((conv): Conv2d(256, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn): BatchNorm2d(16, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)(act): SiLU(inplace=True))(1): Conv((conv): Conv2d(16, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn): BatchNorm2d(16, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)(act): SiLU(inplace=True))(2): Conv2d(16, 1, kernel_size=(1, 1), stride=(1, 1)))
angle维度14,1,8400
损失函数
pred_angle = pred_angle.permute(0, 2, 1).contiguous()
维度变为14 8400 1
将预测结果转为bboxes
pred_bboxes = self.bbox_decode(anchor_points, pred_distri, pred_angle) # xyxy, (b, h*w, 4)
计算回归损失
loss[0], loss[2] = self.bbox_loss(pred_distri, pred_bboxes, anchor_points, target_bboxes, target_scores, target_scores_sum, fg_mask)
这里的bbox_loss指的是:
self.bbox_loss = RotatedBboxLoss(self.reg_max - 1, use_dfl=self.use_dfl).to(self.device)
接来下看RotatedBboxLoss
def forward(self, pred_dist, pred_bboxes, anchor_points, target_bboxes, target_scores, target_scores_sum, fg_mask):"""IoU loss."""weight = target_scores.sum(-1)[fg_mask].unsqueeze(-1)iou = probiou(pred_bboxes[fg_mask], target_bboxes[fg_mask])loss_iou = ((1.0 - iou) * weight).sum() / target_scores_sum# DFL lossif self.use_dfl:target_ltrb = bbox2dist(anchor_points, xywh2xyxy(target_bboxes[..., :4]), self.reg_max)loss_dfl = self._df_loss(pred_dist[fg_mask].view(-1, self.reg_max + 1), target_ltrb[fg_mask]) * weightloss_dfl = loss_dfl.sum() / target_scores_sumelse:loss_dfl = torch.tensor(0.0).to(pred_dist.device)return loss_iou, loss_dfl
两个旋转矩形如何计算IOU:
def probiou(obb1, obb2, CIoU=False, eps=1e-7):"""Calculate the prob IoU between oriented bounding boxes, https://arxiv.org/pdf/2106.06072v1.pdf.Args:obb1 (torch.Tensor): A tensor of shape (N, 5) representing ground truth obbs, with xywhr format.obb2 (torch.Tensor): A tensor of shape (N, 5) representing predicted obbs, with xywhr format.eps (float, optional): A small value to avoid division by zero. Defaults to 1e-7.Returns:(torch.Tensor): A tensor of shape (N, ) representing obb similarities."""x1, y1 = obb1[..., :2].split(1, dim=-1)x2, y2 = obb2[..., :2].split(1, dim=-1)a1, b1, c1 = _get_covariance_matrix(obb1)a2, b2, c2 = _get_covariance_matrix(obb2)t1 = (((a1 + a2) * (y1 - y2).pow(2) + (b1 + b2) * (x1 - x2).pow(2)) / ((a1 + a2) * (b1 + b2) - (c1 + c2).pow(2) + eps)) * 0.25t2 = (((c1 + c2) * (x2 - x1) * (y1 - y2)) / ((a1 + a2) * (b1 + b2) - (c1 + c2).pow(2) + eps)) * 0.5t3 = (((a1 + a2) * (b1 + b2) - (c1 + c2).pow(2))/ (4 * ((a1 * b1 - c1.pow(2)).clamp_(0) * (a2 * b2 - c2.pow(2)).clamp_(0)).sqrt() + eps)+ eps).log() * 0.5bd = (t1 + t2 + t3).clamp(eps, 100.0)hd = (1.0 - (-bd).exp() + eps).sqrt()iou = 1 - hdif CIoU: # only include the wh aspect ratio partw1, h1 = obb1[..., 2:4].split(1, dim=-1)w2, h2 = obb2[..., 2:4].split(1, dim=-1)v = (4 / math.pi**2) * ((w2 / h2).atan() - (w1 / h1).atan()).pow(2)with torch.no_grad():alpha = v / (v - iou + (1 + eps))return iou - v * alpha # CIoUreturn iou
相关文章:
yolov8obb角度预测原理解析
预测头 ultralytics/nn/modules/head.py class OBB(Detect):"""YOLOv8 OBB detection head for detection with rotation models."""def __init__(self, nc80, ne1, ch()):"""Initialize OBB with number of classes nc and la…...
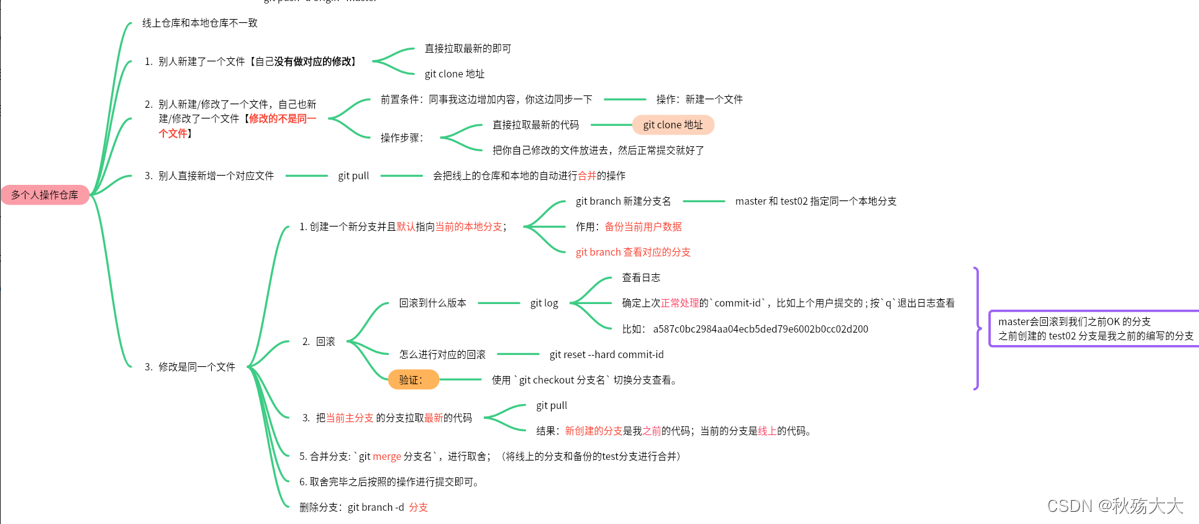
CICD之Git版本管理及基本应用
CICD:持续集成,持续交付--让对应的资料,对应的项目流程更加规范--提高效率 CICD 有很多的工具 GIT就是其中之一 1.版本控制概念与环境搭建 GIT的概念: Git是一款分布式源代码管理工具(版本控制工具) ,一个协同的工具。 Git得其数据更像是一系列微型文件系统的快照。使用Git&am…...

Python作用域及其应用
Python的作用域规则决定了变量在代码中的可见性和访问性。全局作用域中定义的变量可以在整个程序中访问,而局部作用域中定义的变量则只能在其被创建的函数或代码块中访问。 全局作用域与局部作用域 全局作用域中的变量通常在程序的顶层定义,可以被整个…...
谷歌上架,应用被Google play下架之后,活跃用户会暴跌?这是为什么?
在Google play上架应用,开发者们最不想到看到就是应用被下架了。这意味着所有的努力都将付诸东流,因为有的应用一但被下架,活跃用户也随之嗖嗖地往下掉,这事儿可真不是闹着玩的,严重影响了收益! 为什么你的…...

web安全渗透测试十大常规项(一):web渗透测试之Fastjson反序列化
渗透测试之Java反序列化 1. Fastjson反序列化1.1 FastJson反序列化链知识点1.2 FastJson反序列化链分析1.3.1 FastJson 1.2.24 利用链分析1.3.2 FastJson 1.2.25-1.2.47 CC链分析1.3.2.1、开启autoTypeSupport:1.2.25-1.2.411.3.2.2 fastjson-1.2.42 版本绕过1.3.2.3 fastjson…...

Unity 3D软件下载安装;Unity 3D游戏制作软件资源包获取!
Unity3D,它凭借强大的功能和灵活的特性,在游戏开发和互动内容创作领域发挥着举足轻重的作用。 作为一款顶尖的游戏引擎,Unity3D内置了先进的物理引擎——PhysX。这一物理引擎堪称业界翘楚,能够为开发者提供全方位、高精度的物理模…...
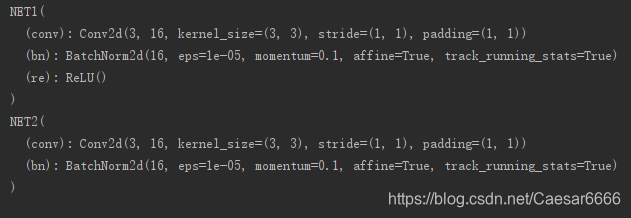
PyTorch之nn.Module与nn.functional用法区别
文章目录 1. nn.Module2. nn.functional2.1 基本用法2.2 常用函数 3. nn.Module 与 nn.functional3.1 主要区别3.2 具体样例:nn.ReLU() 与 F.relu() 参考资料 1. nn.Module 在PyTorch中,nn.Module 类扮演着核心角色,它是构建任何自定义神经网…...

2024.06.24 校招 实习 内推 面经
绿*泡*泡VX: neituijunsir 交流*裙 ,内推/实习/校招汇总表格 1、校招 | 昂瑞微2025届校园招聘正式启动 校招 | 昂瑞微2025届校园招聘正式启动 2、实习 | 东风公司研发总院暑期实习生火爆招募中 实习 | 东风公司研发总院暑期实习生火爆招募中 3、实习…...

【C++】using namespace std 到底什么意思
📢博客主页:https://blog.csdn.net/2301_779549673 📢欢迎点赞 👍 收藏 ⭐留言 📝 如有错误敬请指正! 📢本文作为 JohnKi 的学习笔记,引用了部分大佬的案例 📢未来很长&a…...
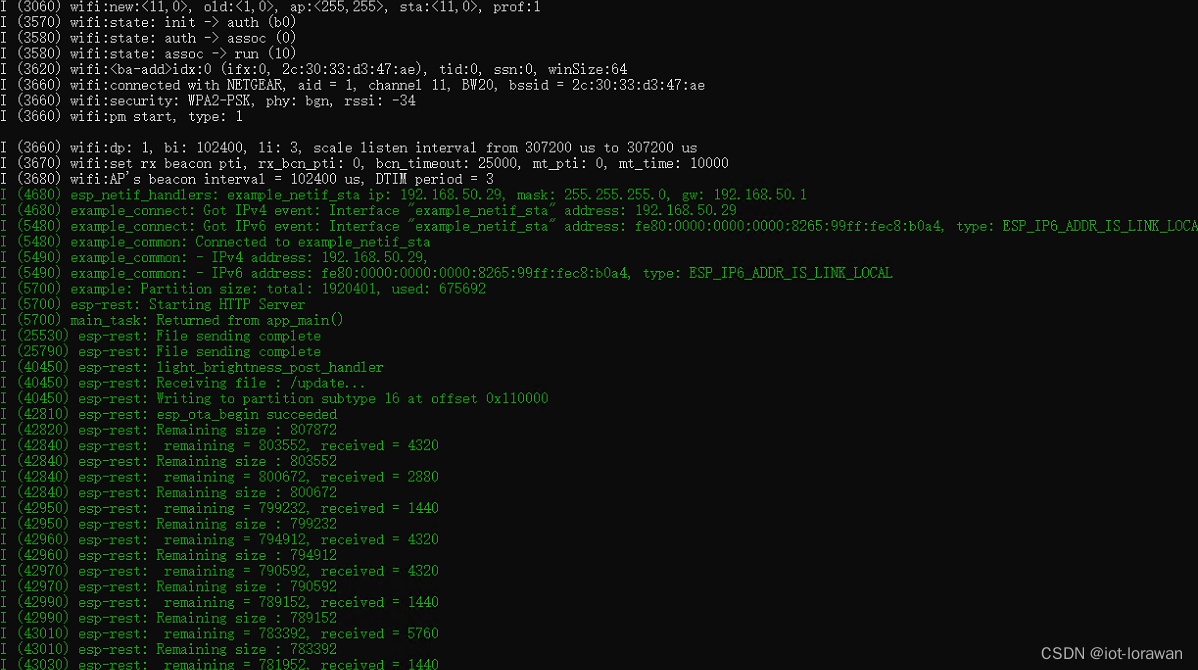
基于ESP32 IDF的WebServer实现以及OTA固件升级实现记录(三)
经过前面两篇的前序铺垫,对webserver以及restful api架构有了大体了解后本篇描述下最终的ota实现的代码以及调试中遇到的诡异bug。 eps32的实际ota实现过程其实esp32官方都已经基本实现好了,我们要做到无非就是把要升级的固件搬运到对应ota flash分区里面…...
116-基于5VLX110T FPGA FMC接口功能验证6U CPCI平台
一、板卡概述 本板卡是Xilinx公司芯片V5系列芯片设计信号处理板卡。由一片Xilinx公司的XC5VLX110T-1FF1136 / XC5VSX95T-1FF1136 / XC5VFX70T-1FF1136芯片组成。FPGA接1片DDR2内存条 2GB,32MB Nor flash存储器,用于存储程序。外扩 SATA、PCI、PCI expres…...

Android - Json/Gson
Json数据解析 json对象:花括号开头和结尾,中间是键值对形式————”属性”:属性值”” json数组:中括号里放置 json 数组,里面是多个json对象或者数字等 JSONObject 利用 JSONObject 解析 1.创建 JSONObject 对象,传…...

盲信号处理的发展现状
盲源分离技术最早在上个世纪中期提出,在1991年Herault和Jutten提出基于反馈神经网络的盲源分离方法,但该方法缺乏理论基础,后来Tong和Liu分析了盲源分离问题的可辨识性和不确定性,Cardoso于1993年提出了基于高阶统计的联合对角化盲…...
二轴机器人装箱机:重塑物流效率,精准灵活,引领未来装箱新潮流
在现代化物流领域,高效、精准与灵活性无疑是各大企业追求的核心目标。而在这个日益追求自动化的时代,二轴机器人装箱机凭借其较佳的性能和出色的表现,正逐渐成为装箱作业的得力助手,引领着未来装箱新潮流。 一、高效:重…...
使用python做飞机大战
代码地址: 点击跳转...

Python面向对象编程:派生
本套课在线学习视频(网盘地址,保存到网盘即可免费观看): https://pan.quark.cn/s/69d1cc25d4ba 面向对象编程(OOP)是一种编程范式,它通过将数据和操作数据的方法封装在一起࿰…...

华为仓颉编程语言
目录 一、引言 二、仓颉编程语言概述 三、技术特征 四、应用场景 五、社区支持 六、结论与展望 一、引言 随着信息技术的快速发展,编程语言作为软件开发的核心工具,其重要性日益凸显。近年来,华为公司投入大量研发资源,成功…...

【微信小程序开发实战项目】——如何制作一个属于自己的花店微信小程序(2)
👨💻个人主页:开发者-曼亿点 👨💻 hallo 欢迎 点赞👍 收藏⭐ 留言📝 加关注✅! 👨💻 本文由 曼亿点 原创 👨💻 收录于专栏:…...

解锁数据资产的无限潜能:深入探索创新的数据分析技术,挖掘其在实际应用场景中的广阔价值,助力企业发掘数据背后的深层信息,实现业务的持续增长与创新
目录 一、引言 二、创新数据分析技术的发展 1、大数据分析技术 2、人工智能与机器学习 3、可视化分析技术 三、创新数据分析技术在实际应用场景中的价值 1、市场洞察与竞争分析 2、客户细分与个性化营销 3、业务流程优化与风险管理 4、产品创新与研发 四、案例分析 …...

Bridging nonnull in Objective-C to Swift: Is It Safe?
Bridging nonnull in Objective-C to Swift: Is It Safe? In the world of iOS development, bridging between Objective-C and Swift is a common practice, especially for legacy codebases (遗留代码库) or when integrating (集成) third-party libraries. One importa…...

UE5 学习系列(二)用户操作界面及介绍
这篇博客是 UE5 学习系列博客的第二篇,在第一篇的基础上展开这篇内容。博客参考的 B 站视频资料和第一篇的链接如下: 【Note】:如果你已经完成安装等操作,可以只执行第一篇博客中 2. 新建一个空白游戏项目 章节操作,重…...

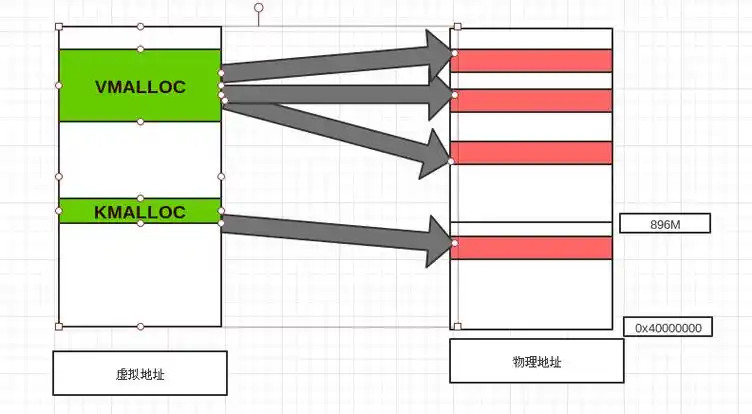
内存分配函数malloc kmalloc vmalloc
内存分配函数malloc kmalloc vmalloc malloc实现步骤: 1)请求大小调整:首先,malloc 需要调整用户请求的大小,以适应内部数据结构(例如,可能需要存储额外的元数据)。通常,这包括对齐调整,确保分配的内存地址满足特定硬件要求(如对齐到8字节或16字节边界)。 2)空闲…...
Lombok 的 @Data 注解失效,未生成 getter/setter 方法引发的HTTP 406 错误
HTTP 状态码 406 (Not Acceptable) 和 500 (Internal Server Error) 是两类完全不同的错误,它们的含义、原因和解决方法都有显著区别。以下是详细对比: 1. HTTP 406 (Not Acceptable) 含义: 客户端请求的内容类型与服务器支持的内容类型不匹…...
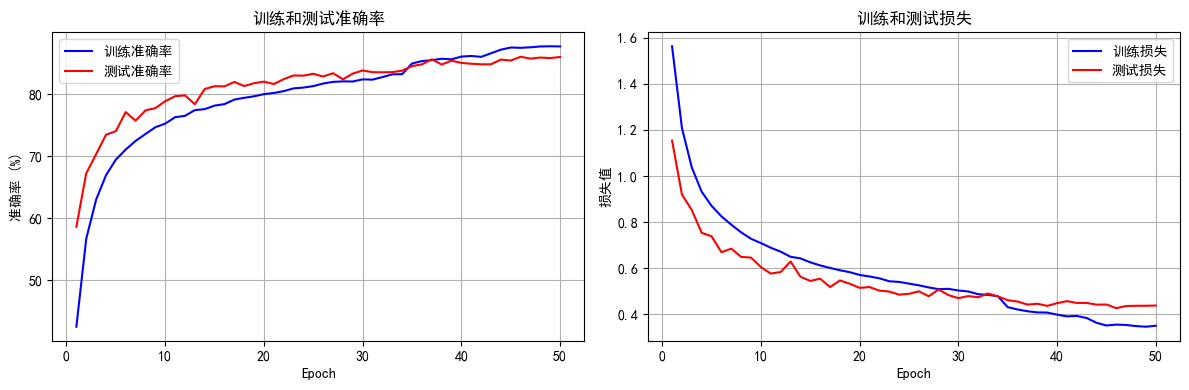
python打卡day49
知识点回顾: 通道注意力模块复习空间注意力模块CBAM的定义 作业:尝试对今天的模型检查参数数目,并用tensorboard查看训练过程 import torch import torch.nn as nn# 定义通道注意力 class ChannelAttention(nn.Module):def __init__(self,…...
)
postgresql|数据库|只读用户的创建和删除(备忘)
CREATE USER read_only WITH PASSWORD 密码 -- 连接到xxx数据库 \c xxx -- 授予对xxx数据库的只读权限 GRANT CONNECT ON DATABASE xxx TO read_only; GRANT USAGE ON SCHEMA public TO read_only; GRANT SELECT ON ALL TABLES IN SCHEMA public TO read_only; GRANT EXECUTE O…...

Unit 1 深度强化学习简介
Deep RL Course ——Unit 1 Introduction 从理论和实践层面深入学习深度强化学习。学会使用知名的深度强化学习库,例如 Stable Baselines3、RL Baselines3 Zoo、Sample Factory 和 CleanRL。在独特的环境中训练智能体,比如 SnowballFight、Huggy the Do…...

3403. 从盒子中找出字典序最大的字符串 I
3403. 从盒子中找出字典序最大的字符串 I 题目链接:3403. 从盒子中找出字典序最大的字符串 I 代码如下: class Solution { public:string answerString(string word, int numFriends) {if (numFriends 1) {return word;}string res;for (int i 0;i &…...

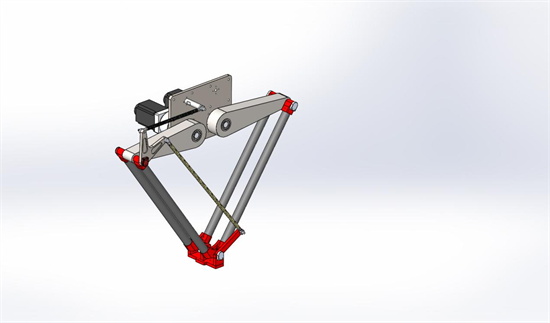
UR 协作机器人「三剑客」:精密轻量担当(UR7e)、全能协作主力(UR12e)、重型任务专家(UR15)
UR协作机器人正以其卓越性能在现代制造业自动化中扮演重要角色。UR7e、UR12e和UR15通过创新技术和精准设计满足了不同行业的多样化需求。其中,UR15以其速度、精度及人工智能准备能力成为自动化领域的重要突破。UR7e和UR12e则在负载规格和市场定位上不断优化…...
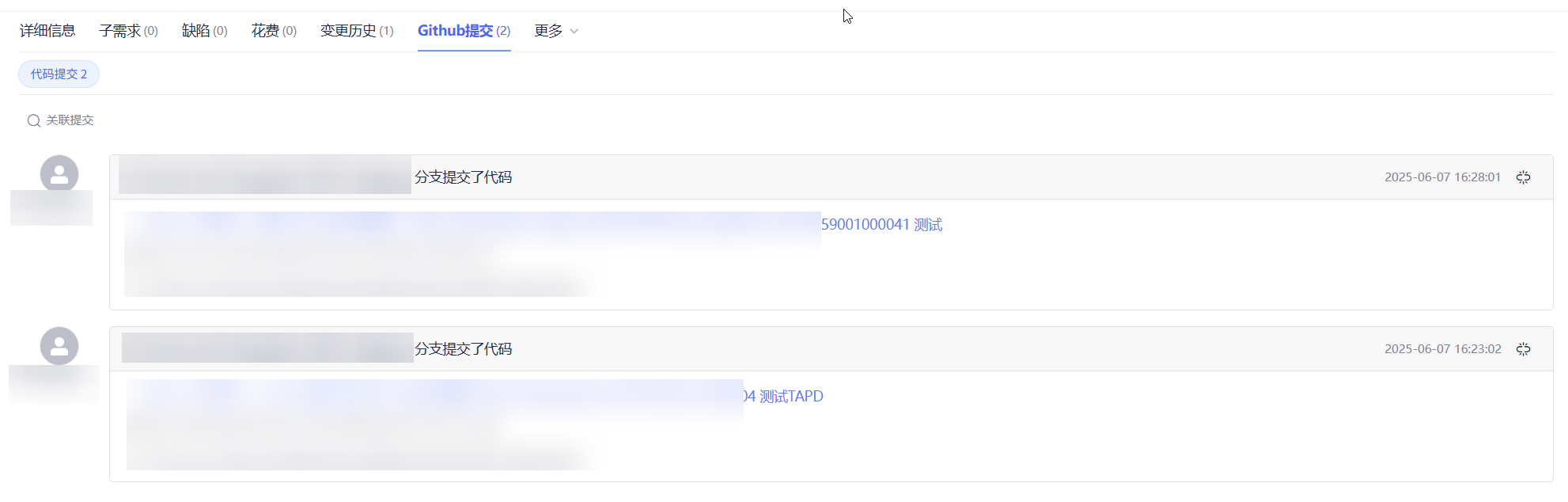
基于 TAPD 进行项目管理
起因 自己写了个小工具,仓库用的Github。之前在用markdown进行需求管理,现在随着功能的增加,感觉有点难以管理了,所以用TAPD这个工具进行需求、Bug管理。 操作流程 注册 TAPD,需要提供一个企业名新建一个项目&#…...
Linux 内存管理实战精讲:核心原理与面试常考点全解析
Linux 内存管理实战精讲:核心原理与面试常考点全解析 Linux 内核内存管理是系统设计中最复杂但也最核心的模块之一。它不仅支撑着虚拟内存机制、物理内存分配、进程隔离与资源复用,还直接决定系统运行的性能与稳定性。无论你是嵌入式开发者、内核调试工…...